Pour ton bras, en faisant une étape initiale appropriée tu évites les collisions


Membre passionné


Posté 06 novembre 2017 - 08:57
Ce serait dommage d'avoir la précision d'un moteur pas à pas avec une calibration à main levé!
Pour ton bras, en faisant une étape initiale appropriée tu évites les collisions
Oui c'est vrai. J'ai des marquages spéciaux (d'origine) sur le bras pour tout aligner.
Made By Humans
Posté 12 novembre 2017 - 12:59
Je fais ce petit compte-rendu du live de ce soir sur discord, qui était illustré par mon expérience de Hector.
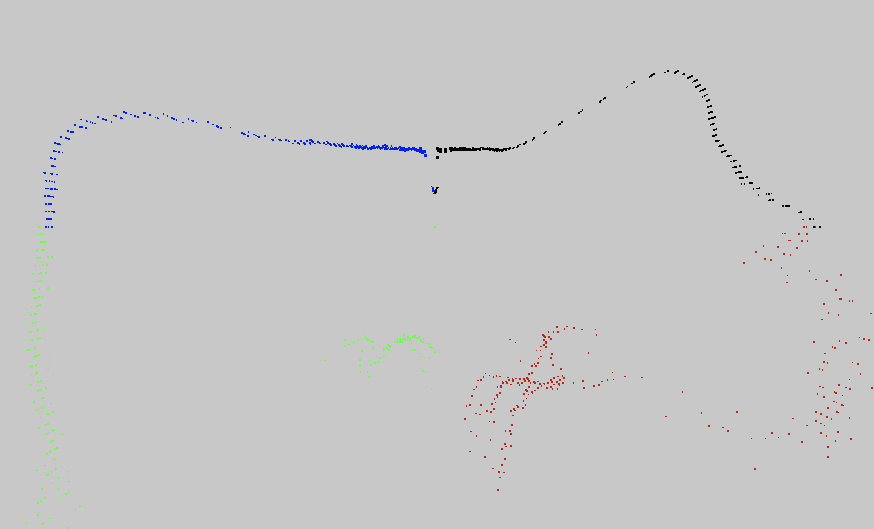
Je place Hector devant une surface plane et un profilé debout entre la surface et la tourelle.

J'obtiens ces mesures. Elles sont brut. Chaque point est une mesure.

On retrouve la surface plane entre le noir et le bleu. La pointe du V représente le profilé. Les jambes du V sont constituées de points fictifs dus au capteur. Celui-ci ne mesure pas un point précis comme le ferait un laser simple. La mesure est formée d'un cône qui explique les points intermédiaires entre le profilé et la surface placée derrière.
Je suis bien embêté avec ces points fictifs pour faire la cartographie ... Cela risque d'être bien complexe à éliminer.
Comme c'est un cône, je vais faire moins de mesures, cela ira plus rapidement à chaque passage. (Il faut voir les choses du bon coté.)
Je vais me concentrer sur la liaison de ces points et sur le tangent bug pour le faire avancer.
Merci Pascal !!
Membre passionné

