Question de dernières minutes, sur Robot Shop la 2x32a et moins chère que la 2x25A de presque rien mais à votre avis la programmation sera identique ou est-ce deux types de carte complètement opposées.
Contenu de Gyro49
Il y a 244 élément(s) pour Gyro49 (recherche limitée depuis 18-juin 13)
Par type de contenu
Voir pour ce membre
#94220 Sabertooth ou Syren
 Posté par
sur 09 avril 2018 - 12:29
dans
Electronique
Posté par
sur 09 avril 2018 - 12:29
dans
Electronique
#67472 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 23 février 2016 - 12:03
dans
Machines de fabrication
Bonjour
Pour une CNC laser j'avais ça en stock
Si tu veux j'ai fait une CNC format légèrement inférieur au A3 pour 150 euros.
Les photos ce week end.
Pour la fixation des moteurs sur les tiges filletées voir le post
Cordialement
#67593 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 05:25
dans
Machines de fabrication
Bonjour,
Je suis de retour avec ma CNC entièrement bricolage maison
Donc pour 150 euros:
1 raspberry (35 euros)
1 Atmega 328p avec son quartz 16MHz et ses deux condensateur (5 euros)
3 moteurs pas-à-pas (3x15euros)
3 Contrôleurs de Moteur Pas-à-Pas EasyDriver (3x10 euros)
1 alimentation 12 v (récup sinon 15 euros sur amazon)
Tube acier diamètre 20 mm de chez brico dépot 4x1.00
Tige filleté de 8 mm de chez brico dépot 2x0.80euro
Tige filleté de 6 mm de chez brico dépot 1x0.80euro
équerre alu (pour les chariots de déplacement) bricot dépot
Roulement à bille de Roller de chez Décathlon
les chevilles laiton et les entretoise sont de leroy merlin
Sinon le bois c'est de la récup.
Les ressorts récup garagiste
option:
-un boitier CPL 15 à 20 euros permet d'envoyer par réseau de mon buerau à l'autre bout du sous-sol les GCode à réaliser.
Ci-dessous la CNC et son boitier gris de controle
Ci-dessous la tige filletée (8mm) de déplacement et écrou allongé (entretoise) et son ressort pour limiter les jeux et l'écrou papillon

Ci dessous l'un des deux rails de dépaclement par axe la tige filletée de 6mm sert à faire la tension sur les roulements

