
Je rencontre toute sorte de personne mais je reste discret

252 réponses à ce sujet
#202

Ulysse
-
- Membres
-

- 486 messages
Habitué
- Gender:Not Telling
Posté 27 janvier 2018 - 07:29
Coup de vent après tempête après averses après sale temps, faut trouver la motivation avant de ressortir à la plage.
Depuis que Pablo est équipé de sa LattePanda, je reprends les essais de Décembre 2016 sur l'utilisation d'une Kinect de XBOX 360 pour la détection des obstacles. Et pour éviter de tomber du quai, c'est haut.
- ashira aime ceci
#203
gerardosamara
-

- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 27 janvier 2018 - 09:29
Salut Ulysse
Concernant le kinetec v1 , on le trouve facilement d'occasion actuellement pour un petit prix ( dizaines d'euros) aussi il est tentant de l'intégrer dans un robot comme détecteur d'obstacle etc.
Le problème pour l'intégration à un robot est le besoin de 12V en complément d'une liaison USB et aussi la consommation ( 2 A ?)
Coté driver Linux c'est disponible
Coté bibliothèque python j'ai pas trop cherché
En conclusion je ne sais pas vraiment si ce produit pourrait faire partie d'une solution navigation autonome (Slam)
A voir.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#204
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 27 janvier 2018 - 09:43
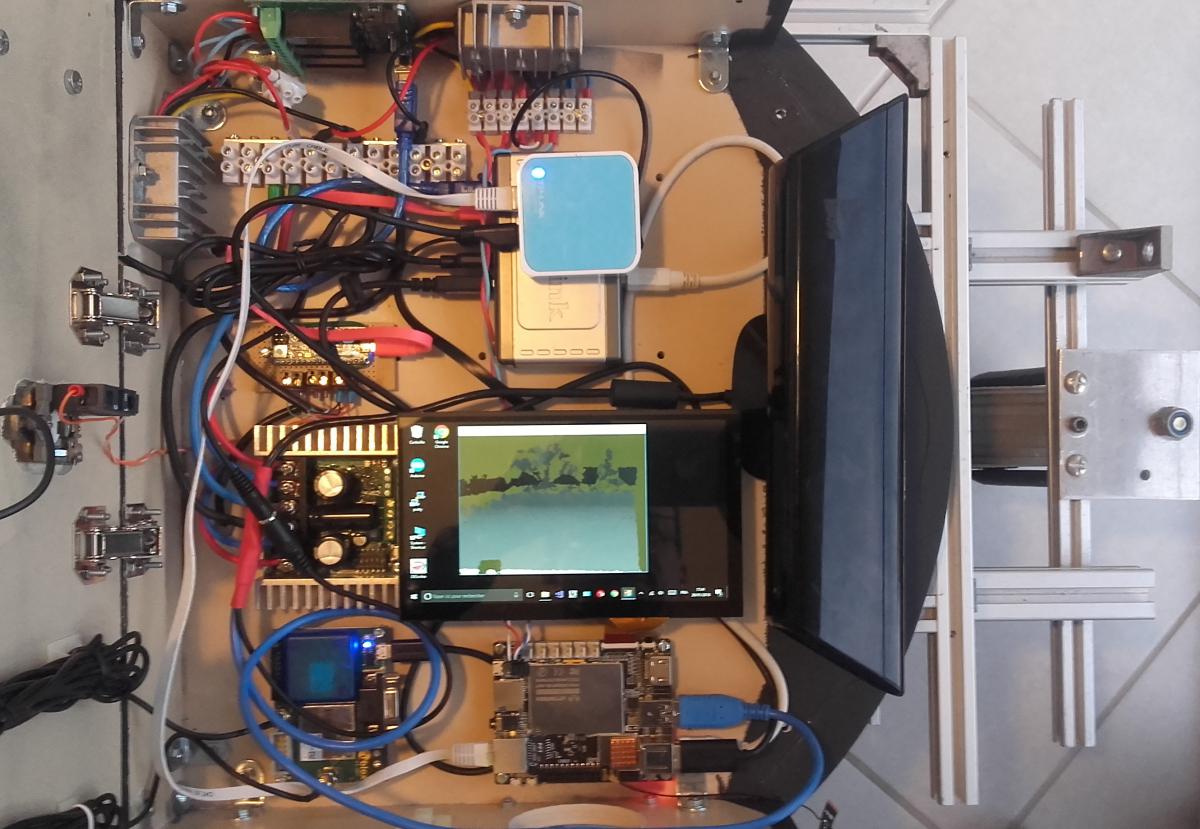
Oui, il y en a une poignée en occasion à côté de chez moi, j'en ai pris une à 15 euros.
