Reprenant les nombreux concepts abordés dans les deux chapitres sur Les principes de base de l’électrotechnique, nous allons aborder progressivement l’élaboration du circuit qui permet de gérer la rotation du barillet de la mémoire RAM de notre machine. Du reste, le sigle RAM n’est pas vraiment pertinent, car il signifie que l’accès à chaque cellule de la mémoire vive est direct, (Random Access Mémories.) alors que par sa conception c’est une mémoire à accès séquentiel. En logique traditionnelle on parlerait plus rigoureusement d’un registre à décalage. Sur notre machine mécanique, ce registre peut contenir entre 1 et 56 BITs en fonction de la taille des données manipulées par le programme chargé dans la machine, choix laissé à l’initiative du programmeur.
Peu importe le vocable utilisé à partir du moment où l’on se comprend.
Compromis visant à satisfaire plusieurs critères tant techniques qu’économiques, le moteur qui anime la rotation du carrousel a été sélectionné dans ceux disponibles car sa vitesse de rotation est un peu plus faible, tournant à 30tr/min au lieu de 40tr/min comme ceux utilisés sur les unités d’écriture et sur le module de lecture. Probablement qu’il serait possible d’approvisionner que des références de 40tr/min pour une homogénéité d’achat et réduire à un seul moteur le matériel prévu pour pouvoir changer un moteur en défaut. (Il faut toujours prévoir la maintenance sur le long terme, surtout à une époque où les changements sont rapides et le suivi des produits … aléatoire.) Comme le plateau présente une certaine inertie, j’avais envisagé une motorisation un peu moins « nerveuse » pour diminuer un peu les accélérations, donc les efforts sur les piges du barillet. Je pense que c’est une précaution qui ne s’impose pas vraiment, mais le matériel a été acheté, et autant l’utiliser. Vu l’angle de rotation faible, la rapidité de la machine n’est que peu affectée.
1,2 et 3) Faire tourner d’une cellule à la fois.
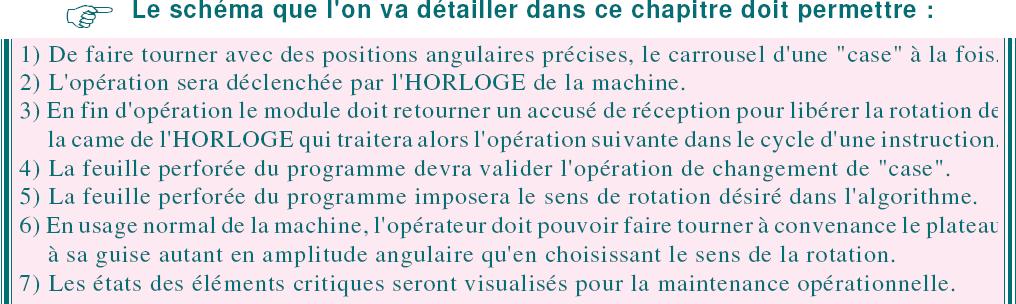
 Action élémentaire à satisfaire, on se contente en Fig.13 d’extraire de la Fig.12 la partie qui active le moteur, c’est à dire le déclenchement par l’impulsion de courte durée et le microcontact de fin de mouvement. Quel que soit le sens de rotation, sur la machine c’est le même capteur qui est sollicité. Pour mémoire, la came du moteur d’HORLOGE tourne et active le microcontact S1DS. (Switch n°1 du Début de Séqence.)
Action élémentaire à satisfaire, on se contente en Fig.13 d’extraire de la Fig.12 la partie qui active le moteur, c’est à dire le déclenchement par l’impulsion de courte durée et le microcontact de fin de mouvement. Quel que soit le sens de rotation, sur la machine c’est le même capteur qui est sollicité. Pour mémoire, la came du moteur d’HORLOGE tourne et active le microcontact S1DS. (Switch n°1 du Début de Séqence.)