Pour finir mon boitier de contrôle
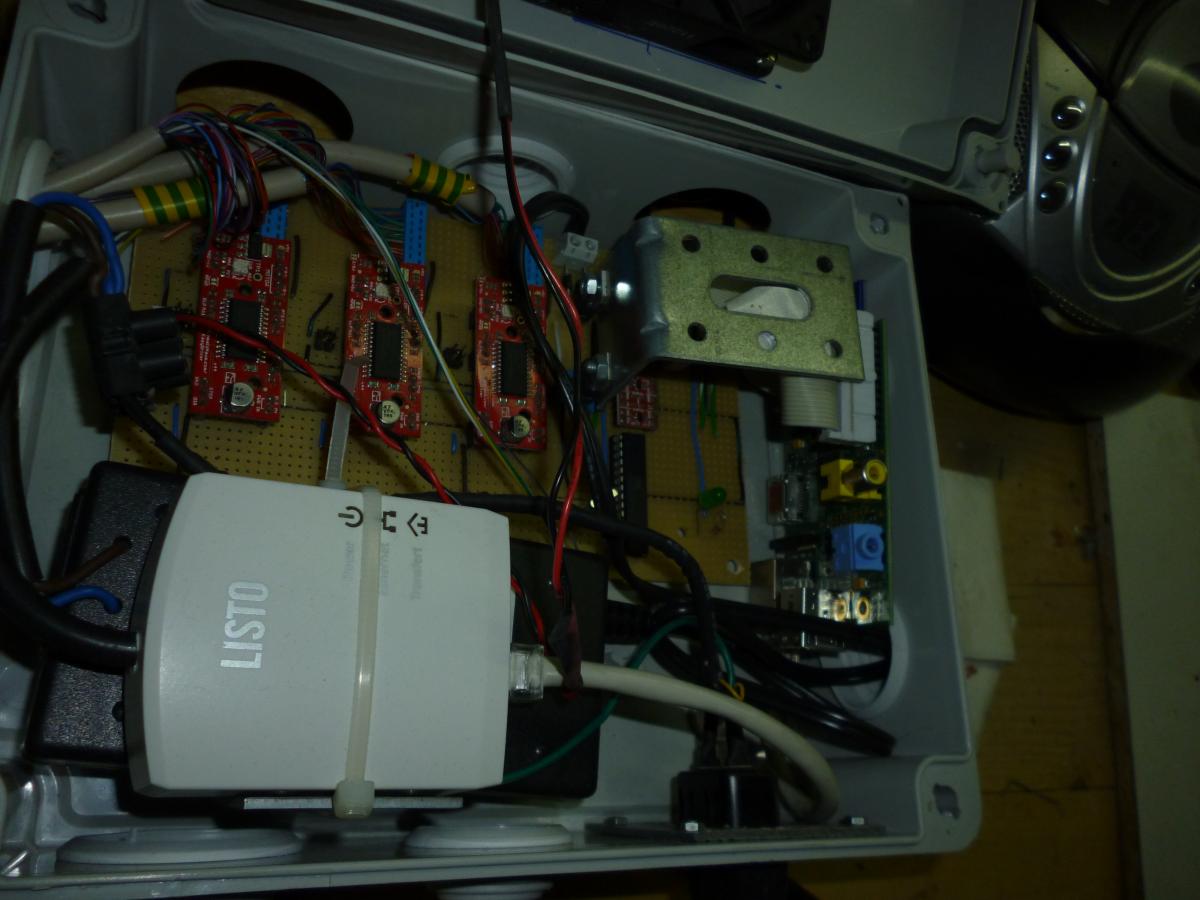
Donc la raspberry pousse dans l'atmega ligne après ligne du gcode via la connexion RX / TX
pour le script python le lien
Pour l'Atmega j'ai suivi cette méthode
Bon c'est vrai je suis plus vers les 170 euros.
A bientôt
#67605 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 07:43
dans
Machines de fabrication
Oups j'ai bien une photo global que j'ai oubliè

#67722 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 09:25
dans
Machines de fabrication
#67725 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 12:24
dans
Machines de fabrication
En effet les connecteurs ne sont pas fait pour ça, mais il supportent bien la charge.
J'ai un peu triché, comme c'est des DB25, j'utilise une paire pour un signal, doncpour les 6 fils du moteur j'utilise 12 fils du cable imprimante.
Pour la question du jeu, je n'ai rien remarqué, maintenant l'utilisation c'est :
-gravure de PCB
-usinage de PVC, il faut être patient et ne pas trop en demander à chaque passe.
J'ai l'intention de ma faire une imprimante 3D, donc je vais commander de plus gros moteurs pour la CNC et échange avec la 3D
A y refaire, je mettrais mes controleurs plus près des moteurs.
#76526 Roues pour robot mobile.
Posté par
sur 22 novembre 2016 - 05:40
dans
Mécanique
Bonsoir,
Pour les roues Rouge de Chez Leroy Merlin, il n'y a pas de roulement mais les mêmes chez Brico dépot ont des roulements....
Pour les fixations il devrait y avoir un tutoriel avant la fin d'année si tout se passe bien.
A bientôt
#103617 Robot tondeuse.
Posté par
sur 23 mai 2019 - 09:53
dans
Robots domestiques, robots d'entretien
Bon c'est vraiment un scoop alors personne ne me prend l'idée avant environ deux semaines... sinon je boude.
A la recherche du gabarit
Reste la partie électronique

Donc il me reste à régler mon problème de drivers L298N qui surchauffe
Je retour sur le fer à souder
#103588 Robot tondeuse.