J'ai modifié la connexion USB Xbox en USB PC. L'alimentation 12 volts est fournie par la batterie.
J'utilise le SDK de Microsoft, une page de code C# suffit à récupérer l'image de la profondeur. Encore un peu de travail avant d'implémenter le tout dans l'activité de navigation de Pablo.
J'ai modifié la connexion USB Xbox en USB PC. L'alimentation 12 volts est fournie par la batterie.
J'utilise le SDK de Microsoft, une page de code C# suffit à récupérer l'image de la profondeur. Encore un peu de travail avant d'implémenter le tout dans l'activité de navigation de Pablo.
#205
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 28 janvier 2018 - 09:09
(...)
En conclusion je ne sais pas vraiment si ce produit pourrait faire partie d'une solution navigation autonome (Slam)
A voir.
Indépendamment des contraintes d'alimentation qui dépendent de chaque robot, les kinect v1 et v2 sont gérées dans ROS, il y a donc du code qui tourne sur Linux pour ça. Ensuite, la Kinect renvoie un nuage de points (attention aux surfaces réfléchissantes !) qui est tout à fait adapté pour faire du SLAM (ça remplace la mesure par un laser).
Attention par contre, la v1 a une distance de mesure minimale de ~40cm, donc tout obstacle plus proche ne sera pas perçu.
- gerardosamara aime ceci
#206
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 29 janvier 2018 - 07:08
Pour câbler la Kinect 360 sur un port USB :
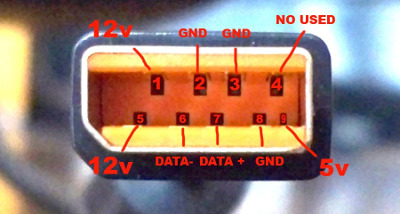
Ça donne quelque chose comme ça :

