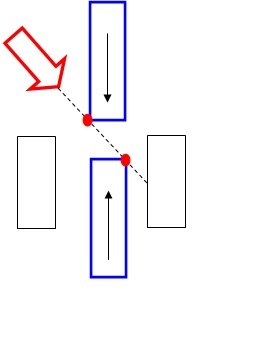
Par contre avec ton image je comprend qu'il faut détecter si on entre ou si on sort... Comment détectes tu que la personne est en train de rentrer ou de sortir ?
Moi dans ce que je t'ai proposé, tant qu'on est devant le capteur ça indique que la personne est dedans, ...
En gros je n'ai jamais le cas où ça boucle sur good bye ...
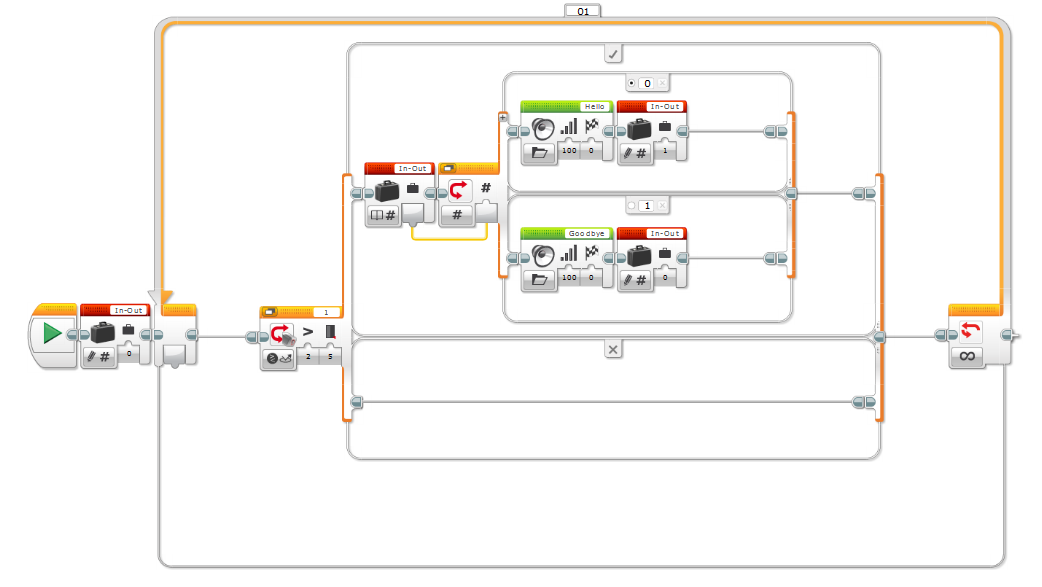
Behn en fait dans mon idée la première fois qu'on detecte c'est toujours "hello" qui est dit, a partir de la, le coup d'après c'est Goodbye et ensuite encore Hello, etc etc......
Si l'on veut que la première détection dise Goodbye, il suffit d'inverser la première condition du programme (je ne sais pas si je m'explique de façon compréhensible) ou alors encore plus simplement de passer la main une fois devant le capteur pour qu'il soit initialisé pour ensuite dire Goodbye.
Je suis en train de faire quelque test encore sur la dernière version de mon programme.
Est-ce que ici il y a quelqu'un qui éventuellement (si j'arrive a un programme fonctionnel) pourrait ensuite tester chez lui mon programme sur son Mindstorm pour me dire ce qu'il en pense et surtout s'il ne trouve pas de beugs de son côté ?




 ).
). )
)