Petite question : Peux tu poster une photo de ton câblage ?
Peux tu mesurer la tension sur la batterie au niveau de la prise d'équilibrage ?
J'ai l'impression que le problème peut être lié au câblage entre la batterie et le convertisseur ...

 1 note(s)
1 note(s)
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Débuté par gerardosamara, mars 27 2016 07:08
Arduino Raspberry PI3 MIT Inventor 2 Rover UGV Robot mobile PID
282 réponses à ce sujet
#221

Mike118
-

- Administrateur
-

- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 septembre 2018 - 02:33
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#222
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 23 septembre 2018 - 01:13
Mike,
Les mesures de tension suivantes ont été faites, avec la Lipo 2S que je viens de recevoir d'une boutique en ligne ici :
- Prise d'équilibrage batterie : 8V47 et 4;20V par cellule
- Batterie+inter+fusible ( donc à vide) : 7.03V
- Batterie+inter+fusible+convertisseur 5V avec bouton OFF : 6,80V
- Batterie+inter+fusible+convertisseur 5V sans charge , avec bouton ON :2,90V sur les points d'alimentation Ovin+GND , OvOut+GND, 5V+GND !!!!!!!!!!!
=> La tension batterie chute donc à 2,90V
=> Pas la peine d'aller plus loin et de raccorder les alimentations RPI ... sur le convertisseur 5V
Ensuite faut que je refasse un test avec un 12V pour alimenter le convertisseur 5V
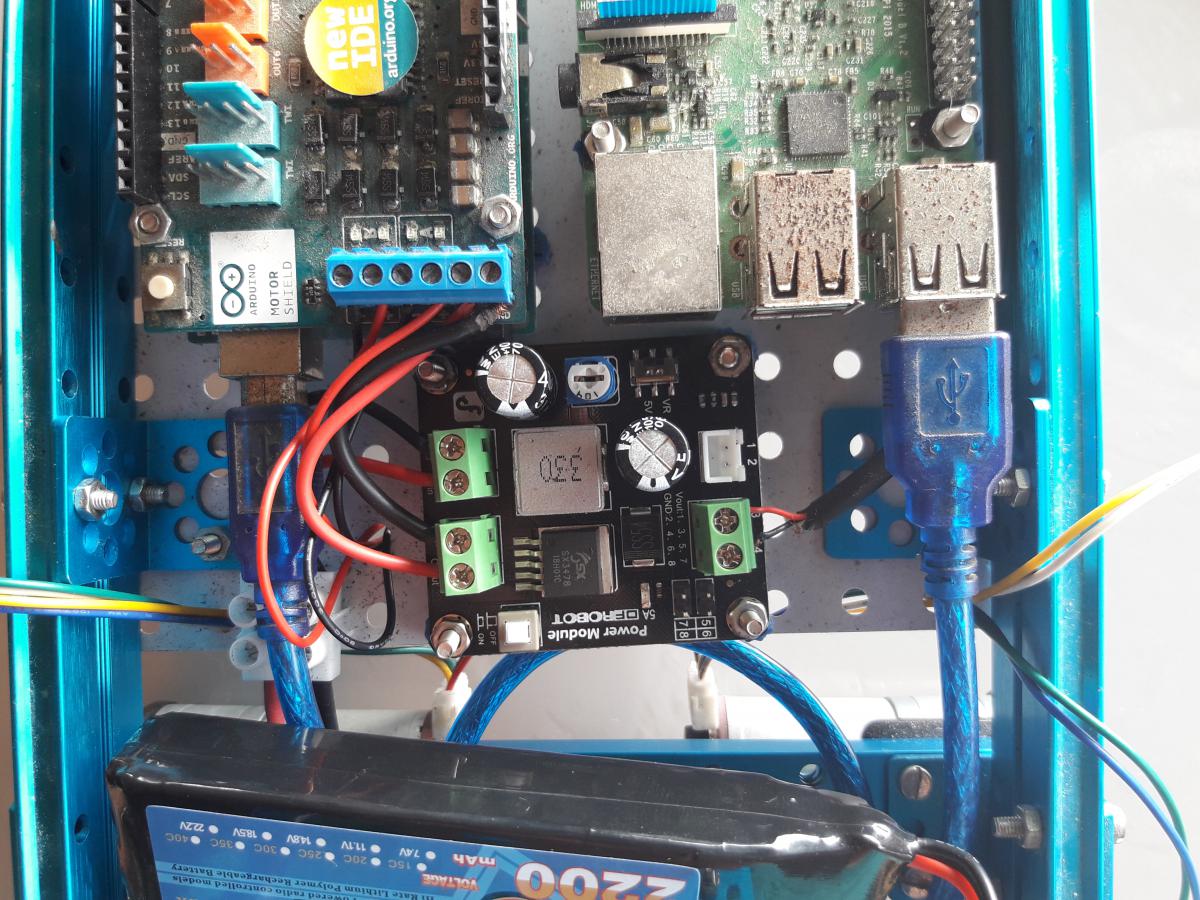
Photo de raccordement du convertisseur 5V avec les sorties 12V vers shield moteurs Arduino (ov out) et 5V vers RPI3
- Oliver17 aime ceci
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#223
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 23 septembre 2018 - 12:43
Donc si je comprends bien tu as le même problème avec une batterie 2S ?
Si c'est bien ça, ça me fait supposer que tu as quelque chose sur la ligne qui se comporte comme une résistance : pas de courant pas de problème / courant => Chute de tension ...
Mais ça n'explique pas pourquoi ça marcherait avec un convertisseur 12V à la place de la batterie ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

