Salut!
Désolé du délai de réponse ^^
Ma méthode repose sur deux points : les spécifications constructeur/documentations/recherches et des mesures.
En pratique, quand je parle de la conso du Atmega par exemple, c'est que je connais sa conso pour certaines tensions données,
à certaines fréquences.
Dans d'autres cas, je me base sur les données constructeur, qui indiquent par exemple x mA à 5V au max, donc je sais que j'aurai
cette conso au maximum. Du coup je surévalue parfois la conso, mais je pars justement toujours sur des valeur surévaluées si
je ne peux pas être précis pour avoir au final plus d'autonomie que prévu plutôt que le contraire

Par exemple pour mes moteurs, je sais que le courant de charge maximale est de 360mA, quand les moteurs sont bloqués.
Du coup, si le robot se déplace, c'est qu'il est en dessous du courant max de blocage, donc je sais que chaque moteur
consommera en réalité moins de 360mA.
Partant des données du couple, par exemple 1kg-cm, si j'ai des roues de 2cm, ça fait un couple de 500g. On peut donc
faire une estimation un peu à la louche, en disant que le moteur peut pousser une charge de 500g. En pratique, il peut pousser davantage,
car le poids s'exerce à la verticale, perpendiculairement, donc du coup il faut moins que 500g force pour déplacer 500g si on a une platforme roulante
(bien sur le frottement n'est pas non plus trop important).
Bref, si j'ai 2 moteurs, on dira donc 1kg de poussée, pour une masse de 200g, donc 1/5 de la charge max. Du coup je m'attends à avoir au plus
360*2/5=144mA, en sachant que c'est probablement surévalué pour un terrain plat.
Jusqu'à il y a peu, j'ai procédé ainsi, avec les imprécisions que ça apporte, car je n'avais pas d'ampèremetre. J'en ai maintenant un précis
jusqu'aux µA, donc du coup je peux mesurer la consommation typique attendue. Ce que je fais dans ce cas, c'est:
-mesurer la conso globale de la plateforme lors de l'activation de tous ou un sous ensemble des systèmes du robot
-et surtout mesurer la conso en charge de chaque sous système dans des conditions précises.
Par exemple, pour mon module radio 433mHz, j'ai fait un programme qui balance en continu des données, et je mesure la conso. Bien sur, ça fluctue, mais
on a pas des variations du genre 1mA puis 2mA. En général les variations sont plutôt du genre passer de 29 a 31mA, bref quelques pour cents. Dans ce cas,
je mesure le courant pendant un temps, et je garde la valeur la plus importante mesurée.
Pour cela je place mon ampèremètre en série, mais sur le +vcc du composant, ce qui me permet d'avoir sa conso exacte.
Selon les mesures, ça me donne des "classes" de conso. Si tous mes composants sont de l'ordre de quelques mA, et que j'ai un composant qui consomme des µA, alors celui ci sera dans la classe "négligeable". A moins que les autres composants tournent de façon sporadique, alors que celui la tourne en continu.
