Le problème c'est qu'au vu de son montage il a besoin d'inverser le signal du deuxième servomoteur.
Par contre il existe justement des petits modules pour inverser le signal d'un servomoteur ... Quand tu as juste une radiocommande et 2 servo à piloter en sens inverse pourquoi pas mais quand tu utilises déjà un microcontrôleur programmable et que tu as des broches de disponible autant inverser le code dans ton microcontrôleur...
Sinon autre astuce : tu joins l'utile à l'agréable en liant mécaniquement tes deux servomoteurs de sorte à ce que si tu les bouge bien en même temps cela fasse le mouvement que tu souhaitais réaliser sur ton sumo, mais que si tu bouges tes servo en sens inverse ça joue sur l'angle de la pelle ...
Contenu de Mike118
Il y a 1000 élément(s) pour Mike118 (recherche limitée depuis 13-juin 13)
Par type de contenu
Voir pour ce membre
#119950 Naissance de mon Sumo
 Posté par
sur 27 novembre 2023 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 27 novembre 2023 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
#119946 Naissance de mon Sumo
Posté par
sur 26 novembre 2023 - 09:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour
J'ai un problème avec mon sumo avec la pelle devant et je pense en connaître la raison. La "pelle" est motorisée avec 2 servos , qui sont dont liés mécaniquement. En fait j'ai flingué un servo très rapidement. Je suppose que cela vient du mode de pilotage, qui consiste à les piloter l'un après l'autre , même degré par degré, ce qui met une contrainte sur le mécanisme et les deux servos.
Vous validez cette hypothèse ?
Erreur de débutant...
As tu bien calibré tes servomoteurs avant de les lier mécaniquement?
#119942 Naissance de mon Sumo
Posté par
sur 26 novembre 2023 - 02:59
dans
Robots roulants, chars à chenilles et autres machines sur roues
Exact !!! ce sont celles que j'ai achetées ici il me semble. Du coup je ne les ai jamais utilisées !
J'ai beaucoup utilisé des roues mecanum en effet , mais elles ont des dimensions trop importantes il faut moins de 26mm en largeur (tout compris). Avec ces roues je peux faire quoi, si je veux éviter d'acheter des roues mecanum plus petites ?
Pour l'usage des roues omniwheel, disposé comme tu l'avais fait ça permet de faciliter la rotation sur soit même ( ce que tu vas je pense vouloir éviter en sumo ... sinon à la moindre poussette ton robot va facilement pivoter sur lui même ) ... Par contre les même roues mais positionnées différemment peuvent te permettre d'avoir un robot omnidirectionnel... Tu peux faire une config à 3 roues positionnés à 120° ou bien à 4 roues positionnés à 90° les unes des autres ...
#119939 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur 24 novembre 2023 - 08:58
dans
Coupe de France de robotique / Eurobot
Bonjour à tous,
Cette année je participe à nouveau à la coupe de France de robotique, mais cette année je recommence avec une nouvelle équipe composée de
pat92fr hdumcke (que j'ai tous les deux rencontré lors de la TRR ) et moi même.
Pat à choisi le le nom de Marst Attacks! en référence au film éponyme, et par ce que le thème de l'année 2024 du règlement de la coupe de france de robotique, c'est " Farming Mars ". Il a été dévoilé en septembre 2023.