Posté 14 novembre 2017 - 12:56
Modérateur et Membre passionné

Posté 14 novembre 2017 - 01:20
Made By Humans
Posté 14 novembre 2017 - 03:51
 J ai bien imaginé des algos pour éliminer les points fictifs. Avec des poids sur chacun cela implique de les mettre en cluster, de deviner que le point est fictif parce qu il n est pas detecter. Cela réduit le champ de vision car quid d un point bien réel qui sort du champ de vision ? Aussi avec la detection dun mouvevement des lignes ... Jai du mal à imaginer des algo viables pour mapper lenvironnement. Pour se déplacer en évitant les obstacles, ça doit convenir.
J ai bien imaginé des algos pour éliminer les points fictifs. Avec des poids sur chacun cela implique de les mettre en cluster, de deviner que le point est fictif parce qu il n est pas detecter. Cela réduit le champ de vision car quid d un point bien réel qui sort du champ de vision ? Aussi avec la detection dun mouvevement des lignes ... Jai du mal à imaginer des algo viables pour mapper lenvironnement. Pour se déplacer en évitant les obstacles, ça doit convenir.
Made By Humans
Posté 12 décembre 2017 - 08:43
Quelque nouvelles de ma tourelle. Ashira a bien résumé le problème des points fictifs que j'avais avec les VL53L0X montés sur un axe rotatif. A cela, il faut ajouter les angles formés par les murs étaient vus arrondis. Ce phénomène est causé par la forme conique du capteur. Ce capteur est pourtant très précis quand il est utilisé de manière statique.
Il me fallait une autre solution qui ne génère pas ces points fictifs. Je n'envisageais pas un algo pour les éliminer et retrouver les angles de mes murs.
J'ai commencé à dompter le rp lidar A2 du shop. Mes premiers essais avec les outils fournis montrent que je n'aurai plus les problèmes dénoncés plus haut.
J'ai branché le lidar directement sur la pi3 sans passer par le convertisseur usb. J'utilise le port série gpio et un des 2 pwm hardware de la pi.
Pour retrouver un port série performant sur la pi3, j'ai suivi les infos lus ici : http://www.framboise314.fr/le-port-serie-du-raspberry-pi-3-pas-simple/
Utiliser l’UART (le vrai !) en perdant la fonction Bluetooth. Il faut permuter les E/S des deux UART. Pour cela, ajoutez à /boot/config.txt : dtoverlay = pi3-disable-bt
Puis supprimer :
console=serial0,115200 dans cmdline.txt
J'obtiens bien ce changement :

Pour tester l'uart, comme indiqué dans l'article, j'ai relié le TX sur le RX de la pi avec une résistance.

Contrairement à l'article, j'ai testé en JS. J'utilise le module serialport https://www.npmjs.co...kage/serialport
const SerialPort = require('serialport');
const port = new SerialPort('/dev/ttyAMA0', {
autoOpen: false,
baudRate: 115200
});
const send = () => {
port.write('Je teste le port série 1 2 3 4 5', () => {
port.drain((err) => {
if (err) {
console.log(err);
return;
}
});
});
setTimeout(send, 1000);
}
port.on('open', () => {
console.log('Opened');
send();
});
port.on('data', (chunk) => {
console.log(chunk);
console.log(chunk.toString());
});
port.open((err) => {
if (err) {
console.log(err);
return;
}
});
Concernant l'utilisation du PWM pour piloter le moteur, j'ai utilisé le module pigpio https://www.npmjs.com/package/pigpio
C'est un wrapper du pilote gpio en C qui permet d'utiliser le PWM hardware.
const modulePigpio = require('pigpio');
const Gpio = modulePigpio.Gpio;
const motorPWM = new Gpio(18);
motorPWM.mode(Gpio.OUTPUT);
// duty = 1 000 000*60/100; -> 600 000
motorPWM.hardwarePwmWrite(25000, 600000);
Pour le challenge et voir jusqu'où on peut aller en NodeJS sur un raspberry PI3, j'ai décidé de refaire le driver 'from scratch' en javascript. Je vise les 4K mesures par seconde.
 LR001_SLAMTEC_rplidar_protocol_v1.0_en.pdf 1,46 Mo
1503 téléchargement(s)
LR001_SLAMTEC_rplidar_protocol_v1.0_en.pdf 1,46 Mo
1503 téléchargement(s)
Dans le protocole, on ne trouve rien pour piloter le moteur. C'est "neuneu". Sans le convertisseur USB, pour gérér le moteur, il suffit d'utiliser la commande MOTOCTL en PWM à 25kHz.
Pour le moment, j'ai codé les commandes, les réponses et leur analyse GET_HEALTH, GET_INFO. Salut, comment tu t'appel, comment tu vas ? Pas de problèmes particuliers. J'ai la commande EXPRESS_SCAN et la confirmation de son descripteur en réponse. Je lis les paquets 4K brut, il me reste à les analyser.
Habitué