 regarde le datasheet peut être
regarde le datasheet peut être
#225
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 27 septembre 2018 - 02:28
@mike118 & Melmet,
Malheurement suite dernier essai , je n'ai pas trouvé la cause de la chute de tension lorsque la batterie est chargée avec la carte d'alimentation .
Le problème est le meme avec 2 batteries différentes ( Lipo 2S et Lipos 3S ) et 2 cartes convertisseurs 5V différentes (DFR0205).
L'interrupteur a été changé aussi.
Idem avec la datasheet du convertisseur 5V www.dfrobot.com/image/data/DFR0205/GS2678%20datasheet.pdf
, le robot ne consommant pas 5A.
Donc à part essayer avec un autre type de convertisseur ....
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#226
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 septembre 2018 - 10:34
Bon attends, reprenons.
1 ) le convertisseur DFR0205 de branché sur un convertisseur secteur avec juste la raspberry pi de branché dessus et ça marche ?
2) la même configuration mais avec la batterie ça ne marche pas ?
Le but c'est d'enlever le le branchement du superflus ( pas de drivers de moteurs ou autre pour le moment ... )
Je suis sur qu'en étant méthodique on va trouver un truc / une explication...
( bon après si tu en as marre on peut t'envoyer en express un convertisseur DC DC 5V 7A ... et tu auras plus de soucis.... Mais bon je suis sûr qu'on peut trouver quelque chose avec ce que tu as déjà )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#227
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 28 septembre 2018 - 02:06
Tu as bien résumé , le convertisseur 5V alimenté en direct ( sans fusible et inter ) par un chargeur 12V 2,2A fonctionne en étant chargé par le RPI3 ( shield moteurs et moteurs débranchés)
Toujours OK si ce chargeur est réglé sur 9V .
Cette configuration avec la batterie ne fonctionne pas.
J'en profite pour connecter la batterie Lipo 2S avec les memes fils d'alimentation en direct , sur le convertisseur ... et la ca marche toujours avec le RPI3 !!!!!!