C'est la première participation de pat92fr et hdumcke, (donc oui c'est moi qui les ais embarqué dans ce traquenard, mais oui promis ils sont consentants et non pas séquestré  ) par conséquent on repart un peu du début, mais pas comme on est pas des débutant en robotique on va plutôt vite, et comme c'est la première fois qu'on travaille ensemble on prend un peu nos marques =). De plus comme ils sont tous les deux du côté de paris et que moi je suis dans le sud, du côté de biarritz on fait surtout des sessions en distanciels, cela n'aide pas forcément la chose mais ça va on s'en sort bien
) par conséquent on repart un peu du début, mais pas comme on est pas des débutant en robotique on va plutôt vite, et comme c'est la première fois qu'on travaille ensemble on prend un peu nos marques =). De plus comme ils sont tous les deux du côté de paris et que moi je suis dans le sud, du côté de biarritz on fait surtout des sessions en distanciels, cela n'aide pas forcément la chose mais ça va on s'en sort bien 
Pour faire un peu le point sur là où on en est pour le moment :
Mécaniquement :
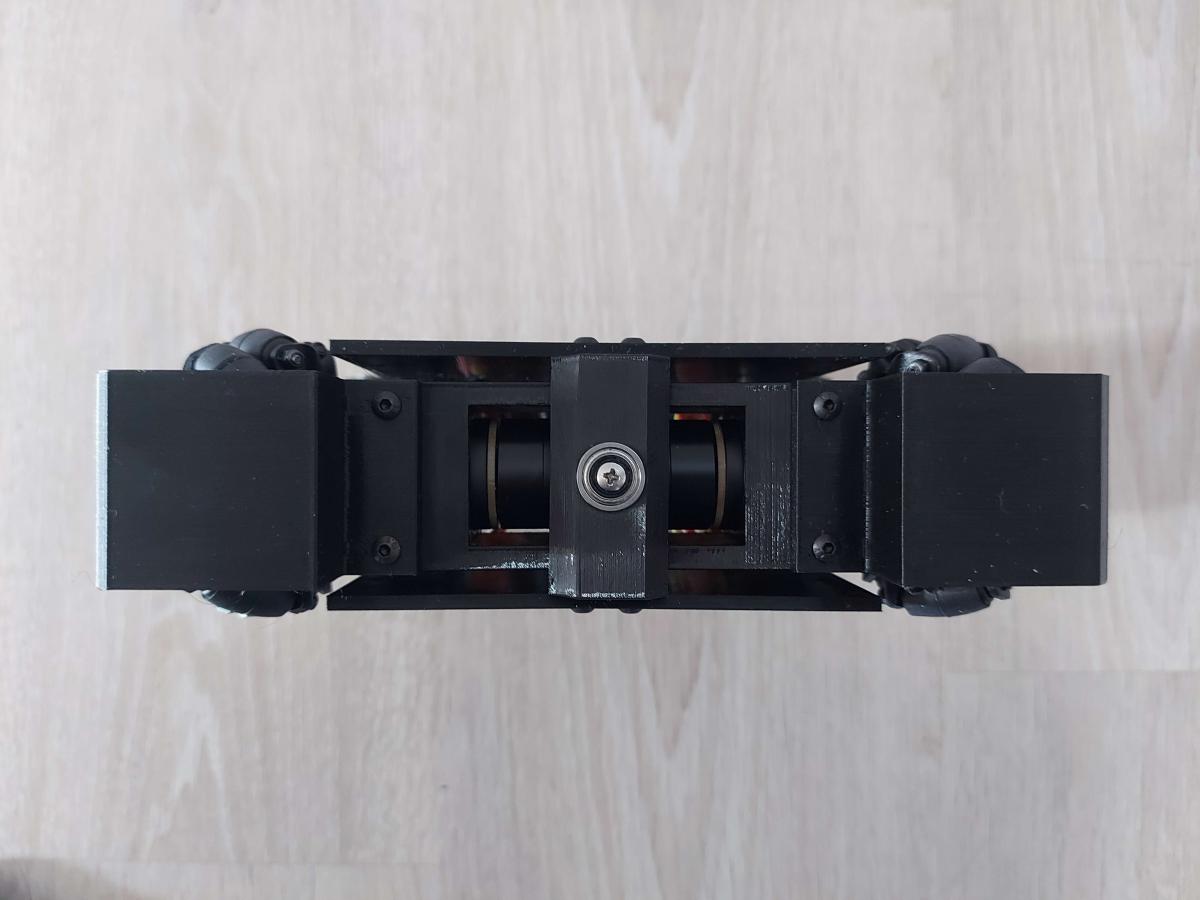
On part sur une base mecanum avec un lidar positionné assez bas de sorte à taper sur les bordures de la table pour se localiser ( mon expérience avec vigibot ) . Des contre axes sont ajoutés au niveau des roues dans le carrénage de protection pour soulager un peu les réducteur des moteurs et le train moteur avant est monté sur une liaison pivot afin d'avoir les 4 roues toujours parfaitement en contact sur le sol.