Posté 12 décembre 2017 - 09:15
Génial j'ai hâte de voir les premiers tests : suivre une autre implémentation surtout full NodeJS me passionne aussi:)
J'utilise aussi le module SerialPort de Node, (quasi) obligatoire pour ce qu'on fait:)
J'avais envoyé ma logique de décodage du 2K et du 4K en C, mais ma 4K comporte un dernier bug d'angle courant/futur à corriger - bug qui fait deux "marches d'escalier" à un endroit dans la lecture qui semble fonctionner correctement hormis ça, faudra que je m'y re penche donc curieux de suivre ton avancement.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 12 décembre 2017 - 09:50
J'ai posté mon code ici, si ça te dit. https://github.com/P...ourelle-rplidar
C'est brut et en cours de dev. C'est pas fini.
Habitué
Posté 12 décembre 2017 - 10:36
Hop stared merci:D
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 17 décembre 2017 - 08:51
Bon !! Le code est posé. Il doit rester des pétouilles à corriger dans les calculs.
Toute la complexité est là. Le raspberry avale les trames 4K/s sans problème et en javascript.
Ne me demandez pas de compiler le cpp pour comparer, c'est certain que ça prend moins de cpu ^^
Héhé !!

Ça c'était le bon coté. J'ai quand même eu un pb qui m'a embêté toute l'aprem. : le calcul de la somme de contrôle. Dans la doc :
ChkSum Obtained by calculating the response data packet using XOR operation to each packet data byte and accumulating them together.
Je mets tout le packet, que les cabins, que les cabins et des packets du header ... rien à faire.
@Serveurperso, tu le fais ce calcul ?
Habitué
Posté 17 décembre 2017 - 09:58
Euh moi ça fonctionne le checksum...
checksum = premier & 0xF;
checksum |= second << 4;
sum ^= cabines;
if(sum != checksum) {
TXDEBUG.print(sum);
TXDEBUG.print(" != ");
TXDEBUG.println(checksum);
}
T'oublie pas un RAS de ton tmp (sum) ?
C'est forcément une connerie. Voici mon code qui fonctionne (ou il reste le fameux petit bug de old/courant/future angle)
bool readLidar() {
uint8_t current;
static uint8_t n = 0;
static uint8_t checksum;
static uint8_t sum = 0;
static uint16_t oldStartAngleq6;
static uint16_t startAngleq6 = 0;
static bool start;
static uint16_t diffAngleq6;
static uint8_t m = 0;
static uint8_t s = 0;
static int8_t derivAnglesq5[RPLIDARNBSAMPLES];
static uint16_t distances[RPLIDARNBSAMPLES];
float distance;
float angle;
static uint16_t j = 0;
float lidarx;
float lidary;
while(RXLIDAR.available()) {
current = RXLIDAR.read();
switch(n) {
case 0:
if(current >> 4 == 0xA) {
checksum = current & 0xF;
n = 1;
}
break;
case 1:
if(current >> 4 == 0x5) {
checksum |= current << 4;
n = 2;
} else
n = 0;
break;
case 2:
sum ^= current;
oldStartAngleq6 = startAngleq6;
startAngleq6 = current;
n++;
break;
case 3:
sum ^= current;
startAngleq6 |= (current & 0x7F) << 8;
start = current >> 7;
if(start)
TXDEBUG.println("start");
if(oldStartAngleq6 > startAngleq6)
diffAngleq6 = (360 << 6) + startAngleq6 - oldStartAngleq6;
else
diffAngleq6 = startAngleq6 - oldStartAngleq6;
for(uint8_t i = 0; i < RPLIDARNBSAMPLES; i++) {
distance = distances[i];
if(distance) { // Si la lecture est valide
//lidarReady = true; // Debug