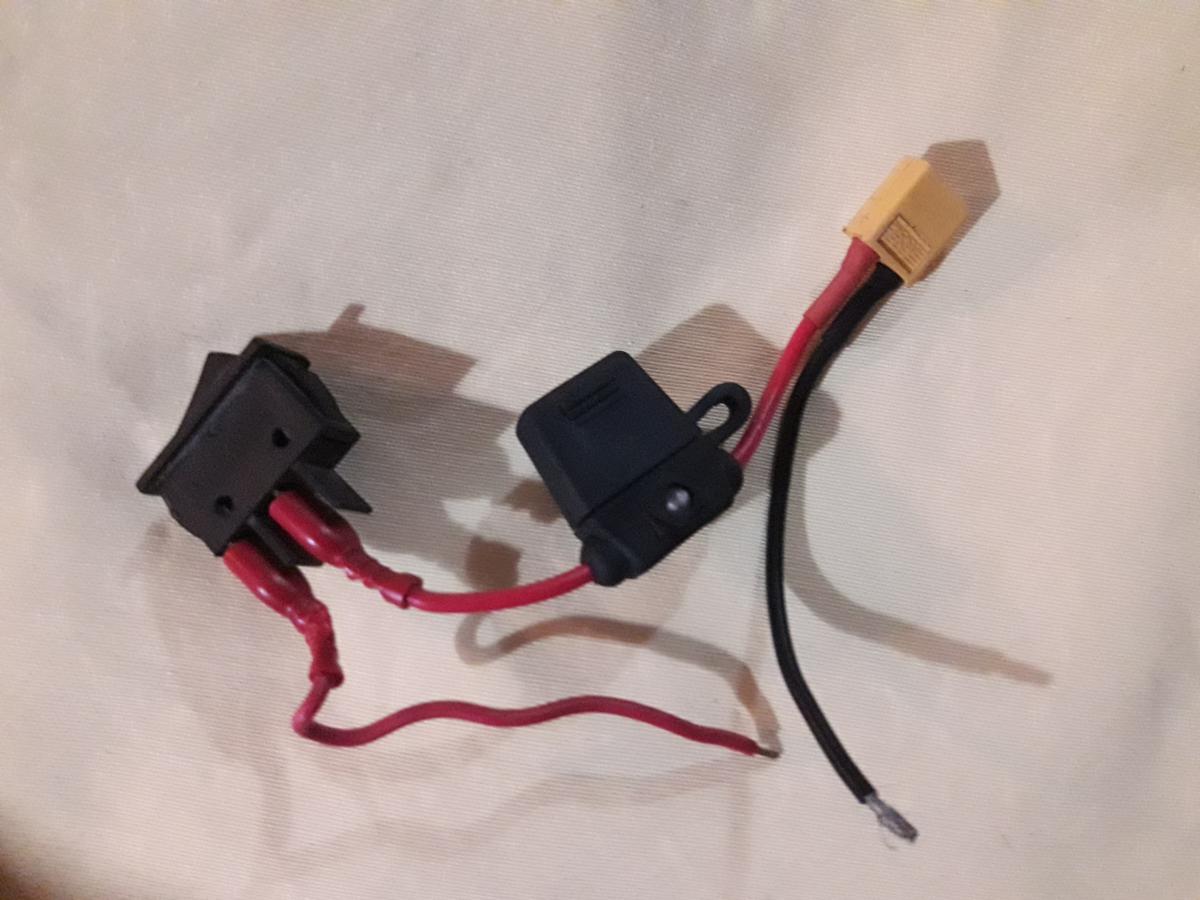
Ce qui a été enlevé du circuit d'alimentation de la configuration initiale posant problème est sur la photo .... je suis ravi et content comme disait je ne sais plus quel chanteur.
=> Le fusible de 2A était HS
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#228
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 septembre 2018 - 03:24
Ha mais on ne le voyait pas lui sur la photo !
Donc si je comprends bien tu as le même problème avec une batterie 2S ?
Si c'est bien ça, ça me fait supposer que tu as quelque chose sur la ligne qui se comporte comme une résistance : pas de courant pas de problème / courant => Chute de tension ...
Mais ça n'explique pas pourquoi ça marcherait avec un convertisseur 12V à la place de la batterie ...
