Je compte essayer de proposer une solution, qui permettra de "rallonger" =) ou proposer de longue nappes ... Mais je trouve que les nappes comme ça ne sont pas assez " souple " ... Mais il y en a qui peuvent préférer la nappe ... Donc à voir .

 5 note(s)
5 note(s)
Mes robots web sécurisés avec accès publique !
Débuté par Serveurperso, avril 08 2017 02:43
Robot Node.js Serveur Web UHF Faible latence Radioamateur PIC32 HTML5 H.264
245 réponses à ce sujet
#201

Mike118
-

- Administrateur
-

- 10â¯296 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 décembre 2017 - 11:39
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#202
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 29 décembre 2017 - 11:55
J'ai une question pour toi Pascal.
Dans tes robots à 4 roues motrices, tu as des encodeurs pour chacune des 4 roues (j'imagine).
Tu utilise quoi pour lire les impulsions de ces 4 capteurs ?
De mon coté, je remarque que mon arduino nano a du mal à choper toutes les impulsions de mes 2 roues codeuses quand je vais à fond. Et je ne compte qu'un seul canal sur les 2. Genre une fois sur 10, j'ai un loupé.
C'est des moteurs CC à 100 RPM et 6533 ticks par tour, pour avoir un ordre d'idée.
#203
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 décembre 2017 - 12:00
Hop une petite vidéo de test
Des nappes de picam c'est standard ça coute rien et t'as toutes les longueurs...
50cm : https://www.ebay.fr/...isAAOSw241YcCrc
2m : https://www.ebay.fr/...GsAAOSwXXxZQGbD
Comment path ?
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

#205
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 décembre 2017 - 12:29
J'ai une question pour toi Pascal.
Dans tes robots à 4 roues motrices, tu as des encodeurs pour chacune des 4 roues (j'imagine).
Tu utilise quoi pour lire les impulsions de ces 4 capteurs ?
De mon coté, je remarque que mon arduino nano a du mal à choper toutes les impulsions de mes 2 roues codeuses quand je vais à fond. Et je ne compte qu'un seul canal sur les 2. Genre une fois sur 10, j'ai un loupé.
C'est des moteurs CC à 100 RPM et 6533 ticks par tour, pour avoir un ordre d'idée.
4 moteurs = 4 encodeurs car 4 asservissements (c'est obligatoire / c'est neuneu)
Configuration logicielle :
Boucles PID à 25ms (40Hz) car si on accélère plus il sera impossible de touner au plus lent des moteurs avec ce type d'encodeurs magnétique (faudrait de l'optique)
Interrupt timer à 20KHz pour les encodeurs avec une routine de lecture hyper optimisée, pas de pin CHANGE interrupt sur le PIC32 (uniquement du RISING ou FALLING) et cette méthode fait intrinsèquement filtre passe bas et permet de tourner très vite vu le grossier des encodeurs magnétiques...
Configuration mécanique du petit robot :
#define CONTROLEURRATE 25 // PID en ms #define PPR 5L #define RPMMAX 12000 // Vitesse max du moteur avec une marge pour l'asservissement + batterie faible #define GEARBOX 100 #define CPR (PPR * 4) // 20 #define RPSMAX (RPMMAX / 60) // 200 #define CONTROLEURRATEHERTZ (1000 / CONTROLEURRATE) // 40 Hz #define VITESSEMAX (CPR * RPSMAX / CONTROLEURRATEHERTZ) // 100 #define ROUECPR (CPR * GEARBOX) // 2000
Configuration mécanique du gros robot :
#define CONTROLEURRATE 25 #define PPR 13L #define RPMMAX 8000 #define GEARBOX 51 #define CPR (PPR * 4) // 52 #define RPSMAX (RPMMAX / 60) // 133.33333333333333333333333333333 #define CONTROLEURRATEHERTZ (1000 / CONTROLEURRATE) // 40 #define VITESSEMAX (CPR * RPSMAX / CONTROLEURRATEHERTZ) // 138.66666666666666666666666666666 #define ROUECPR (CPR * GEARBOX) // 2652
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#206
Mike118
-
- Administrateur
-
- 10â¯296 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 29 décembre 2017 - 12:40
J'ai une question pour toi Pascal.
Dans tes robots à 4 roues motrices, tu as des encodeurs pour chacune des 4 roues (j'imagine).
Tu utilise quoi pour lire les impulsions de ces 4 capteurs ?