Quelques photo :
La base assemblée vue de dessus :

La base assemblée vue de face :
La mise en évidence de la liaison pivot du train avant sans les roues :

Vu de dessus du support moteur intégrant roulement et contre axe dans le carénage de roues :

Vu de face du support moteur intégrant roulement et contre axe dans le carénage de roues

Pour cette base mécanum de robot on utilise :
- 4 moteurs dji m2006 avec leur contrôleur C620
- 1 lot de 4 roues mecanum
- 8 roulements à collerette 8mm
ainsi que plusieurs pièces en imprimées en 3D (PETG) dont les fichiers seront partagées et pas mal de visserie.
Côté logiciel :
On a mis en place un outil de visualisation des données " en vue de dessus" qui permet entre autre de piloter le robot et de faire des logs.
On a mis en place un outil de visualisation des données " en vue de dessus" qui permet entre autre de piloter le robot et de faire des logs.
Cet outil de visualisation, développé en Java avec processing, peut aussi bien se connecter directement au robot pendant les tests qu'à d'autres outils de simulation qui ont également été développés
Voilà à quoi ressemble l'outil pour le moment :

Cet outil va être partagé avec différents exemple sur le github de l'outil de visualisation : ( Les exemples de base ont déjà été partagé, l'idée étant de fournir des briques afin que chacun puisse développer l'outil qui lui convient à partir d'exemples )
Côté code du robot :
Côté code du robot :
Côté code du robot, pour le moment on s'est concentré essentiellement sur le pilotage du robot et sa localisation sur la table. L'ensemble tourne sur un stm32 avec l'envoie des données vers le visualisateur se faisant en wifi avec un esp32.
On a un actuellement un ensemble qui tourne même si c'est pas encore parfait et qui est connecté à notre visualisateur.
Pendant les tests on obtient pour le moment ce genre de choses :
Dans cette vidéo on a un robot qui se déplace vraiment sur une table et ce qu'on voit c'est ce que le robot envoie comme données.
Il affiche où il pense être sur la table, et en rouge on voit les points lidar...
On peut voir que vers 1min50 le robot touche un obstacle et perds sa localisation... Il faut qu'on travaille la partie la détection des robots adverse, c'est en cours de dev mais les résultats sont déjà assez intéressant =).
On a prévu de publier pas mal de choses mais il faut encore qu'on avance donc je vous dit à bientôt pour la suite ! =)
mais les résultats sont déjà assez intéressant =). On a prévu de publier pas mal de choses mais il faut encore qu'on avance donc je vous dit à bientôt pour la suite ! =)
#119926 Naissance de mon Sumo
Posté par
sur 20 novembre 2023 - 01:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici la base, qui est déjà très compacte. il a fallu que je rabote les extrémités des moyeux des roues mecanum pour descendre à 100mm de largeur ! Et la longueur, compte tenu du diamètre des roues est déjà à 96 mm ! Et là pas possible de loger les batteries sous le robot !
Pour l'instant c'est du 100% compatible Lego, les roues et les servomoteurs (Geekservo)

ça ce sont des roues omniwheels et non pas des roues mécanum et disposé ainsi ça ne te permettra pas de translater "en crabe "
#119914 Naissance de mon Sumo
Posté par
sur 18 novembre 2023 - 02:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
ça, c'est du cube !
Si je comprends bien, tu optes pour le principe du bulldozer.
La pelle est motorisée ?
Oui visiblement la pelle est motorisée avec un petit servomoteur.
#119894 PID - un banc de test
Posté par
sur 13 novembre 2023 - 10:33
dans
Programmation
Et plutôt que d'utiliser un Arduino Nano et un Breadboard, j'ai préféré un Arduino Uno qui permet de fixer un petit câble de connexions entre ces deux pins.
