

C'est du beau travail, c'est propre. 

252 réponses à ce sujet
#162

levend
-

- Membres
-

- 5â¯710 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 03 septembre 2017 - 07:37
Il faut changer de véhicule pour qu'il soit plus facile à monter dedans.
J'ai un monospace, avec des rampes ce sera à facile à monter, en attendant une belle remorque...
- Ulysse aime ceci
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#163
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 03 septembre 2017 - 07:53
Il faut changer de véhicule pour qu'il soit plus facile à monter dedans.
J'ai un monospace, avec des rampes ce sera à facile à monter, en attendant une belle remorque...
J'ai très souvent pensé à tes projets 'lourds' en modifiant Pablo ( tes projets que je suis très attentivement ! ). Pour l'instant je me contente de basculer les sièges à l'arrière pour faire de la place lors du transport. J'ai aussi une grande remorque et j'ai pensé à l'utiliser avec une rampe. Mais bientôt Pablo sera utilisé pour des missions plus furtives, avec la voiture garée discrètement dans un coin (*) donc la remorque serait plutôt un handicap. Mais l'idée reste évidement bonne.
(*) tiens donc ...
#164
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 05 septembre 2017 - 07:48
Si vous suivez le projet il y a un élément nouveau dans cette version qui n'apparait pas ici ...
Personne n'a trouvé ? On trouve sur le rover un nouveau module récepteur RTK C94‑M8P. Qui dit RTK dit association d'un module 'rover' et d'un module 'base' qui communiquent par liaison radio UHF (433 MHZ). L'élément manquant qui n'apparait pas sur l'image est donc le module 'base'.
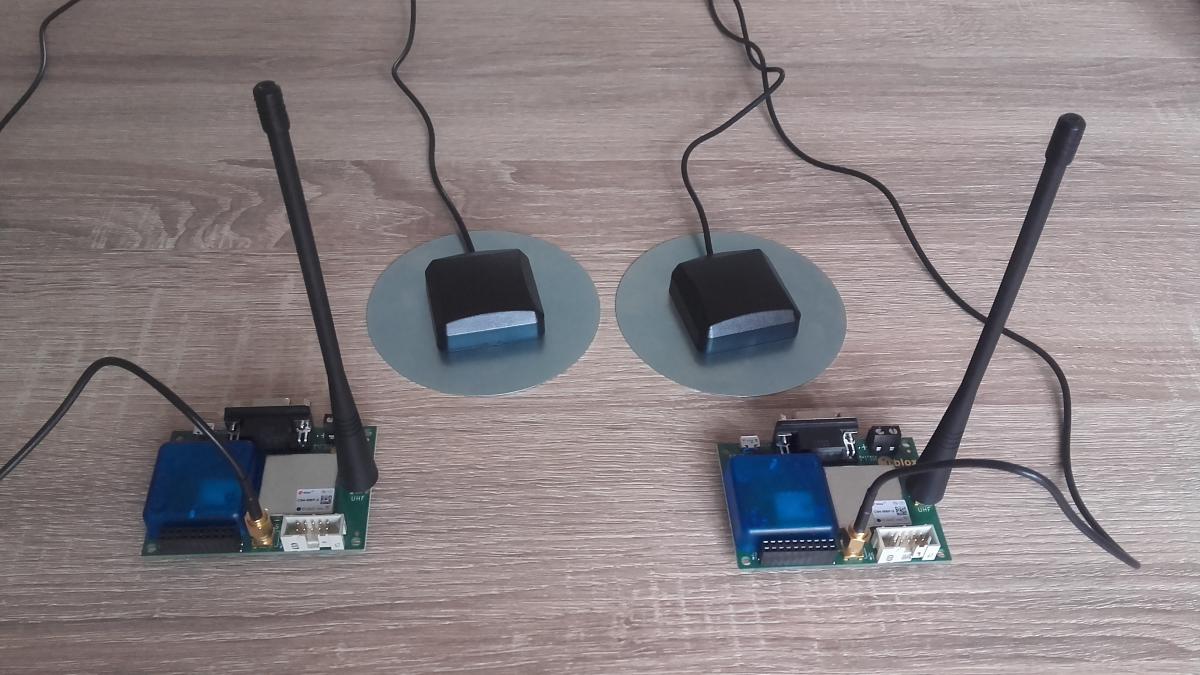
L'association de la base (fixe) et du rover permet d'atteindre une précision de quelques centimètres, et surtout sans dérive dans le temps. C'est très important pour que Pablo trace et retrace au bon endroit. Je confirme par les essais dans le jardin, reste à réaliser des tests de portée, il me faut 500 mètres sur la plage (TX power=11dBm, je ne sais pas ce que ça va donner)
Pour l'heure la base est alimentée sur secteur mais il faut aussi la rendre autonome. Je fait donc en parallèle des essais de durée sur une batterie ... de perceuse sans fil.