De mon coté, je remarque que mon arduino nano a du mal à choper toutes les impulsions de mes 2 roues codeuses quand je vais à fond. Et je ne compte qu'un seul canal sur les 2. Genre une fois sur 10, j'ai un loupé.
C'est des moteurs CC à 100 RPM et 6533 ticks par tour, pour avoir un ordre d'idée.
Il utilise le pic32 ( ubw32 ) .
Par contre tu dois pouvoir mesurer tes deux signaux 11 KHz avec une arduino nano sans avoir de louper sans problèmes. ça dépend de comment est fait ton programme mais le mieux est d'en discuter sur un autre thread 
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#207
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 décembre 2017 - 12:47
Mon code de lecture de 4 encodeurs (port E du PIC32) je le fait fonctionner sans pb sur Arduino, d'ailleur le gros robot était du Arduino mega sans autopilote et sans aucune différence de fonctionnement niveau fluidité.
#define ENCODEURSPORT PORTE
Timer4 timer4;
volatile int16_t encodeurAvgVolatile = 0;
volatile int16_t encodeurArgVolatile = 0;
volatile int16_t encodeurAvdVolatile = 0;
volatile int16_t encodeurArdVolatile = 0;
void setupControleur() {
timer4.setFrequency(20000);
timer4.attachInterrupt(encodeursIsr);
timer4.start();
}
void __attribute__((interrupt)) encodeursIsr() {
uint8_t avg;
uint8_t arg;
uint8_t avd;
uint8_t ard;
static uint8_t oldAvg = 0;
static uint8_t oldArg = 0;
static uint8_t oldAvd = 0;
static uint8_t oldArd = 0;
static const int8_t encodeurs[] = {
0, -1, 1, 0,
1, 0, 0, -1,
-1, 0, 0, 1,
0, 1, -1, 0
};
avg = ENCODEURSPORT & 3;
arg = ENCODEURSPORT >> 2 & 3;
avd = ENCODEURSPORT >> 4 & 3;
ard = ENCODEURSPORT >> 6 & 3;
encodeurAvgVolatile += encodeurs[(oldAvg << 2) + avg];
encodeurArgVolatile += encodeurs[(oldArg << 2) + arg];
encodeurAvdVolatile += encodeurs[(oldAvd << 2) + avd];
encodeurArdVolatile += encodeurs[(oldArd << 2) + ard];
oldAvg = avg;
oldArg = arg;
oldAvd = avd;