Pour mémoire, une séquence débute par le passage au travail T (GND) un court instant du capteur S1DS. Le relais R1MR s’active et immédiatement le Moteur de Rotation MR se met en mouvement, libérant le Switch S2FS qui passe au repos R. La section CT de a.m. est alors polarisée au potentiel de GND et R1MR conserve son état travail alors que la came du moteur d’HORLOGE libère S1DS qui isole T de GND. La rotation du barillet se poursuit jusqu’à ce que la came (En réalité la roue dentée.) entrainée par MR vienne réactiver S2FS qui repasse au travail T. La section CT de a.m. s’isole et le relais « décroche » adoptant la position R. Instantanément MR stoppe sa rotation par les phénomènes de contre courant. Enfin S2FS en repassant au travail T envoie son « accusé de réception » au moteur d’HORLOGE pour enchaîner l’opération suivante.
4) Le programme valide la rotation du barillet.
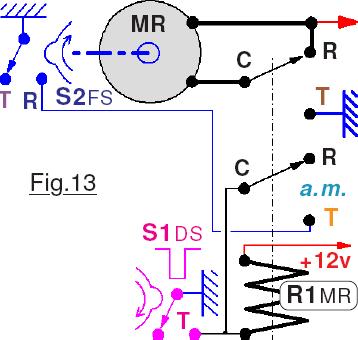
 L’horloge de la logique interne de cet ordinateur mécanique, par conception des schémas, va envoyer systématiquement une impulsion de début de cycle GND aux divers « points froids » des modules fonctionnels sans se préoccuper de savoir s’ils sont programmés dans la feuille perforée. Hors il ne faut actionner le moteur de l’unité concernée que si « le programme » fournit un +12v en sortie concernée de la MATRICE de diodes. Pour n’activer le moteur que si l’action est programmée, il suffit de transmettre directement la sortie de la MATRICE au « point chaud » du relais moteur R1MR. La Fig.14 montre bien que la condition nécessaire et suffisante pour que R1MR puisse passer en état travail, est que l’une au moins des deux sorties G ou D soit validée dans la feuille de programme. (Si les deux sont validées par erreur de perforation seul le sens sera affecté.)
L’horloge de la logique interne de cet ordinateur mécanique, par conception des schémas, va envoyer systématiquement une impulsion de début de cycle GND aux divers « points froids » des modules fonctionnels sans se préoccuper de savoir s’ils sont programmés dans la feuille perforée. Hors il ne faut actionner le moteur de l’unité concernée que si « le programme » fournit un +12v en sortie concernée de la MATRICE de diodes. Pour n’activer le moteur que si l’action est programmée, il suffit de transmettre directement la sortie de la MATRICE au « point chaud » du relais moteur R1MR. La Fig.14 montre bien que la condition nécessaire et suffisante pour que R1MR puisse passer en état travail, est que l’une au moins des deux sorties G ou D soit validée dans la feuille de programme. (Si les deux sont validées par erreur de perforation seul le sens sera affecté.)
5) Le programme impose le sens de rotation du barillet.
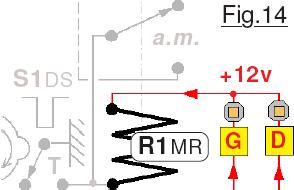
 Reprenant la technique de base de la Fig.8 le pilotage P du relais de croisement des fils d’alimentation du moteur sera commandé par la sortie de la matrice pour la rotation vers la droite. Toutefois, seule cette sortie doit activer le relais R2SR inversant le Sens de Rotation. C’est la raison pour laquelle sur la Fig.15 on peut observer la diode D1 laisse passer le +12v vers le « point chaud » du relais R1MR et empêche G d’activer le relais d’inversion de sens R2SR. Noter au passage que pour simplifier la lecture de tous ces schémas partiels, les diodes de roue libre ainsi que les résistances de 270Ω ne sont pas représentées. À bien observer le schéma Fig.15 vous constaterez que les fils qui véhiculent l’énergie de puissance vers le moteur sont plus épais que ceux qui ne font que conduire des faibles signaux logiques vers les relais ou gérant la configuration.