Logiquement placé sur le devant, câblé sur le port USB 3.0, il reste de la place
Le parebrise en plexi a sauté, faudra ajouter quelque chose pour protéger un peu tout ça.

Pour l'instant il s'agit simplement de faire quelques essais pour voir ce que ça donne en extérieur. Rien de définitif.
#207
R1D1
-
- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 29 janvier 2018 - 07:15
(...)
Pour l'instant il s'agit simplement de faire quelques essais pour voir ce que ça donne en extérieur. Rien de définitif.
Pas grand chose j'en ai peur : la mesure de distance se fait par infrarouge. Certes, il pleut en Bretagne, mais tu risques d'avoir beaucoup de bruit à cause du soleil.
#208
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 29 janvier 2018 - 08:55
Oui, ce n'est clairement pas gagné.
Blanc : très près
Clair : près
Noir : Loin
Violet : hors de portée
Or : impossible à définir ( trop près ou pas de mesure possible )
A l'intérieur ça va.

Dehors, à la tombé du jour : la terrasse est trempée mais pas d'obstacle en vue, des végétaux sur la droite

Ha, un gros pot de fleur à 3 mètres ...

De l'herbe trampée, une haie de végétaux à quelques mètres au fond. C'est déjà moins évident.
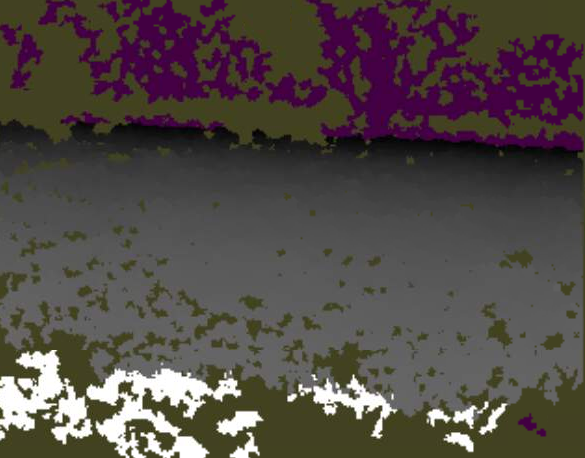
Alors oui, au soleil avec la réverbération sur le sable mouillé ...
#209
Mike118
-

- Administrateur
-
- 10â¯281 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 janvier 2018 - 09:14
Pour un robot d'intérieur ok pourquoi pas ...
Mais quel est l'utilité de la kinect sur ton robot ?
Participer à la localisation ? Dans ce cas de la stéréovision ( sans depht sensor) est préférable
Faire de l'anti colision ? Dans ce cas les les ultrasons sont parfaits ...
Parfois le mieux est l'ennemi du bien.
Il faut faire simple et efficace ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#210
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 29 janvier 2018 - 10:28
Je vais jusqu'au bout des essais, je veux être absolument certain de la faisabilité ou pas et je suis plus à l'aise avec les caméras et l'analyse d'images. C'est pour éviter de rouler sur tout les bambins qui traînent sur la plage ET naviguer ici et là parmi les gens...
#211
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 14 avril 2018 - 07:02
Quand je disais qu'il est souvent difficile de réunir toutes les conditions pour réaliser les essais en extérieur ...
Je vais finir noyé par la marée, électrocuté par les batteries, de froid par la grêle, frappé par la foudre ou par une douceur du style
#212
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 avril 2018 - 08:20
La semaine prochaine, il fera beau, semble t-il.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#214
ashira
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 02 mai 2018 - 08:30
Hello! C'est possible d'avoir un petit retour sur tes balises rtk ?
Par exemple tu observes bien une précision à 2cm près ?
Tu as aussi une mesure de l'altitude et à la même précision ?
Une fois le système initialisé etc, il n'y a jamais de dérive ou autre ?
Par exemple tu observes bien une précision à 2cm près ?
Tu as aussi une mesure de l'altitude et à la même précision ?
Une fois le système initialisé etc, il n'y a jamais de dérive ou autre ?
#215
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 21 mai 2018 - 06:04
@ashira
Le module que j'utilise est un C94-M8P de u-blox
La précision est en théorie de l'ordre du centimètre. En utilisant le logiciel u-center, j'observe une déviation de 2 cm lorsque Pablo est au repos (disons que ça bouge un peu mais c'est si faible que je ne peut pas le mesurer). Il m'est arrivé d'observer d'un coup un 'bond' d'un mètre mais ce jour-là j'avais laissé l'antenne de la base sur un toit brulant à 50° donc ce n'est pas représentatif.
Du coup je t'ai fait une manip aujourd'hui. J'ai créé un parcours dans le jardin que Pablo a répété inlassablement durant toute l'après-midi. Les points à relier sont matérialisés par des CD.
Voici le résultat en fin de journée.
Pablo est un véhicule en mouvement, il réalise de grands déplacements de plusieurs kilomètres à chaque sortie du coup je ne lui demande pas une précision centimétrique. Au début je me contentais d'un mètre, ensuite j'ai voulu 50 cm, aujourd'hui c'est le diamètre d'un CD et ça me convient. Pour être clair, les derniers centimètres sont comptés par odométrie.
Pour être plus précis il faudrait intégrer la vitesse.
En ce qui concerne l'altitude, je parse la trame RMC qui ne contient pas cette valeur. Donc aujourd'hui je ne peux pas te répondre sur la précision en altitude.
#217
zavatha
-