Donc oui tu as bien quelque chose qui se comporte comme une résistance => Le fusible x)
Et ça explique pourquoi ça marche avec le convertisseur 12V => Tu retirais aussi le fusible de la ligne en retirant la batterie !
Tu peux mettre un fusible plus élevé dedans. C'est le même standard que sur les voitures. Donc il y en a partout et à pas cher =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#229
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 29 septembre 2018 - 04:06
Un fusible ouvert = résistance infinie certes mais bon c'est un coupe circuit et la tension batterie n'aurait pas du se trouver sur le convertisseur.
J'ai trouvé un fusible de 5A et après avoir reconnecter toutes les alimentations en sortie du convertisseur 5V ( RPI , Driver Moteur ) , le robot est bien alimenté par la batterie Lipo 2S 2200mA. 
Merci Mike pour le gros coup de main.
Reste à reconnecter les fils de commande entre Arduino et les driver moteur+détecteur ultrason pour lui faire faire ses premiers tours de roues à ce robot version 2
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#230
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 septembre 2018 - 04:32
Un fusible ouvert = résistance infinie certes mais bon c'est un coupe circuit et la tension batterie n'aurait pas du se trouver sur le convertisseur.
J'ai trouvé un fusible de 5A et après avoir reconnecter toutes les alimentations en sortie du convertisseur 5V ( RPI , Driver Moteur ) , le robot est bien alimenté par la batterie Lipo 2S 2200mA.
Merci Mike pour le gros coup de main.
Reste à reconnecter les fils de commande entre Arduino et les driver moteur+détecteur ultrason pour lui faire faire ses premiers tours de roues à ce robot version 2
EDIT : La photo est dans le bon sens dans mon PC !

Je pense que la tension que tu voyais était due à la led qui est sur le porte fusible. =)
En tout cas content de voir que le problème est résolu ! =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#231
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 01 octobre 2018 - 04:09
Remise en route et test du robot à partir de l'app Android :
- Retour video OK
- Commande moteur NOK ( le robot ne bouge pas ) sur commande AV ....
Le driver moteur (shield Arduino) est alimenté actuellement par une batterie Lipo 2S soit 7V environ et la tension délivrée aux moteurs par ce driver n'est que de 4v alors que les moteurs sont prévus pour 12V .
C'est la raison pour laquelle le robot était équipée de Lipos 3S initialement.
=> Après nouvelle recherche ici , une autre boutique en ligne de modélisme vends des Lipo 3S 4000 mA
=> A suivre
- Oliver17 aime ceci
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#232
cocothebo
-

- Membres
-
- 341 messages
Habitué
- Gender:Male
Posté 02 octobre 2018 - 08:27
Salut,
Cool si ça remarche 
Par contre 7V en entrée et 4 en sortie, ça me semble pas terrible, tu es sur que ton driver est bien paramétré (dans l'absolu tu devrais être pas loin des 7V en sortie à 100%).
Pour les batteries il me semble (j'ai pas vérifier récemment) que le moins cher reste hobbyking, en choissisant le depot EU ou UK pour ne pas avoir de douane; après la boutique robot maker à une lipo 3S de mémoire.
#233
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 03 octobre 2018 - 04:17
@cocothebo ,
Effectivement "good catch" , le paramétrage PWM du driver moteur était valorisé pour les anciens moteurs 6V .
Après avoir augmenté la valeur PWM , les 2 moteurs ont démarrés .
La tension délivrée aux moteurs est proche de 100 % de la tension batterie si PWM = 255 ( le max)
Le pilotage du robot fonctionne bien , reste à faire une petite vidéo d'avancement
Pour l'achat de batterie , quand je disais "ici" , c'est au Costa Rica . Pour l'instant je vais me contenter de cette Lipo 2S meme si les moteurs ne pourront pas tourner à leur vitesse max comme avec une Lipo 3S.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#234
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 06 octobre 2018 - 05:12
Voici la vidéo de pilotage du robot mobile Rover1 V2 ( changement plateforme matérielle ) ... perturbé par un chien en garde pour le week end ( il n'avait jamais vu de robot de sa vie )
La course du robot est aussi perturbée par le plancher de la terrasse en bois qui n'est pas bien plat et qui bloque la roue folle par moment .... ah oui l'odométrie monsieur !