#166
Mike118
-

- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 05 septembre 2017 - 10:31
GPS centimétrique RTK,
En gros en plus de la balise GPS, sur le robot tu as une balise GPS sur la balise fixe qui communique avec le robot.
En mesurant la différence entre ce que donne la balise qui est à une position donnée et ce que donne le robot tu peux améliorer la précision du robot . Ce ce que fais le kit qu'il a =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#168
yamovince
-

- Membres
-
- 300 messages
Habitué
Posté 05 septembre 2017 - 11:40
Magnifique tout ce hardware! et du coup tu as déjà fait de nouveaux essais sur le sable ?


#169
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 06 septembre 2017 - 04:58
@Mike & @Path
Oui, il y a pas mal de documentation à ce sujet sur le net. Le résultat est vraiment bon.
@Yamovince
Pas encore de remise en service du râteau depuis la V2, je serais probablement prêt vers mi-Septembre. Des idées de dessin ?
Sinon la base a continué à émettre toute la nuit sur batterie, donc c'est validé. Il n'y a plus qu'à mettre tout ça dans un boîtier pour faire quelque chose de compact et facilement transportable. Avec un trépied ça serait le pied.
#170
zavatha
-

- Membres
-
- 233 messages
Membre occasionnel
- Gender:Male
Posté 09 septembre 2017 - 08:01
impressionnant !
tu dessines où au juste ? en bretagne ? (je demande car c'est là bas que je vais généralement en vacances et je serais curieux de voir la bête de près et en action ...)
++
zav
#171
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 09 septembre 2017 - 10:36
Oui, je réalise tous les essais dans les Côtes d'Armor, très précisément sur cette plage parce qu'elle est à 20 minutes en voiture de chez moi et très pratique pour Pablo : très peu de monde (sauf en été) , parking un peu en retrait, promenade qui domine la plage, accès par une rampe et surtout une grande surface à marée basse ( 700 x 150 mètres voire plus selon coefficient ) .

Je tente bientôt une autre belle surface ( mais suis pas sûr d'être prêt à temps) . Quiz : saurez-vous retrouver ce lieux ?

#172
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 09 septembre 2017 - 11:59
Pas encore de remise en service du râteau depuis la V2, je serais probablement prêt vers mi-Septembre. Des idées de dessin ?
Un Pablo de trois quarts pour une Pablo-ception ? 
Oui, je réalise tous les essais dans les Côtes d'Armor, très précisément sur cette plage parce qu'elle est à 20 minutes en voiture de chez moi et très pratique pour Pablo : très peu de monde (sauf en été) , parking un peu en retrait, promenade qui domine la plage, accès par une rampe et surtout une grande surface à marée basse ( 700 x 150 mètres voire plus selon coefficient ) .
Je tente bientôt une autre belle surface ( mais suis pas sûr d'être prêt à temps) . Quiz : saurez-vous retrouver ce lieux ?

Random guess :
Spoiler
#174
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 septembre 2017 - 02:51
Dinard !Pas tout à fait mais pas très loin, disons qu'il faudrait nager un peu pour y arriver.
Un indice : un festival en Septembre ...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#175
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 10 septembre 2017 - 01:50
Bien vu !
C'est la plage de l'écluse, on reconnait le casino, la piscine ( eau de mer ) ... La ville accueille le festival du film britannique du 27 Septembre au 01 Octobre, une belle occasion à saisir surtout que la marée sera idéale le weekend, c'est à dire basse le matin. Faut juste être prêt à temps.
Et la promenade qui loge cette plage s'appelle la promenade ... Pablo (Picasso). Ça ne s'invente pas !
#176
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 17 septembre 2017 - 05:38
- Nouvelle antenne UHF 2.4 ghz pour la liaison avec la base (évidement il y avait une erreur dans la description entre connecteur SMA et RP-SMA mais j'avais l'adaptateur pour rectifier)