Reprenant la technique de base de la Fig.8 le pilotage P du relais de croisement des fils d’alimentation du moteur sera commandé par la sortie de la matrice pour la rotation vers la droite. Toutefois, seule cette sortie doit activer le relais R2SR inversant le Sens de Rotation. C’est la raison pour laquelle sur la Fig.15 on peut observer la diode D1 laisse passer le +12v vers le « point chaud » du relais R1MR et empêche G d’activer le relais d’inversion de sens R2SR. Noter au passage que pour simplifier la lecture de tous ces schémas partiels, les diodes de roue libre ainsi que les résistances de 270Ω ne sont pas représentées. À bien observer le schéma Fig.15 vous constaterez que les fils qui véhiculent l’énergie de puissance vers le moteur sont plus épais que ceux qui ne font que conduire des faibles signaux logiques vers les relais ou gérant la configuration.
6) Mode contrôle MANUEL de la machine.
Contradictoire avec le fonctionnement automatique sous contrôle d’un programme logé dans une feuille perforée, pouvoir faire fonctionner n’importe quelle unité fonctionnelle de l’ensemble reste impératif, tant dans une optique de maintenance qu’en usage normal de cet ordinateur électromécanique. Compte tenu de la lenteur « relative » de déroulement des instructions, et surtout du nombre que va en engendrer le programme, (Qui peut aller jusqu’à l’infini si l’algorithme adopté n’est pas pertinent.) la durée pour aboutir à la fin peut facilement prendre plusieurs heures de fonctionnement. Il serait très désagréable de voir un programme qui « travaille » déjà depuis six heures être interrompu par accident, un visiteur invité dans le local et intrigué par cette « chose » ayant appuyé sur l’un des boutons réservés au fonctionnement manuel.
– C’est quoi ce joli bouton rouge ? Clic … FIN des clics clics clics sur la machine !
– GRRRRRRRRRrrrrrrrrrrrrrrrrr.
Par ailleurs, il faut pouvoir isoler les signaux transmis par la MATRICE de programme de ceux générés par les boutons poussoir de contrôle manuel. Enfin, pour faciliter grandement l’approvisionnement en composants les plus courants du commerce, les boutons poussoir seront de type « isolé » au repos et « contact fermé » au travail. Le sous schéma que l’on devra ajouter à tout ce qui précède doit pouvoir :

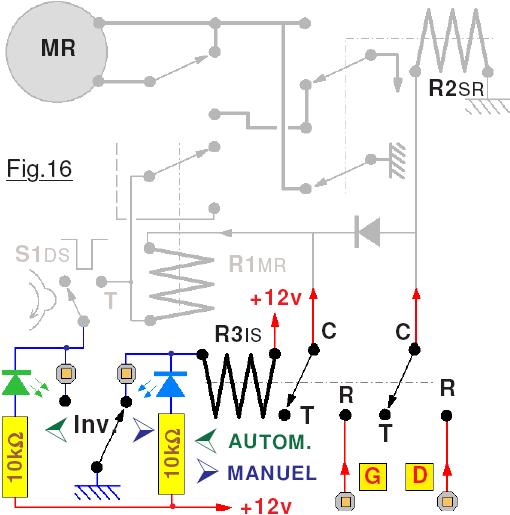 Concilier ces critères n’est pas évident, et nous amène au premier schéma simplifié de la Fig.16 relative à l’unité de rotation du carrousel. Pour les autres fonctionnalités de la machine, on se doute qu’il y aura forcément des adaptations spécifiques. Un relais R3IS d’Isolation des Signaux de la MATRICE est piloté par un Inverseur bistable. Sur le tableau de commande deux diodes électroluminescentes rendront compte de la configuration en cours. La LED verte signalera le mode « RUN » en cours alors que la bleue précisera que le mode MANUEL est validé. Naturellement ces deux configurations sont réciproquement exclusives. Notons au passage que le niveau GND n’est propagé sur le Switch de début de séquence S1DS que si l’inverseur est en mode AUTOMATIQUE. En MANUEL l’état imposé par la came de l’HORLOGE sera ignoré.
Concilier ces critères n’est pas évident, et nous amène au premier schéma simplifié de la Fig.16 relative à l’unité de rotation du carrousel. Pour les autres fonctionnalités de la machine, on se doute qu’il y aura forcément des adaptations spécifiques. Un relais R3IS d’Isolation des Signaux de la MATRICE est piloté par un Inverseur bistable. Sur le tableau de commande deux diodes électroluminescentes rendront compte de la configuration en cours. La LED verte signalera le mode « RUN » en cours alors que la bleue précisera que le mode MANUEL est validé. Naturellement ces deux configurations sont réciproquement exclusives. Notons au passage que le niveau GND n’est propagé sur le Switch de début de séquence S1DS que si l’inverseur est en mode AUTOMATIQUE. En MANUEL l’état imposé par la came de l’HORLOGE sera ignoré.