Pour le bruit de fond , c'est le bruit des vagues du pacifique
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#235
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 08 octobre 2018 - 07:31
Point de situation de "rover1" :
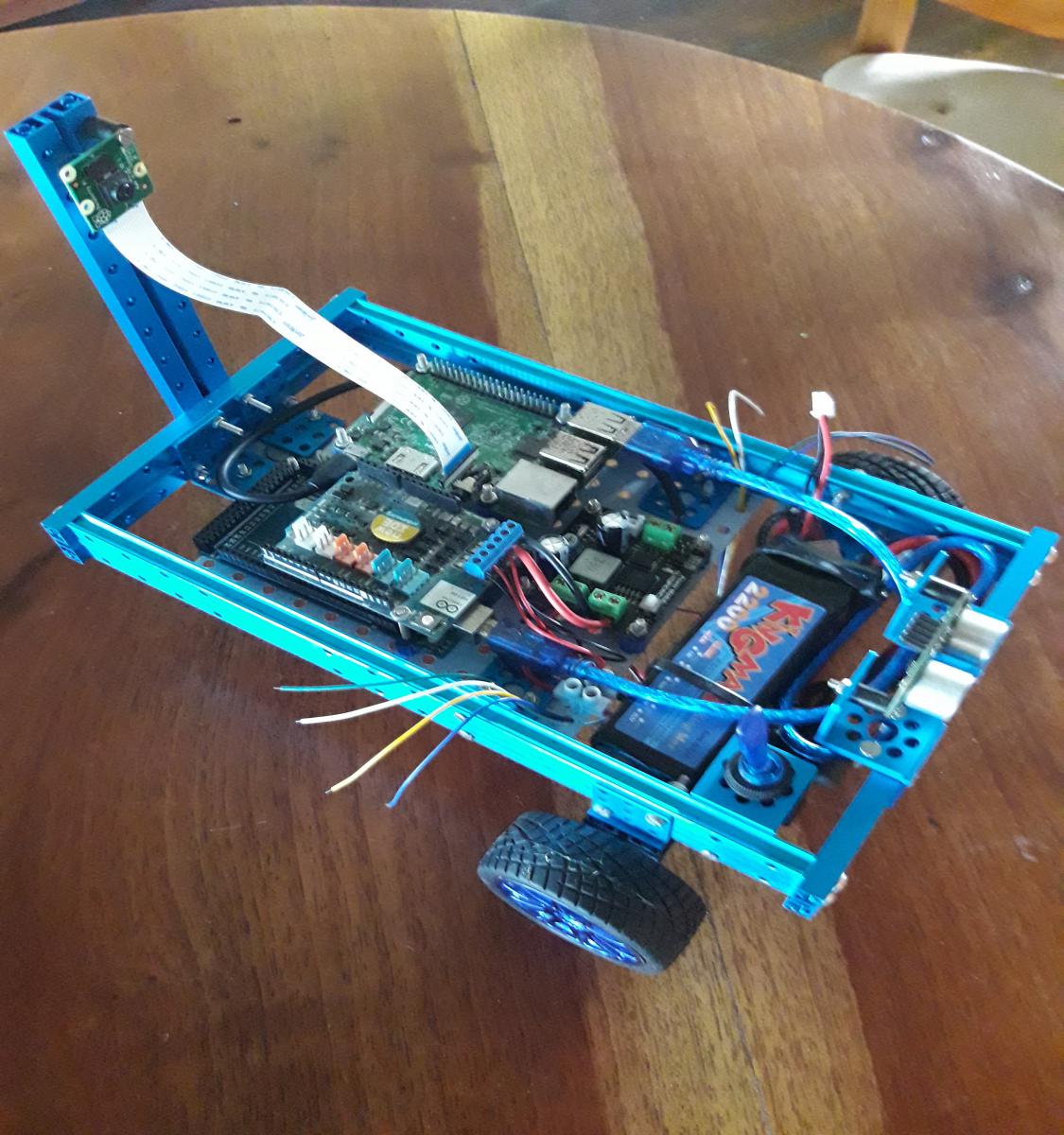
La version 2 du robot mobile est opérationnelle et comprend :
- Un nouveau chassis Makeblock à 2 roues motrices + 1 roue folle arrière , toujours piloté par la meme app Android MIT Inventor2 avec retour video pour piloter le robot par Wifi
- Une batterie Lipo 3S 11.7V et 2200 mAh
- Un convertisseur 5A 12V-5V équipé d'1 sortie 12V pour le driver moteurs et de 4 sorties 5V pour RPI3 et capteurs
- Un raspberry PI3 + Arduino Mega + shield moteur Arduino
- Deux motoréducteurs GM25-370CA avec encodeur en 3.3V + roues
- Une Caméra Pi V2 pour retour vidéo et détection de mouvement avec "motion"
- Un capteur ultrason SRF05 pour détection distance & obstacles à l'avant du robot
La prochaine évolution en cours :
- Un 2ème capteur ultrason HC-SR04 pour détection obstacles à l'arrière du robot
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#236
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 12 octobre 2018 - 12:33
Le capteur HC-SR04 a été installé à l'arrière du robot et son comportement s'est révélé parfois assez erratique ( détection obstacle à tort lié à des mesures érronées et donc arret du robot par design ) , aussi j'ai refais les tests unitaires avec le code proposés dans la boutique pour ce capteur .