Difficile de faire plus minimaliste pour se lancer dans l'étude du PID.
Tu aurais pu utiliser une nano et mettre un fil femelle femelle
En changeant de pin et en prenant le pin 3 à la place du 12 tu aurais même pu mettre un simple cavalier entre 2 et 3 vu qu'ils sont côte à côte
Ensuite si tu veux quelque chose d'un peu plus " drôle " tu peux choisir une broche PWM ( comme par hasard 3 est aussi une broche PWM ) et chercher à modifier la valeur de pwm pour avoir un temps à l'état haut qui correspond à ce que tu souhaites ( par contre oui dans ce cas il va te falloir mettre ton interruption en " CHANGE " et non plus en RISING ... Et bien compter que le temps à l'état haut dans ton interruption ... ) Il va aussi peut être te falloir changer la fréquence de PWM sur le Timer 2 dans ce cas ... Bref tu peux éventuellement proposer cela dans un deuxième temps
#119872 Robot à chenille téléguidé
Posté par
sur 08 novembre 2023 - 01:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Et par pitié, évite la famille des L298 : c'est des antiquités avec des performances horribles (https://www.st.com/r...asheet/l298.pdf) : à 1A, tu as entre 1.8V et 3.2V de perdu dans le pont en H, à 2A tu peux perdre jusqu'à 4.9V de tension. Toute cette tension est dissipée en chaleur, donc il faut refroidir le L298 (et tu vides inutilement ta batterie).
@Mike : pourquoi continuer à vendre un composant aussi antique? (il semblerait qu'il existait déjà au milieu des années 70 (https://forum.arduin...98-age/480905/2), c'est à dire quand mes parents étaient des gosses!)
Je suis d'accord pour dire que le L298 c'est pas le top du top et que c'est pas celui que je recommande le plus, ( d'ailleurs j'en ai à peine 25 en stock sur 3 références ... alors que j'ai plus de 50 pcs sur une seule référence pour d'autres produits de la même famille) mais c'est un produit qui est moins cher que pas mal d'autre solution, et "plus costaud " que d'autres solution ( plus costaud que le TB6612fng ) ... De plus il est fournit sur des cartes avec un forme factor intéressant et est présent dans de nombreux tutoriels ce qui en fait un produit demandé ... C'est un peu la loi de l'offre qui s'ajuste à la demande ...
Par contre d'expérience il est pas si " horrible que tu le dis " ... Pour du 2A il chauffe pas tant que ça ... Il est largement utilisable... Plus utilisable que le TB6612FNG ...
D'ailleurs sur un projet j'ai fini par remplacer les TB6612FNG qui étaient prévu initialement par des L298 carle client réussissait à suffisamment forcer sur ses moteurs ( qui étaient prévu pour 1A max en condition normale ) et réussissait à cramer le TB6612FNG ... Après remplacement plus de soucis ...
Bref pour un meilleur rendement et pas trop de courant et pas trop cher il y a des nouvelles références qui marchent bien, mais si tu veux un truc solide, pas cher et que le rendement c'est pas ta priorité N°1 , le l298 a encore selon moi une petite place ... En 70 le matériel fabriqué à cette époque il était encore costaud... Je suis sûr qu'il sera encore utilisé dans 50 ans ce composant ... x)
Après si tu me recommandes d'autres driver de moteur pour la plage de 3A en continue, qui sont costaud est pas cher ( genre 6€ 7€ max ) je suis preneur de référence pour remplacer le L298 ...
#119861 Naissance de mon Sumo
Posté par
sur 07 novembre 2023 - 04:40
dans
Robots roulants, chars à chenilles et autres machines sur roues
* Un "agile" que j'imagine avec des roues mécanum
Je suis un très grand fan des roues mécanum mais typiquement les compétitions sumo c'est vraiment un cas où je n'utiliserais pas ce type de roues ...