- Membres
-
- 233 messages
Membre occasionnel
- Gender:Male
Posté 21 mai 2018 - 10:20
Salut
Oui je suis impressionné aussi par cette précision...
Il déboute vraiment ce robot ! Encore bravo !
Zav
Oui je suis impressionné aussi par cette précision...
Il déboute vraiment ce robot ! Encore bravo !
Zav
#218
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 05 décembre 2018 - 10:28
En liaison avec le sujet Télémétrie pour mon robot d'exploration par levend, je vous montre mon utilisation de modules radio pour échanger quelques données entre le rover et d'autres matériels.
Dans le rover j'ai un module USB NiceRF SV653-mesh 433 MHZ 500 MW. 
Une trentaine d'euros, j'ai ai pris deux.
L'antenne sort directement sur le côté gauche 
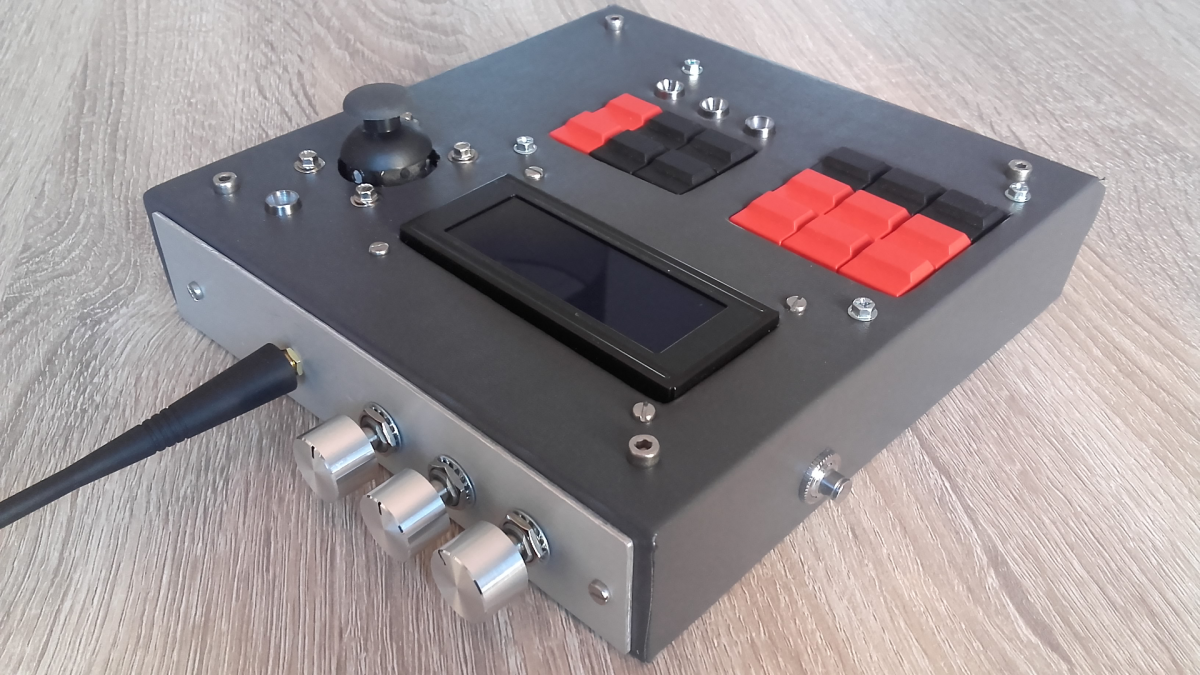
Dans un boîtier de télécommande, j'ai un module TTL NiceRF SV651-mesh 433 MHZ 500mW 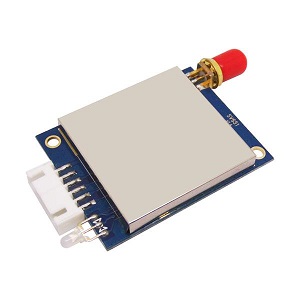
Même prix, j'ai ai pris deux.
On y trouve le module radio, un arduino, un afficheur, un clavier, un joystick, des potentiomètres, une batterie ... 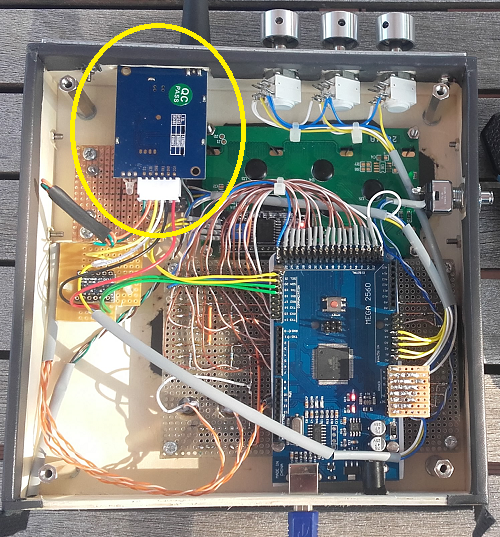
Quelques datas qui sont transmises chaque seconde par Pablo :
- Les données GPS (Latitude, Longitude, Speed, Course)
- Les coordonnées GPS à atteindre (Latitude,Longitude)
- L'orientation donnée par le compas
- Le cap à tenir
- La correction du compas
- La commande pour les moteurs (direction, vitesse)
- La vitesse(plot, move)
- Le nom du fichier à tracer
- La longueur totale du parcours
- La distance effectuée
- Le nombre de segments à tracer et le numéro du segment en cours
- L'état de l'outil
- La tension de la batterie
- La température du contrôleur de moteur
Quelques datas qui sont transmises à la demande par la télécommande :
- Les valeurs du joystick (avant arrière droite gauche)