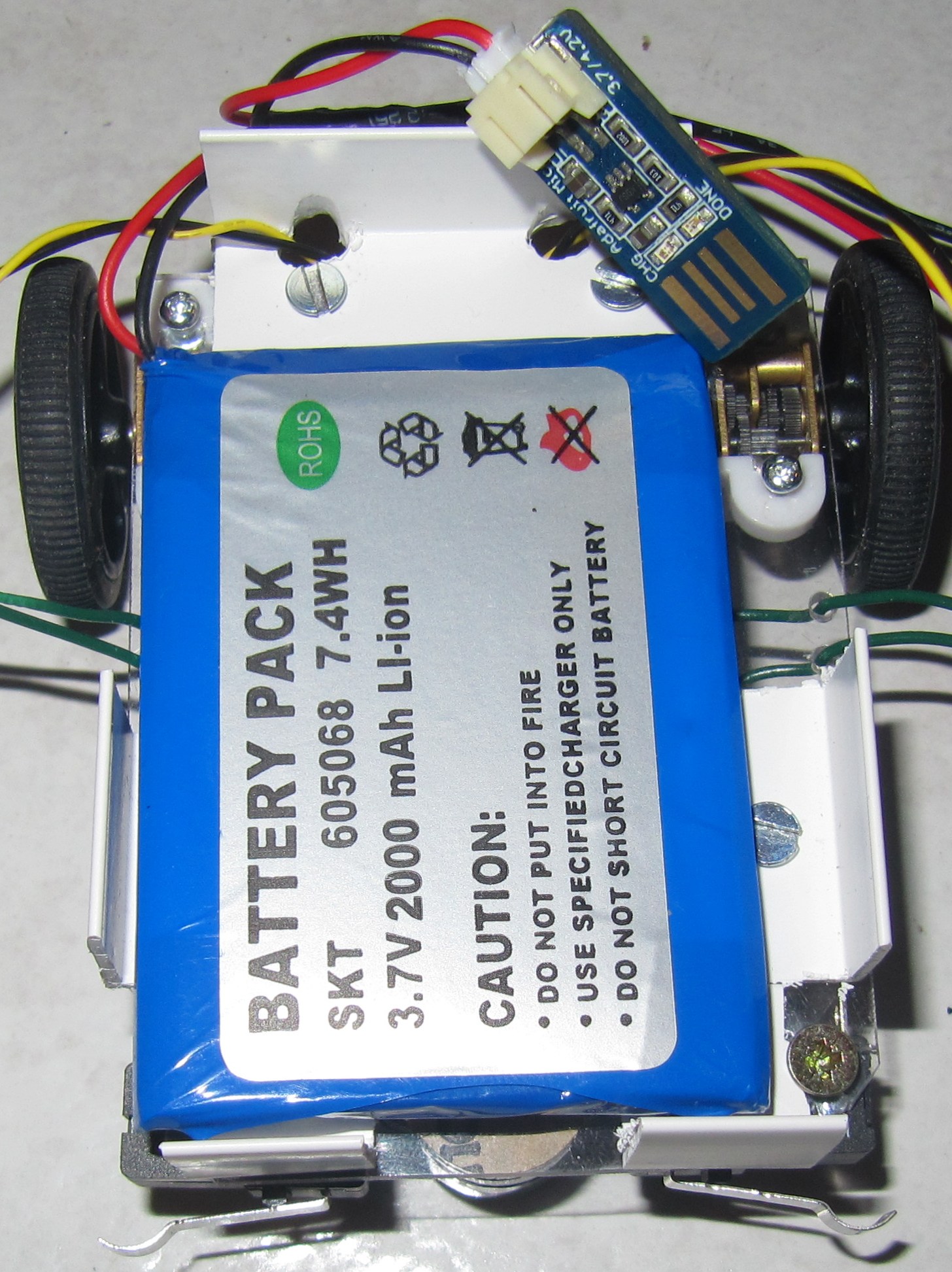
Maintenant, il faut savoir que la conso des composants dépend de la tension d'alimentation. La plupart du temps, un composant consommera moins à 3.3V qu'a 5V. Du coup avec une alimentation variable, je pars de la tension max. Par exemple pour une batterie LiIon non régulée, je mesure quand elle est chargée au max, donc a 4.2V. Cependant, la tension typique sera 3.7V, donc j'aurai en réalité une conso plus basse.
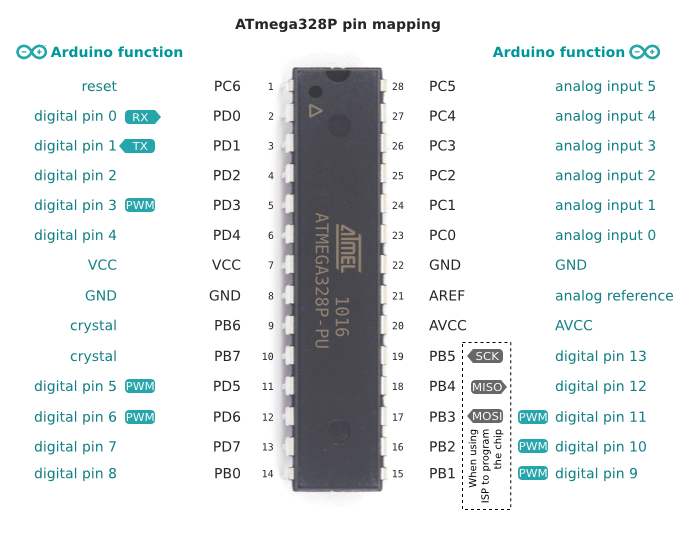
Pour le ATmega, j'ai des infos très précises provenant d'un super article de nick gammon que j'ai déja linké (et j'ai fait une version FR dans l'un des blogs sur ce site) qui donne plein de valeurs précises.