#define TRIGG 9 // Broche TRIGGER
#define ECHO 10 // Broche ECHO
// definition du Timeout
const long TIMEOUT = 25000UL; // 25ms = ~8m à 340m/s
float son= 340.0 / 1000; //vitesse du son dans l'air (mm/µs)
void setup() {
pinMode(TRIGG, OUTPUT); //Configuration des broches
digitalWrite(TRIGG, LOW); // La broche TRIGGER doit être à LOW au repos
pinMode(ECHO, INPUT);
Serial.begin(9600); //Démarrage de la liaison série
}
void loop() {
digitalWrite(TRIGG, HIGH); // Lance une mesure de distance en envoyant
delayMicroseconds(10); //une impulsion HIGH de 10µs sur la broche TRIGGER
digitalWrite(TRIGG, LOW);
int mesure = pulseIn(ECHO, HIGH, TIMEOUT); // Mesure le temps entre
// l'envoi de l'ultrason et sa réception
float distance_mm = mesure / 2.0 * son; //calcul de la distance grâce au temps
//on divise par 2 car le son fait un aller-retour
Serial.print("Distance: "); //Affichage des résultats
Serial.print(distance_mm);
Serial.println("mm");
delay(500); //temps entre chaque mesure (ms)
}
Problème confirmé par les résultats des tests avec ce code , de nombreuses valeurs sont très faibles voires nulle en fonction de l'orientation du robot
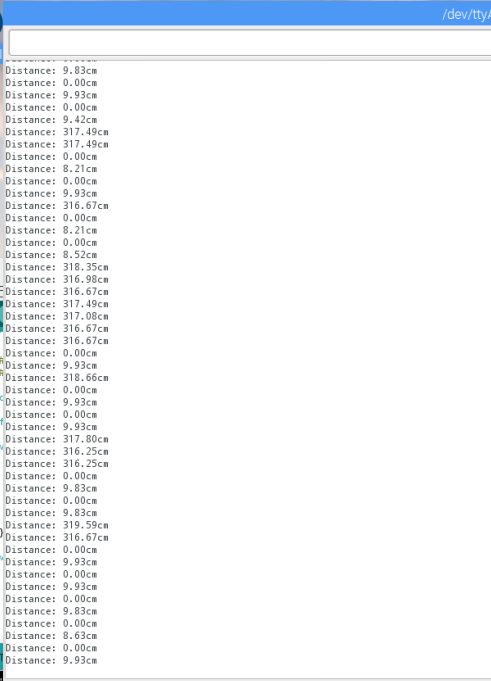
=> Normalement une valeur "0" correspondant à une mesure sans obstacle mais ce n'est pas le cas ici ?