- Les consignes des potentiomètres (vitesse de déplacement et de tracé et correction du compas)
- Les touches du clavier (START, STOP, outil HAUT/BAS, Track++/Track--, Track Clear/catch/save, Light ON/OFF ...)
L'affichage est bien lisible au soleil, les touches beaucoup plus pratiques qu'un clavier tactile de smartphone.
La plage fait plus d'un kilomètre, je ne perd pas le contrôle à cette distance (contrairement au wifi avec le smartphone). Au-delà je ne sais pas et il faut une paire de jumelles pour ne pas perdre le rover de vue.
Je profite du deuxième module radio USB pour récupérer aussi les données transmises par Pablo et le suivre à distance sur l'écran du PC portable avec une application ( une carte en mode "vue satellite" et l'affichage des données en mode "cadrans" . Et cette application est aussi une télécommande virtuelle.
#219
levend
-

- Membres
-
- 5â¯679 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 05 décembre 2018 - 10:45
Pablo a plusieurs antennes, tu as plusieurs modules ?
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#220
Mike118
-
- Administrateur
-
- 10â¯281 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 06 décembre 2018 - 02:48
Si je ne me trompe pas, de ce que j'ai compris il y a une seconde antenne pour la communication robot PC.
Et je suppose qu'il y a aussi une antenne pour le GPS RTK non ?
Mais du coup j'ai pas encore le compte =) car on voit 4 antennes sur le robots ...
Mais deux sont identiques ... alors peut être qu'un système a deux antennes ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : UGV, Land Art
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandéDébuté par gerardosamara, 27 mars 2016 |
|
|
||
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Plateforme de développementDébuté par Taupiot_Jr, 24 nov. 2014 |
|
|
1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