Pour les raisons, l'idée c'est aussi de pouvoir avoir une conso maîtrisée pour obtenir une autonomie réellement utile. Je trouve qu'un robot qui a 30 minutes d'autonomie, c'est bien pour un concours, ou des situations bien précises. Mais moi je suis intéressé par l'idée d'employer des robots pour faire des tâches en continu.
Donc déjà deux points :
-si j'ai un robot qui a une conso moyenne de 1Ah, avec une batterie liIon de 6Ah, j'ai bien sur 6h d'autonomie théorique, mais surtout je sais que je passe moins de temps en charge qu'en fonction. Si je charge a 2A, 1h de charge me donne 2h d'autonomie. Du coup je suis content, car je trouve insupportable de charger 12h pour avoir 30 minutes d'autonomie.
-Plus l'autonomie entre les charges est importante, moins il faut de robots pour avoir un service permanent. Si j'ai 8h d'autonomie, il me faut 3 charges pour faire 24h. Donc à moins de pouvoir s'assurer de recharger plus vite que je ne décharge, il me faudra 3 robots. Si je charge en moins de 8h, alors il me suffit d'en avoir 2.
Maintenant, si j'ai une conso négligeable devant la capacité de ma batterie, je peux me débrouiller pour avoir une charge très courte fournissant une grosse autonomie.
Ce robot par exemple, je peux le charger à 1A. Du coup, s'il consomme 100mA, j'ai 10h d'autonomie pour 1h de charge, et comme il consomme moins, ça veut dire qu'avec une courte charge je peux me débrouiller pour tenir facilement une journée.
Autre point, sur les très basses conso : si la conso est assez faible, je peux me débrouiller pour avoir une charge par panneau solaire PENDANT l'utilisation du robot. Du coup si le robot a un panneau solaire suffisant, il peut avec une journée de charge emmagasiner assez d'énergie pour un ou plusieurs jours sans soleil. Du coup, je me retrouve avec un robot toujours chargé, pouvant travailler sans interruption.
Enfin, il y a des aspects économiques et donc logiquement écologiques. Plus la conso est faible, plus la batterie dure longtemps, on est bien d'accord. Maintenant
ça implique que je fais moins de cycles de charge-décharge. Si ma batterie est donnée pour 300 cycles, si j'ai 8h d'autonomie, ça veut dire que la batterie sera
morte en seulement 100j. Si je passe à 24h, ça passe à 1an. 48h, 2ans. Changer une batterie au lithium tous les deux ans, c'est pas excessif, et je parle d'un robot qui fait une tache 24h/24, 7j/7, 365j/an.
Du coup si c'est plus économique, je dépense moins pour acheter des batteries, certes, mais mieux encore, je produis moins de déchets.
Donc si on parle du cout écologique, j'ai consommé moins d'énergie, donc moins d'émissions de co2, de rejets nucléaires ou autres, si on a pas d'énergie renouvelables,
mais surtout je coute moins à l'environnement, car je ne cause pas la production d'une batterie lithium. Ce n'est pas tout à fait vrai, mais si on fait tous ça, la demande baisse, donc la production aussi, et on pollue moins en production. Mais surtout je jette moins de batteries. Et quelle que soit la qualité du circuit de recyclage, je parie qu'il y a de la pollution avec ces produits chimique qui passe entre les mailles. Et si pas de recyclage, ça évite de mettre du lithium dans une décharge. Même en cas de recyclage complet, ça a un coût en transport, énergie de retraitement, etc...
Bref, sur le plan écologique, il y a souvent des conséquences indirectes plus importantes que les conséquences directes. Ainsi le cout de retraitement des déchets sera sans doute inférieur au cout de l'énergie gaspillée par un design gourmand
Enfin, moins de conso, ça veut dire plus d'autonomie, certes, mais aussi, si je consomme moins, j'ai plus d'énergie dispo pour intégrer tel ou tel module si besoin est