=> La valeur "0" sera de toute facon à ignorer dans la vraie vie
=> Ce capteur semble très sensible à l'environnement ( lumière ... ) , ce n'est pas le cas avec le capteur SRF05 à l'avant du robot ?
=> Capteur à conserver dans ces conditions , je me pose la question ?
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#237
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 octobre 2018 - 03:48
En effet, il faut ignorer le 0.
0 correspond à "aucun retour " donc soit il n'y a pas d'obstacle à 3m du robot soit l'obstacle est tellement incliné que les ultrasons ne rebondissent pas vers le récepteur. ( Genre orientation à 75° par rapport au mur ... )
Par contre pour le code à utiliser, je te suggère d'utiliser la librairie newping.
Le code de test proposé sur la boutique c'est juste un test de prise en main pour vérifier que le capteur sort bien des mesures, sans avoir à installer de librairie ...
J'ai beaucoup utilisés ces capteurs sans soucis :


même sur des gros robots

Malgré des usages en conditions extérieurs, et sous très fortes lumière non naturelle ( coupe de france de robotique ) je n'avais jamais rencontré de sensibilité à la lumière ...
Je suis très curieux d'en savoir plus sur tes obsevations...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#238
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 octobre 2018 - 06:06
Avec l'expérience de ma participation à la Toulouse Robot Race, j'en ai tiré la conclusion que les capteurs de lumière sont très sensibles à la lumière naturelle et que les capteurs à Ultra-son sont sensibles au vent, même léger.
Pour le vent, je devais faire un test avec sèche cheveux.
Pour le vent, je devais faire un test avec sèche cheveux.
- Mike118 aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#239
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 octobre 2018 - 12:54
intéressant cette histoire du vent jusqu'à présent je n'avais pas rencontré le problème mais physiquement je comprends le principe : " Le vent influence seulement la vitesse des ondes sonores en y ajoutant ou soustrayant sa propre vitesse de 340 m/s ! Le son nous parviendra toujours, à une poignée de secondes d'intervalle, mais le volume restera quant à lui toujours identique. "
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#240
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 octobre 2018 - 03:06
Je ne suis pas certain de comprendre.intéressant cette histoire du vent jusqu'à présent je n'avais pas rencontré le problème mais physiquement je comprends le principe : " Le vent influence seulement la vitesse des ondes sonores en y ajoutant ou soustrayant sa propre vitesse de 340 m/s ! Le son nous parviendra toujours, à une poignée de secondes d'intervalle, mais le volume restera quant à lui toujours identique. "
A mon avis, une pression ou une dépression modifie la vitesse du son.
Lorsque je me suis rendu à la Toulouse Robot Race, j'ai utilisé un programme qui faisait une simple temporisation.
Tout le monde, je dis bien tout le monde, a eu des problèmes avec les IR et les US.
A la maison, je me suis rendu compte que mon capteur à ultra-sons fonctionnait parfaitement bien en intérieur et de manière catastrophique en extérieur.
Pourtant, dans mon programme, je faisais une prise de distance avec une itération de 5 fois dans une boucle, avec un petit délai à chaque fois.
Si à chaque fois je détectais quelque chose alors je prenais la mesure en compte.
Cela fonctionnait bien à l'intérieur, en passant très rapidement ma main la détection n'était pas prise en compte.
Par contre, si je passais ma main un peu plus lentement, alors la détection était prise en compte.
Mais à l'extérieur, rien à faire.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Arduino, Raspberry PI3, MIT Inventor 2, Rover, UGV, Robot mobile, PID
![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)



0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