oldArd = ard;
clearIntFlag(_TIMER_4_IRQ);
}
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#209
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 décembre 2017 - 01:05
Normalement avec tout ça tu peux reproduire sans pb cette solution qui fonctionne
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#210
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 01 janvier 2018 - 10:14
Bonne année pleine de robotique !!!
Hop ce post marque la fin de la conf du petit robot. Il lui manque plus que la pince et la station de recharge.
On visualise bien les 4 roues de son grand frère:D et le tuyau à raz du sol qui conduit à la salle de bain, et des giclées de lidar sous les obstacles malgré les 2 ou 3cm petits cm d'espace

Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#211
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 05 février 2018 - 12:21
Hop le petit robot est aussi un point d'accès wifi sur une interface wlan séparée comportant un portail captif pour qu'il soit hyper simple de s'y connecter depuis des smartphones ou autres tout en étant connecté, ou pas au Wi-Fi de la maison. Démo :
- ashira aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#212
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 19 février 2018 - 01:35
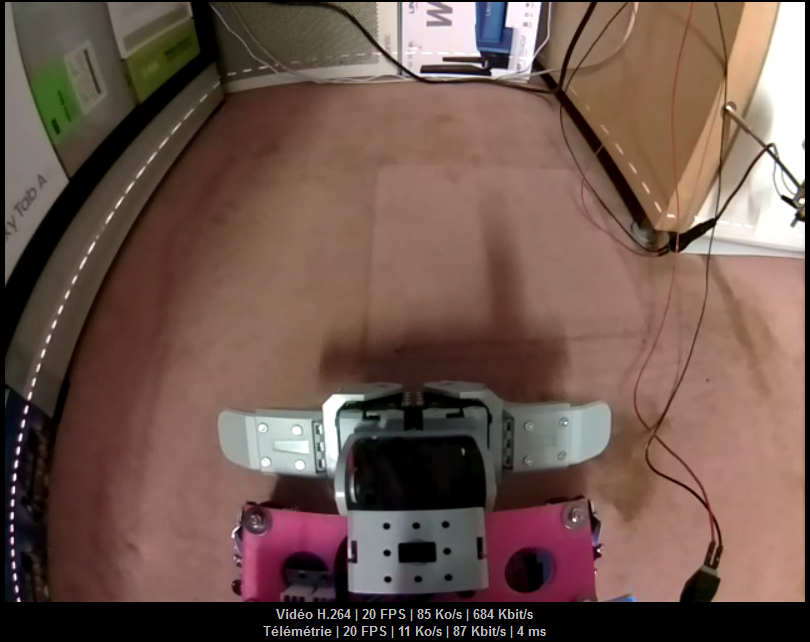
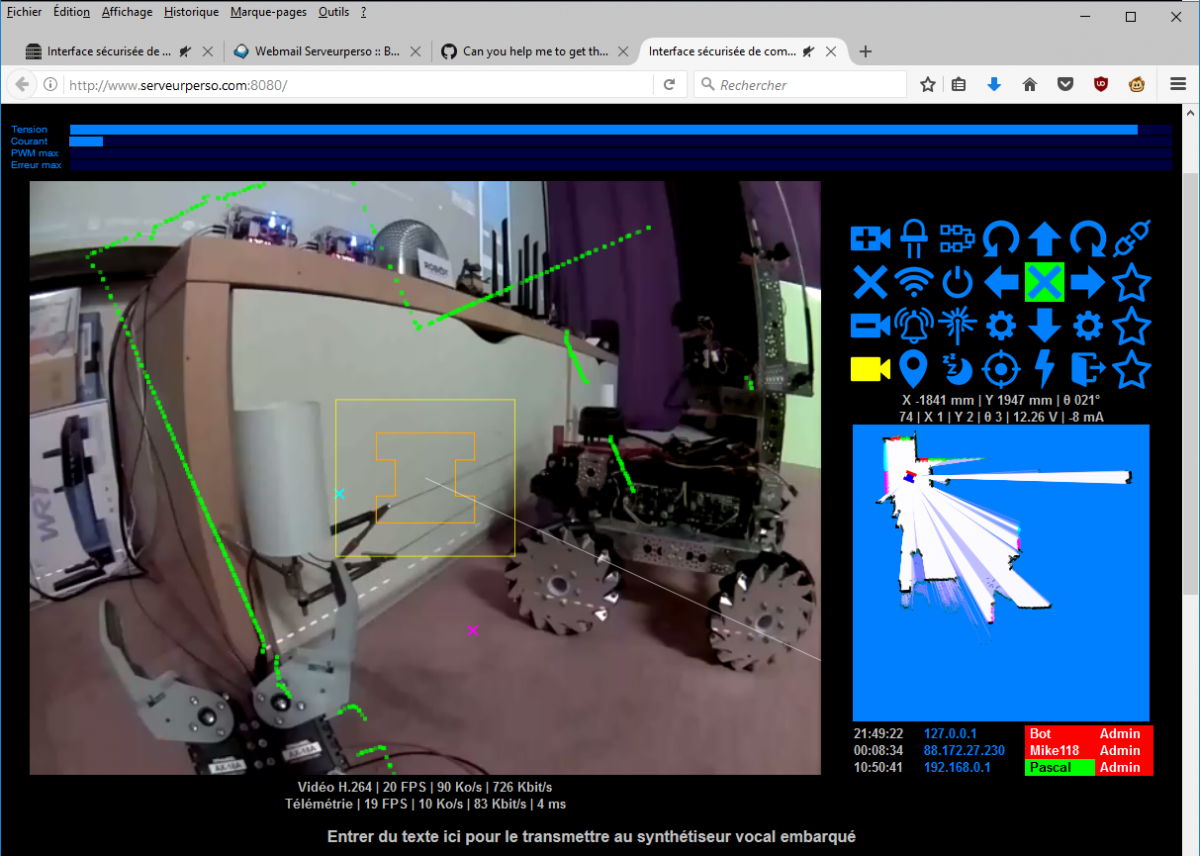
Et Re Hop, le petit robot version Wi-Fi comporte maintenant une liaison vidéo hyper optimisée grâce au codec H.264 :
http://www.serveurperso.com:8080/
Ce qui signifie qu'avec une petite ADSL ayant 1Mbps d'upload il est possible d'envoyer sur internet une vidéo fluide.
En comparaison le MJPEG demande 10 fois plus de débit pour une qualité similaire.
C'était la dernière brique logicielle manquante pour rivaliser avec n'importe quel autre produits vidéo du marché mais avec un décodage sans aucun plugin, juste le navigateur Firefox ou Chrome.