#119761 Robot à chenille téléguidé
Posté par
sur 31 octobre 2023 - 03:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ok, donc si tu as déjà fait des petits projets en effet c'est sans doute le bon moment pour passer sur plus gros
Pour vigibot, Il te suffit d'une raspberry pi 3A+ et d'une camera, même pas besoin d'arduino ni de faire de code Tu as juste besoin de te concentrer sur la méca et l'élec de ton projet !
#119759 Robot à chenille téléguidé
Posté par
sur 31 octobre 2023 - 11:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bienvenu ! =)
Un budget de 120€ c'est vraiment pas beaucoup... Si le but c'est d'apprendre je recommande vraiment de commencer par tout un petit robot...
Au vu du budget, même si tu veux faire de la récupération, faire un char avec des pneus de vélo me paraît peu adapté ...
Il va te falloir de gros moteurs, une mécanique solide etc ...
Tu pourrais beaucoup plus facilement te faire un petit robot avec ce genre de chenille , des moteurs N20 ... et un peu d'impression 3D... Voir même commencé en hackant une petite voiture électrique afin de un petit robot d'exploration ...
Ainsi Tu vas pouvoir apprendre énormément de choses qui te permettront d'appréhender plus sereinement ton projet de grand robot lorsque tu auras le budget qui convient pour le projet ...
Au passage peut être que le projet vigibot pourra t'intéresser
Le but de ma remarque c'est pas de te décourager bien au contraire. Je te partage juste mon avis car d'expérience faire un projet trop grand, trop compliqué, sans expérience, sans budget suffisant c'est souvent très consommateur de temps et le risque c'est de se décourager trop vite avant même d'avoir réussi à finir le projet ...
Le but de commencer par un projet plus petit, c'est d'avoir un projet que tu pourras finir pour acquérir de l'expérience... pour par la suite réussir à mener à bien complètement ton projet sans te décourager.
En tout cas le faire ainsi te donne à mon avis de bien meilleurs chances de succès ... Mais ce n'est que mon avis, libre à toi de faire comme tu veux et quelque soit ton choix le forum sera là pour t'aider et essayer de répondre à tes questions.
#119753 Naissance de mon quadripède
Posté par
sur 30 octobre 2023 - 09:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le seul truc un peu dommage du roulement anti retour c'est que le robot risque d'avoir du mal à faire une marche arrière.
Et je suppose qu'il va tourner un peu moins bien mais ça ça reste à vérifier
Mais ces inconvénients ne sont pas importants pour une course de vitesse en ligne droite
En tout cas super progression
#119743 Lidar rotatif
Posté par
sur 29 octobre 2023 - 03:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux faire la même chose avec le LD06 que ce que tu fais avec ton rp lidar :
Tu branches le lidar à ta mega et tu décodes la trame sur ta mega (normalement la librairie lD06 que j'ai donnée plus haut fonctionne avec la mega, hésite pas à faire un retour ) puis tu filtres les données et tu envoies en usb juste les données qui te conviennent ... ( comme ce que tu faisais avant ... )
#119735 Lidar rotatif
Posté par
sur 28 octobre 2023 - 06:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Peux tu me dire exactement ce que tu veux faire avec ton lidar connecté au PC ?
Quels sont les données que tu aimerais recevoir ?
Sous quel format ?
#119731 Lidar rotatif
Posté par
sur 28 octobre 2023 - 03:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je ne l'utilise habituellement pas directement sur un PC, mais je l'utilise avec cette librairie https://github.com/R...-Maker-SAS/LD06
avec microcontrôleur, et le microcontrôleur je le branche en usb sur le PC et je visualise les données avec téléplot.
Si ton but c'est de faire ta propre appli PC, tu peux regarder la lib pour " copier " la partie décodage des information...
Sinon un de ces quatre il faudrait que je mette à jour cet outil : https://github.com/Robot-Maker-SAS/Simple-Processing-Robot-Simulator/
pour justement fournir le code qui peut permettre d'afficher les points lidars de ce lidar ... Actuellement il faudra combiner l'exemple série avec la lib LD06...