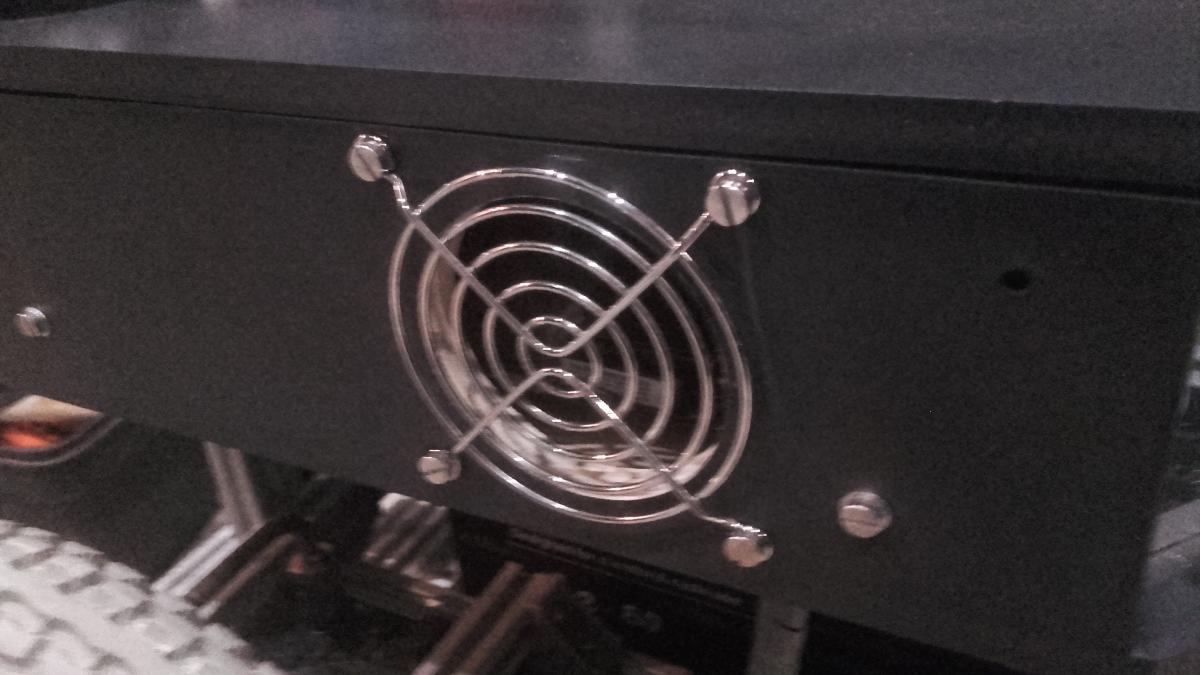
- Belle aération à côté de la carte Lattepanda because ça chauffe
- Fixation du râteau et réglage des fin de course
- Câblage du bouton arrêt d'urgence
Ready !
#177
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 25 septembre 2017 - 08:19
Je vous tiens au courant des avancées sans trop saouler de détails :
Pression des pneus (rigolez pas, 40 kg c'est lourd!) et sortie à la plage ce week-end malgré la météo maussade. Le temps couvert à fait place au crachin puis aux averses. Dans ces conditions pas facile de mettre au point, néanmoins la surface de sable était top.
Réglages du râteau nickel. Il est plus court pour une meilleure précision dans les virages. Les traces sont bien nettes, on les voit bien depuis le front de mer situé un peu en hauteur.
Mais l'antenne de liaison UHF entre la base et le rover était arrachée et le connecteur USB micro-B du compas était HS lui aussi, probablement casés lors du transport. Dommage car Pablo ne peut pas tracer de figure sans sa boussole. J'ai néanmoins utilisé mon smartphone pour télécommander par Wifi et tester le nouveau PC, l'autonomie de la batterie, le râteau ...


Faut que je pense à vous montrer la base : une perche télescopique en aluminium (3 mètres dépliée) réalisée à partir d'une perche de piscine, plantée droit dans le sable, avec sur le dessus l'antenne GPS, puis au milieu le boîtier qui contient la carte électronique, l'antenne UHF, enfin la batterie un peu plus bas.
Je répare tout ça pour de nouveau essais et vous dis la suite.
#178
R1D1
-
- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 25 septembre 2017 - 09:23
C'est juste trop cool ! Un robot en conditions extérieures réelles. J'adore ! 

#180
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2017 - 07:35
L'origine des grands géoglyphes péruviens, enfin résolue !

- Amhnemus aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : UGV, Land Art
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandéDébuté par gerardosamara, 27 mars 2016 |
|
![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)
|
||
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Plateforme de développementDébuté par Taupiot_Jr, 24 nov. 2014 |
|
|
1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