Posté par
sur 22 mai 2019 - 06:57
dans
Robots domestiques, robots d'entretien
Bonjour
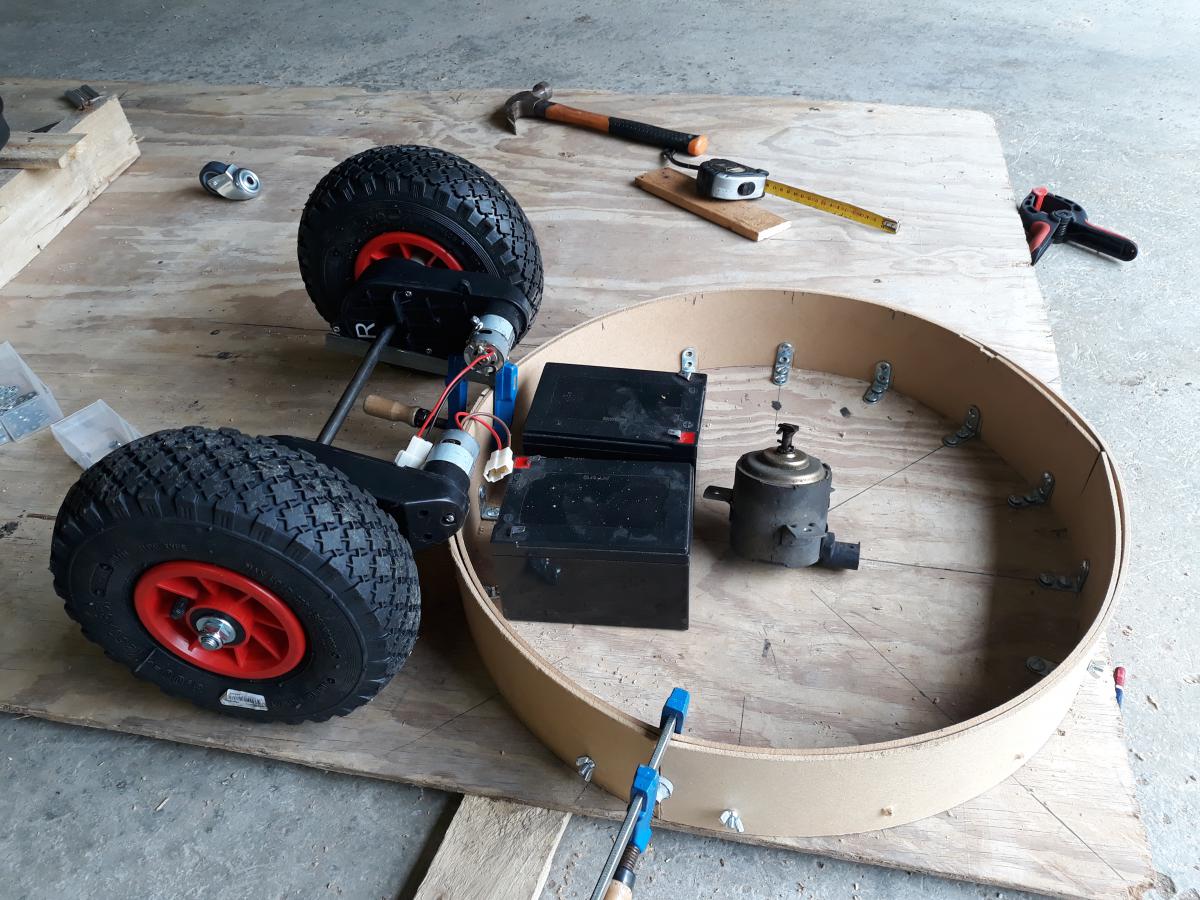
Je suis justement sur projet de robot tondeuse.
J'ai bloqué pendant deux semaines sur les contrôleurs moteurs mais j'ai la solution.
Châssis terminé, les enfants à l'école... dernière soudure aujourd'hui j'espère.
La version 1 ne sera pas autonome.
#55037 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 11:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
Pour les capteur tu as les capteurs en lignes
http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-110&lang=fr-CA
ou à faire
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
@+
Gyro49
Pour les capteur tu as les capteurs en lignes
http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-110&lang=fr-CA
ou à faire
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
@+
Gyro49
#53437 robot suiveur de ligne
Posté par
sur 10 février 2013 - 10:42
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour,
Je vais juste te donner le point de départ.
http://fribotte.free.fr/bdtech/pic/servoCC.html
Les servos en directe sur une carte Arduino fonctionnent parfaitement.