angle = (float(oldStartAngleq6) + float(diffAngleq6) * float(i) / float(RPLIDARNBSAMPLES) - float(derivAnglesq5[i] << 1)) / 64.0 * PI / 180.0;;
lidarx = POSITIONLIDARX + distance * sin(angle);
lidary = POSITIONLIDARY + distance * -cos(angle);
if(lidarx > POSITIONSROBOTXMAX || lidarx < POSITIONSROBOTXMIN ||
lidary > POSITIONSROBOTYMAX || lidary < POSITIONSROBOTYMIN) { // Si la lecture est hors du robot
lidarsx[j] = int(lidarx);
lidarsy[j] = int(lidary);
lidarsCartex[j] = int(lidarx * cos(theta) + lidary * -sin(theta) + odometriex * 1000.0);
lidarsCartey[j] = int(lidarx * sin(theta) + lidary * cos(theta) - odometriey * 1000.0);
j++;
if(j == NBMESURESMAX)
j = 0;
}
}
}
n++;
break;
default:
sum ^= current;
n++;
switch(m) {
case 0:
derivAnglesq5[s] = (current & 3) << 6;
distances[s] = current >> 2;
m++;
break;
case 1:
distances[s] |= current << 6;
m++;
break;
case 2:
derivAnglesq5[s + 1] = (current & 3) << 6;
distances[s + 1] = current >> 2;
m++;
break;
case 3:
distances[s + 1] |= current << 6;
m++;
break;
case 4:
derivAnglesq5[s] |= (current & 0x0F) << 2;
derivAnglesq5[s + 1] |= (current & 0xF0) >> 2;
m = 0;
s += 2;
if(s == RPLIDARNBSAMPLES) {
if(sum != checksum) {
TXDEBUG.print(sum);
TXDEBUG.print(" != ");
TXDEBUG.println(checksum);
}
n = 0;
s = 0;
sum = 0;
}
break;
}
break;
}
}
}
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 18 décembre 2017 - 12:17
Merci. Si j'ai compris ton code, tu prends tous les octets du packet sauf les 2 premiers.
Je vais tester ça. Je crois pas l'avoir fait. C'est pourtant évident de pas prendre en compte les 2 qui contiennent le checkSum ...
Habitué
Posté 18 décembre 2017 - 12:24
Merci. Si j'ai compris ton code, tu prends tous les octets du packet sauf les 2 premiers.
Je vais tester ça. Je crois pas l'avoir fait. C'est pourtant évident de pas prendre en compte les 2 qui contiennent le checkSum ...
LOL imagine le checksum qui s'auto prend en compte lui même le brainfuck de l'algo checksum côté lidar !!! tu le prends en compte donc il change donc il faut le reprendre en compte donc il rechange etc...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Habitué
Posté 18 décembre 2017 - 12:26
hop mon robot à une roue asservie qui tourne c'est l’accouchement ! DODO
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 20 décembre 2017 - 09:55
Le checkSum passe nickel Je suis con des fois ^^
Donc avec le checksum, activé, le process nodeJS prend 15% du CPU.
Je continue.
Habitué
Posté 20 décembre 2017 - 10:05
Top !
Moi j'suis arrivé sur un grave problème de moteurs inutilisable pour mon type de projet sur le petit robot (ou la précision et la vitesse doivent aller de paire), j'ai du fedexer aux US pour ne pas être bloqué et dégouté pendant mes 2 semaines de congé.
J'ai mis un post plus complet ici http://www.robot-maker.com/forum/topic/11316-robot-pilotable-a-distance-via-internet-de-maniere-securise/page-3#entry91032
en résumé il faut un moteur qui tourne très vite avec une boite de réduction qui démultiplie fort - je suis passé de 34 à 100 mais je garde 150RPM sur l'arbre de sortie sans survolter le moteur!.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)









0 members, 0 guests, 0 anonymous users