Sur la boutique on fournit aussi le lidar LD06
#119718 Loomie et les Robots en tournée à Lyon jusqu'au 4 novembre 2023
Posté par
sur 26 octobre 2023 - 05:33
dans
Cinéma, littérature, philosophie
Une super pièce de théâtre n'hésitez pas à y aller ! Robot Maker a même participé sur certains robots du spectacle ! =)
#119666 Blabla divers
Posté par
sur 19 octobre 2023 - 12:50
dans
Bric-à-brac
Oui avec l'AMS.
Seul retour " pas top avec l'ams " : L'ams marche super bien avec les bobines bambulab, par contre il peut y avoir des fabricants qui font des bobines un peu plus large ou autre et après ça fonctionne pas avec si la bobine est trop large ...
#119665 Projet miniature avec écran transparent
Posté par
sur 19 octobre 2023 - 12:47
dans
Conseils et aide aux débutants, livres et kits en robotique
Je suis pas nouveau mais je suis toujours là, par contre j'ai pas plus d'eau à apporter au moulin ^^
#119661 Blabla divers
Posté par
sur 18 octobre 2023 - 10:38
dans
Bric-à-brac
Je ne les ais pas testé personnellement mais j'en ai eu d'excellents retours.
#119577 Naissance de mon quadripède
Posté par
sur 06 octobre 2023 - 11:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Fait comme Oracid, un programme qui ne fonctionne que 10 secondes au moins il s'arrêtera tout seul =)
#119503 Naissance de mon quadripède
Posté par
sur 26 septembre 2023 - 12:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu parles de ces servomoteurs : https://www.robot-ma...kservo-585.html?
Ces servo ont la particularité d'être 0-360°
Là où tes autres servo sont censé être 0 180° voir 0 270° ( à vérifier )
Donc techniquement tu ne peux pas mettre exactement le même code il faut au moins un peut de calibration ...( Après j'enfonce peut être une porte ouverte et tu as peut être déjà fait cette étape )
Avant de monter tes servo sur un autre quadrupède je t'encourage à les tester unitairement en les comparants avec les geek servo.
Il faudrait que lorsque tu envois une même consigne d'angle en degrés, tes différents servo aillent physiquement à la même position ...
#119434 Controller un moteur en PWM avec un PC portable
Posté par
sur 17 septembre 2023 - 12:49
dans
Electronique
Merci pour vos réponses!
En fait je voulais dire directement via USB, l'USB envoie du 5v et par un programme j'éteins le port et le rallume pour faire un signale PWM, je sais que je peux l'éteindre et l'allumer à ma guise mais est ce que ça peut se faire à des fréquences PWM ?
Je me rappel m'être exactement posé ce genre de question quand je ne savais pas encore programmé =)
Cela n'est pas disponible tel quel sur ton pc ( du moins à ma connaissance ce n'est pas intégré par défaut sur les prises usb des pc ) mais comme le dit Sandro, tu peux ajouter un module qui te permettra d'avoir la fonctionnalité en question.
Oracid t'a montré un exemple
Tu peux même fabriquer toi même la chose dans un câble par exemple ...
Un moyen de le faire : Un microcontrôleur ( de petite taille genre : https://www.robot-ma...rp2040-533.html) et un mosfet.
Et tu mets un code dans le microcontrôleur de sorte à piloter le mosfet en fonction des commandes reçues ...
#119393 Algorithme de prédiction utilisant les réseaux de neurones
Posté par
sur 13 septembre 2023 - 10:36
dans
Programmation
Personnellement je ne suis pas sûr de bien comprendre ce que tu cherches.
#119374 Piloter 2 moteurs avec contrôleur Sabertooth 2X32
Posté par
sur 10 septembre 2023 - 03:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui j'ai déjà utilisé.
Il faut bien lire la doc pour bien savoir comment configurer les switch et ça marche très bien après =)
#119370 Salut salut
Posté par
sur 09 septembre 2023 - 06:41
dans
Et si vous vous présentiez?
Welcome!