Bonne chance
Je vais juste te donner le point de départ.
http://fribotte.free.fr/bdtech/pic/servoCC.html
Les servos en directe sur une carte Arduino fonctionnent parfaitement.
Bonne chance
#62891 Robot réponse vocale (SVI)
Posté par
sur 28 novembre 2014 - 11:05
dans
Programmation
Bonsoir,
Ca fait bien longtemps que je n'ai pas posté un commentaire, mais comme je suis sur un projet de reconnaissance vocale, je donne mes liens
YURI ->
JASPER ->http://www.semageek.com/diy-creer-votre-propre-jarvis-avec-un-raspberry-pi-et-jasper/
SARAH -http://bibabox.fr/le-controle-vocal-avec-raspberry-pi-s-a-r-a-h/
C'est certainement accessible à tous, maintenant amazon c'est mis à vendre les carte raspberry sans frais de port.
A bientôt
#79301 Robot Quadrupède intelligent.
Posté par
sur 16 février 2017 - 12:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je ne veux pas casser l'ambiance, mais des lasers qui font des trous sont à utiliser avec beaucoup de prudence.
Je viens d'avoir l'information qu'un enfant à perdu un oeil avec un joué de fête foraine suite à un tir dans un miroir qui lui a donc renvoyé le faisceau.
Sinon, génial idée
Je viens d'avoir l'information qu'un enfant à perdu un oeil avec un joué de fête foraine suite à un tir dans un miroir qui lui a donc renvoyé le faisceau.
Sinon, génial idée
#57542 robot pour bibliothéque
Posté par
sur 21 août 2013 - 04:25
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Une Raspberry avec sa caméra board 5M pourrait faire le bonheur du projet.
Solution possible
Bonne chance
Une Raspberry avec sa caméra board 5M pourrait faire le bonheur du projet.
Solution possible
Bonne chance
#57306 Robot parlant
Posté par
sur 02 août 2013 - 11:20
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour,
Tu es à l'heure exacte pour ton sujet.
Je n'ai pas encore essayé, mais il me semble que c'est possible grâce au lien ci dessous
http://boutique.ed-diamond.com/linux-pratique/482-lp78.html
L'article (la revue est toujours en vente) propose de rédiger les phrases dans un fichier ".txt" et qu'un programme interprète le texte.
Je le tenter pendant le mois d'aout sur ma RPi.
C'est le début d'un Nabaztag
A bientôt
Tu es à l'heure exacte pour ton sujet.
Je n'ai pas encore essayé, mais il me semble que c'est possible grâce au lien ci dessous
http://boutique.ed-diamond.com/linux-pratique/482-lp78.html
L'article (la revue est toujours en vente) propose de rédiger les phrases dans un fichier ".txt" et qu'un programme interprète le texte.
Je le tenter pendant le mois d'aout sur ma RPi.
C'est le début d'un Nabaztag
A bientôt
#57600 Robot parlant
Posté par
sur 27 août 2013 - 07:50
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour,
J'ai donc essayé Espeak et MBROLA.
Espeak s'installe facilement mais fonctionne bizarrement, il n'accepte pas la voix mb/mb-fr1.
Par la force des choses MBROLA n'arrive pas à lire le fichier des phonèmes.
Sinon c'est génial, je vais essayer de coupler espeak avec ma webradio pour me faire une sorte de JARVIS (iron man)
Il me signalera les dysfonctionnements ou fonctions qu'il aura sous sa surveillance tout en me coupant la radio avant, une forme de Nabaztag à ma sauce.
A bientôt
J'ai donc essayé Espeak et MBROLA.
Espeak s'installe facilement mais fonctionne bizarrement, il n'accepte pas la voix mb/mb-fr1.
Par la force des choses MBROLA n'arrive pas à lire le fichier des phonèmes.
Sinon c'est génial, je vais essayer de coupler espeak avec ma webradio pour me faire une sorte de JARVIS (iron man)
Il me signalera les dysfonctionnements ou fonctions qu'il aura sous sa surveillance tout en me coupant la radio avant, une forme de Nabaztag à ma sauce.