Sur les schémas on peut observer la présence de symboles du genre ![]() . Ils symbolisent les divers picots des connecteurs HE14 assurant les liaisons électriques entre le circuit imprimé du module et les interconnections avec le reste des automatismes.
. Ils symbolisent les divers picots des connecteurs HE14 assurant les liaisons électriques entre le circuit imprimé du module et les interconnections avec le reste des automatismes.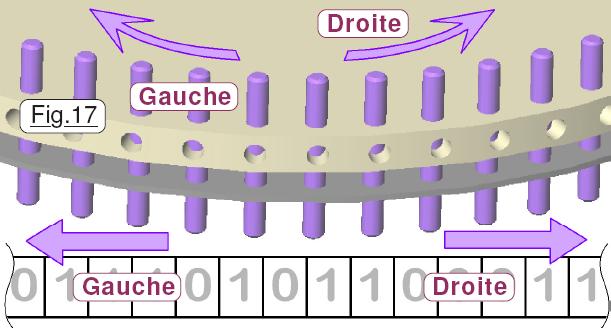
Avec l’ajout de la Fig.16 on isole les signaux respectifs des deux modes, il reste encore à compléter avec les deux boutons poussoir qui seront à la disposition de l’opérateur. Comme l’une des deux commandes doit inverser le sens de rotation du moteur MR, un relais devient indispensable pour remplacer D de la matrice. On complète dans ce but la structure initiale par les circuits de la Fig.18 repérés par des couleurs sur le dessin.
Toutefois, il importe en préambule, d’avoir une interprétation non ambigüe de la notion de rotation vers la droite D ou vers la gauche G. Bien que cette notion soit concrètement relative au mouvement du barillet, il faut surtout imaginer la bande de longueur infinie dont parle Turing dans sa description de la machine « mathématique » virtuelle. La Fig.17 proposée ci-contre précise cette notion fondamentale.
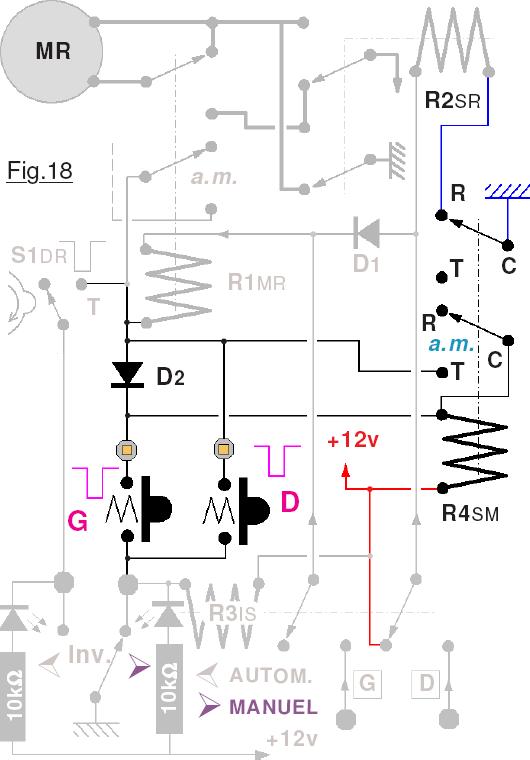 Chacun des deux boutons poussoir doit se substituer au système de l’HORLOGE pour générer les impulsions de « début » de mouvement. (Début car tant que le bouton poussoir étant activé le plateau tourne en continu.) Sur le schéma de la Fig.18 l’inverseur configure la machine en mode pilotage MANUEL. On remarque que le « point chaud » du relais R2SR qui croise les fils sur MR est bien alimenté en +12v comme c’est le cas en automatique quand la matrice valide D. Quand on active le bouton poussoir G, il fournit le niveau électrique GND au « point froid » du relais R4SM qui mémorise le Sens Manuel car il prend la configuration travail. (Voir explication en vert.) Le relais R2SR n’est alors plus polarisé au « point froid » du bobinage et passe au repos, ce qui correspond bien au cas G en configuration automatique. Quand on appui sur le bouton poussoir G on génère bien l’impulsion de « début » de mouvement, mais le niveau électrique GND ne doit pas « remonter » au point froid du relais R4SM. Pour interdire la propagation de GND on place la diode d’interdiction D2. Pourquoi mémoriser le sens ?
