


Concourir n'est pas le premier but mais en fin de compte pourquoi pas. Il ne faudrait pas fermer les portes à Pablo pour de nouvelles activités, ça serait dommage  .
.
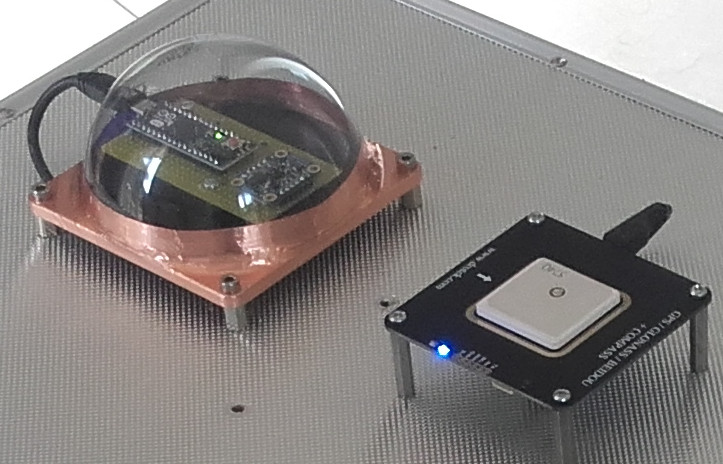
Côté GPS ( on devrait dire GNSS ) voici les capacités de Pablo à se repérer avec sa puce NEO M8N.
Une fois connecté par son câble USB, on peut recevoir les trames NMEA via un port série virtuel (un de plus).
$GNRMC,144447.00,A,4826.xxxxx,N,00204.xxxxx,W,0.008,,250916,,,D*7C
$GNVTG,,T,,M,0.008,N,0.014,K,D*35
$GNGGA,144447.00,4826.xxxxx,N,00204.xxxxx,W,2,12,0.65,136.3,M,48.1,M,,0000*5D
$GNGSA,A,3,11,01,22,03,14,08,17,32,23,28,19,,1.07,0.65,0.85*1F
$GNGSA,A,3,65,67,88,66,81,73,82,,,,,,1.07,0.65,0.85*11
$GPGSV,4,1,13,01,75,086,51,03,69,241,49,08,17,164,31,11,58,136,47*74
$GPGSV,4,2,13,14,38,063,44,17,35,309,46,19,15,318,35,22,88,107,49*75
$GPGSV,4,3,13,23,18,181,34,28,20,259,38,31,03,092,28,32,17,040,38*7E
$GPGSV,4,4,13,33,33,198,39*41
$GLGSV,2,1,08,65,41,041,45,66,77,214,49,67,22,218,36,73,08,345,30*64
$GLGSV,2,2,08,74,06,032,24,81,86,304,47,82,32,321,44,88,36,143,35*62
$GNGLL,4826.xxxxx,N,00204.xxxxx,W,144447.00,A,D*64
Sans décrire toutes les trames qui sont très bien expliquées sur des sites spécialisés, on reconnait celle qui nous intéresse pour se repérer : la trame $GNGCA.
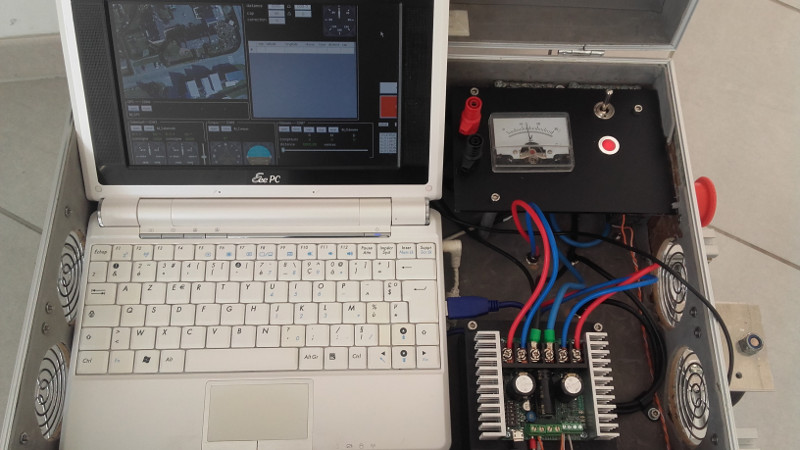
Grâce à GMAP.NET on peut visualiser l'emplacement sur une carte, bing map, google map, openstreet map ...
// Initialize map:
gmap.MapProvider = GMap.NET.MapProviders.BingSatelliteMapProvider.Instance;

Il est possible d'en savoir plus sur la position des satellites et les afficher. Ça n'apporte rien de plus à la localisation mais ça reste un bon exercice :
Les postions des 13 satellites GPS (américains) en vue :
$GPGSV,4,1,13,01,75,086,51,03,69,241,49,08,17,164,31,11,58,136,47*74
$GPGSV,4,2,13,14,38,063,44,17,35,309,46,19,15,318,35,22,88,107,49*75
$GPGSV,4,3,13,23,18,181,34,28,20,259,38,31,03,092,28,32,17,040,38*7E
$GPGSV,4,4,13,33,33,198,39*41
Les positions des 8 satellites GLONASS (russes) en vue :
$GLGSV,2,1,08,65,41,041,45,66,77,214,49,67,22,218,36,73,08,345,30*64
$GLGSV,2,2,08,74,06,032,24,81,86,304,47,82,32,321,44,88,36,143,35*62
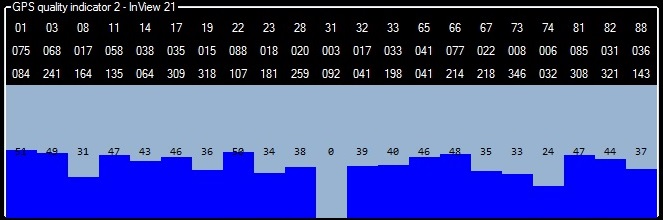
Avec quelques lignes de programme supplémentaires, on peut afficher l'ensemble des 21 satellites en vue ( numéro, élévation, azimut, SNR )
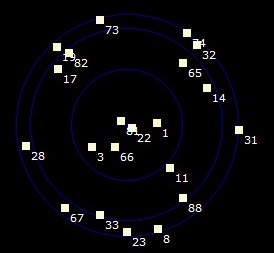
Les même informations, dans une carte du ciel :
On va donc maintenant pouvoir indiquer à Pablo une série de coordonnées à suivre.. dès qu'il aura retrouvé une batterie !






















![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)