A bientôt
#57339 Robot parlant
Posté par
sur 03 août 2013 - 09:06
dans
Conseils et aide aux débutants, livres et kits en robotique
Ces logiciels peuvent être utilisés de manière a en arriver à ce que je cherche à faire ?
Bonsoir,
Je penses que oui, à la place de faire un fichier son pour chaque situation tu passe un texte dans le logiciel qui parlera à ta place.
Maintenant il faut faire des tests :
-poids des fichiers son
-poids des logiciels de text to speech + poids des fichiers txt ou bash
faut essayer
#65719 Robot labyrinthe
Posté par
sur 02 novembre 2015 - 08:05
dans
Programmation
Il me semble que oui, mais il faut se demander comment l'arduino va créer sa carte de noeuds. Certainement un tableau.
#65717 Robot labyrinthe
Posté par
sur 02 novembre 2015 - 07:31
dans
Programmation
Je n'ai toujours pas mis en pratique.
J'avais fait cette recherche pour un robot aspirateur qui est resté à l'idée de projet.
J'avais dans l'idée d'utiliser l'algorithme star au sein d'une pièce et ce lui de Dijkstra pour le déplacement entre les pièces.
Je n'avais pas de délais dans la déplacement, sauf le niveau de la batterie pour retourner à la base de recharge
Maintenant est-ce une course en labyrinthe ou simplement un projet personnel ?
Si c'est une course, il faudra deux parcours, le premier pour construire la carte et le deuxième le parcours le plus rapide.
Personnellement je prendrais l’algorithme Dijkstra qui semble être plus rapide dans le calcul.
Dans google rechercher "Dijkstra vs star" et les avis sont partagé
#65721 Robot labyrinthe
Posté par
sur 02 novembre 2015 - 08:12
dans
Programmation
Il existe certainement plusieurs types de concours
-est-ce que la carte est connue ?
-est-ce qu'il y a un temps ou un objectif à atteindre?
-est-ce que la carte est connue ?
-est-ce qu'il y a un temps ou un objectif à atteindre?
#65697 Robot labyrinthe
Posté par
sur 01 novembre 2015 - 08:14
dans
Programmation
Bonsoir
Personnellement j'ai trouvé deux solutions
Cordialement
#53896 Robot intelligent
Posté par
sur 03 mars 2013 - 12:03
dans
Archives
Bonjour,
C'est une réponse sans essai personnel.
je passerai par là
http://blog.idleman.fr/?p=1788
associé à
http://blog.idleman.fr/?p=1623
Puis associé à une Arduino pour la commande du robot.
Maintenant je suis perplexe sur la commande vocale.
Bon dimanche
C'est une réponse sans essai personnel.
je passerai par là
http://blog.idleman.fr/?p=1788
associé à
http://blog.idleman.fr/?p=1623
Puis associé à une Arduino pour la commande du robot.
Maintenant je suis perplexe sur la commande vocale.
Bon dimanche
#77455 Robot autonome se rechargeant tout seul
Posté par
sur 27 décembre 2016 - 11:10
dans
Energie
si tu veux faire une maquette tu explose une brosse à dent électrique et tu regarde comment elle marche (plus) puis tu récupère les pièces.
#115809 robot aspirateur
Posté par
sur 30 avril 2022 - 11:12
dans
Domotique
Bonjour
Si tu cherches un petit volume peux utiliser des boites en plastique de chez Harib... J'avais utilisé cette solution pour mon projet.
Sinon tu as aussi les soucoupe en plastique de dessous les pots de fleur.
Mais il sinon c'est le détournement de produit qui fait le mieux
#91386 RobArchi 1.xx
Posté par
sur 09 janvier 2018 - 07:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
La version 1.xx de RobArchi est en ligne.
Elle vient compléter la version X.xx
Cette nouvelle étape permet de surveiller le niveau de charge de la batterie via un atmega328 (Arduino) reliè en I2C avec une carte Raspberry.
Je commence la version 2.xx pour un PanTilt avec Ultrason.
A bientôt





{kind=link}