Chacun des deux boutons poussoir doit se substituer au système de l’HORLOGE pour générer les impulsions de « début » de mouvement. (Début car tant que le bouton poussoir étant activé le plateau tourne en continu.) Sur le schéma de la Fig.18 l’inverseur configure la machine en mode pilotage MANUEL. On remarque que le « point chaud » du relais R2SR qui croise les fils sur MR est bien alimenté en +12v comme c’est le cas en automatique quand la matrice valide D. Quand on active le bouton poussoir G, il fournit le niveau électrique GND au « point froid » du relais R4SM qui mémorise le Sens Manuel car il prend la configuration travail. (Voir explication en vert.) Le relais R2SR n’est alors plus polarisé au « point froid » du bobinage et passe au repos, ce qui correspond bien au cas G en configuration automatique. Quand on appui sur le bouton poussoir G on génère bien l’impulsion de « début » de mouvement, mais le niveau électrique GND ne doit pas « remonter » au point froid du relais R4SM. Pour interdire la propagation de GND on place la diode d’interdiction D2. Pourquoi mémoriser le sens ?
Tant que G est activé la plateau tourne, et R1MR par son auto maintien continue à faire tourner le moteur jusqu’à ce que le Switch de fin de mouvement soit repoussé au travail par la roue dentée. S’il n’y avait pas mémorisation avec a.m. le moteur inverserait son sens de rotation entre la fin du mouvement et le relâcher du bouton poussoir. Avec cet agencement, le plateau tourne aussi longtemps que l’on active G ou D et termine son mouvement jusqu’à détection d’une position angulaire d’un BIT.
♦ Le schéma complet du circuit de motorisation du carrousel.
Construire un schéma complet qui respecte tous les critères consiste à ajouter au circuit de la Fig.18 une diode électroluminescente en parallèle avec chaque bobinage des relais pour en visualiser l’état de pilotage. En outre, sur ce dessin les relais sont directement alimentés en +12v, mais nous savons qu’il faut introduire une résistance de 270Ω en série avec chaque bobinage pour abaisser la tension à 5V nominal. Enfin, moteurs et inductances devront se voir dotés des diodes de « roue libre » pour absorber les surtensions de coupure des flux magnétiques. Toutes ces modifications confondues aboutissent au schéma de la Fig.1 donné au recto de la fiche Circuit de la motorisation du carrousel n°1/4. Pour éviter d’encombrer inutilement le schéma, les diodes de roue-libre, les résistances pour adapter l’alimentation des bobinages en 5Vcc et les diodes électroluminescentes sont « banalisées » et ne sont donc par repérées. Deux fiches Recto / verso sont consacrées au schéma et au circuit imprimé de la motorisation du carrousel. La Fiche n°2/4 résume le fonctionnement de ce circuit et la mise en page est organisée pour que l’on puisse voir simultanément le schéma Fig.1 et les explications. Il semblerait que ce résumé sur le comportement du dispositif soit en doublon avec les développements du didacticiel. C’est un peu vrai. Ceci dit, dans le didacticiel il y a une approche progressive. Dans les fiches qui accompagnent en permanence la machine, les explications sont minimales pour optimiser ces dernières, tout en restant suffisantes pour assurer la maintenance sans avoir à remettre en service un ordinateur et fouiller avec agacement dans le didacticiel.
Enfin, pour terminer ces remarques, la désignation des éléments est systématique. Des fiches dédiées et nommées Repérage des divers composants fournissent une liste des nombreux sigles employés avec pour chacun un rapide aperçu de la fonction par sa référence sur la machine. Ces fiches sont également consultables simultanément avec les schémas et en facilitent la lecture.
La suite est ici : 03) Schéma électrotechnique de la fonction ÉCRITURE..