- R1D1 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

#214
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 19 février 2018 - 01:56
H.265 est techniquement mieux que le H.264, mais :
On fait du H.264 en profile Baseline pour alléger au maximum les ressources côté client et être compatible avec Broadway le seul composant logiciel capable de décompresser de la vidéo en temps réel en JavaScript, ce qui est une prouesse technique toute nouvelle grâce à Asm.js, les Web Workers éventuellement le canvas accéléré par WebGL.
La raspberry PI peux générer du H.264 avec un profile meilleur que le baseline mais il n'existe pas de client web open-source permettant de le décompresser en live et sans rien avoir a installer.
Alors de la a parler de H.265 nous y sommes pas encore... Ni en compression sur un raspberry PI et ni en décompression à la volée sur Smartphone (hormis code Natif)...
On fait du H.264 en profile Baseline pour alléger au maximum les ressources côté client et être compatible avec Broadway le seul composant logiciel capable de décompresser de la vidéo en temps réel en JavaScript, ce qui est une prouesse technique toute nouvelle grâce à Asm.js, les Web Workers éventuellement le canvas accéléré par WebGL.
La raspberry PI peux générer du H.264 avec un profile meilleur que le baseline mais il n'existe pas de client web open-source permettant de le décompresser en live et sans rien avoir a installer.
Alors de la a parler de H.265 nous y sommes pas encore... Ni en compression sur un raspberry PI et ni en décompression à la volée sur Smartphone (hormis code Natif)...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)


#216
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 19 février 2018 - 02:01
L'inconvénient c'est que si la connexion n'upload pas assez vite (cas ADSL vraiment moisi comme chez jojo) ou alors si le client à un débit affreux, le retard s'accumule et créé de la latence. or qu'avec mon MJPEG j'ai fait un protocole real-time qui prend garde a n'avoir aucune trame de latence.
- Oliver17 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#217
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 février 2018 - 11:19
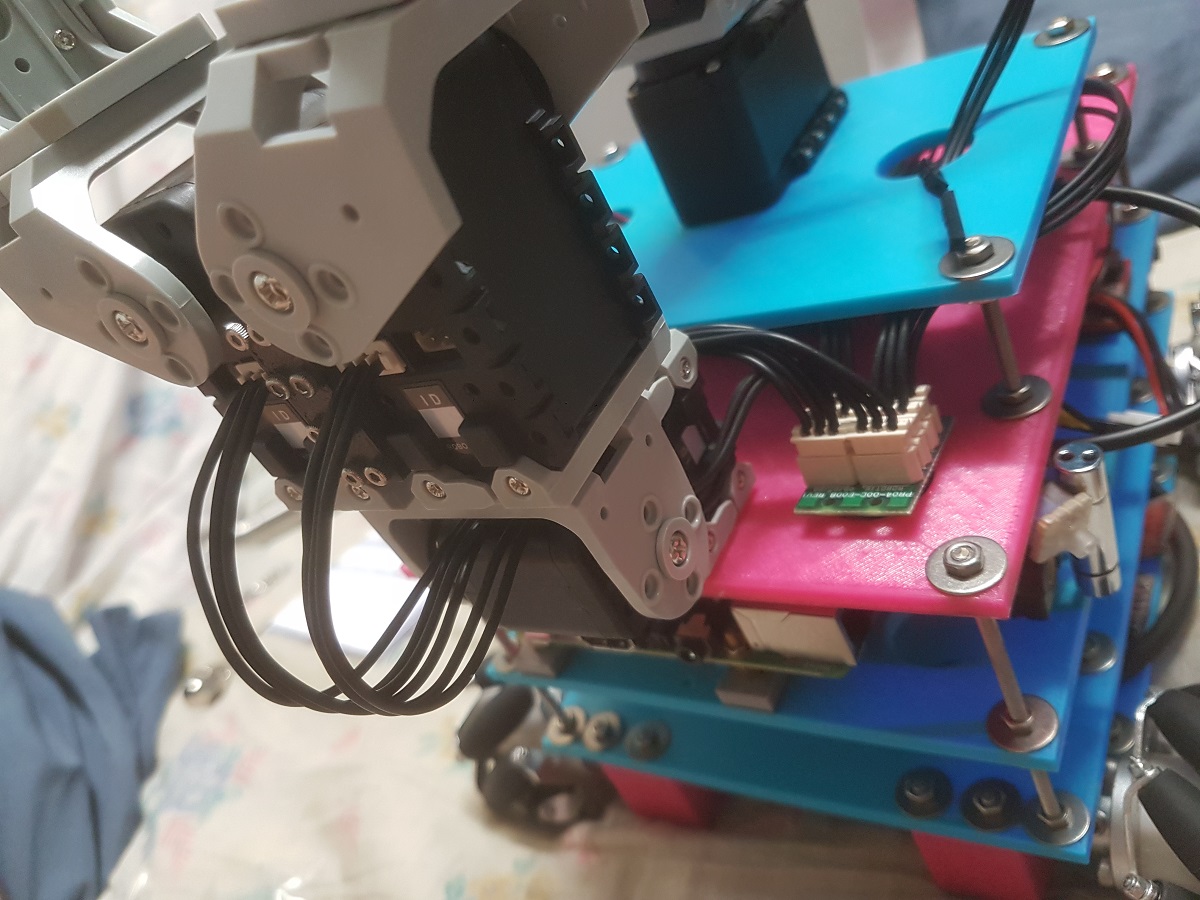
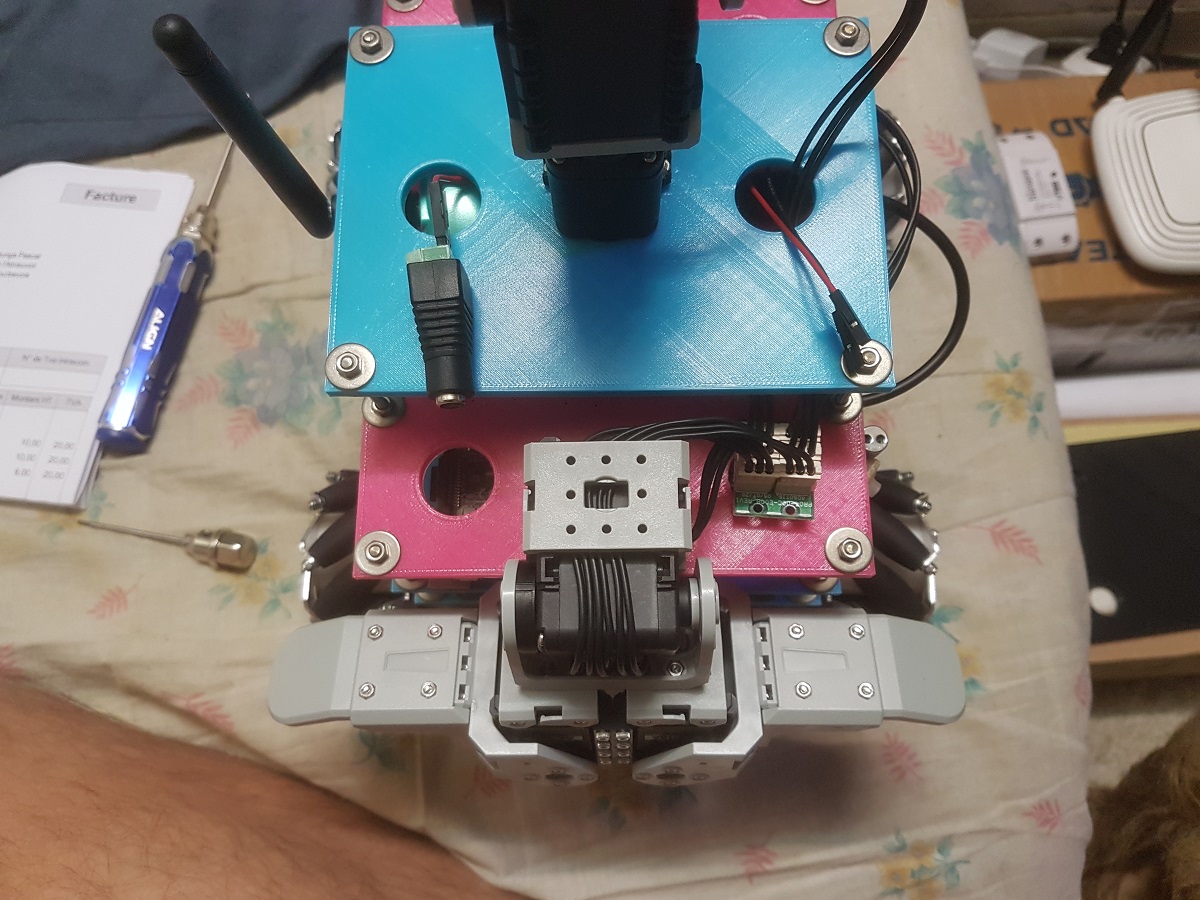
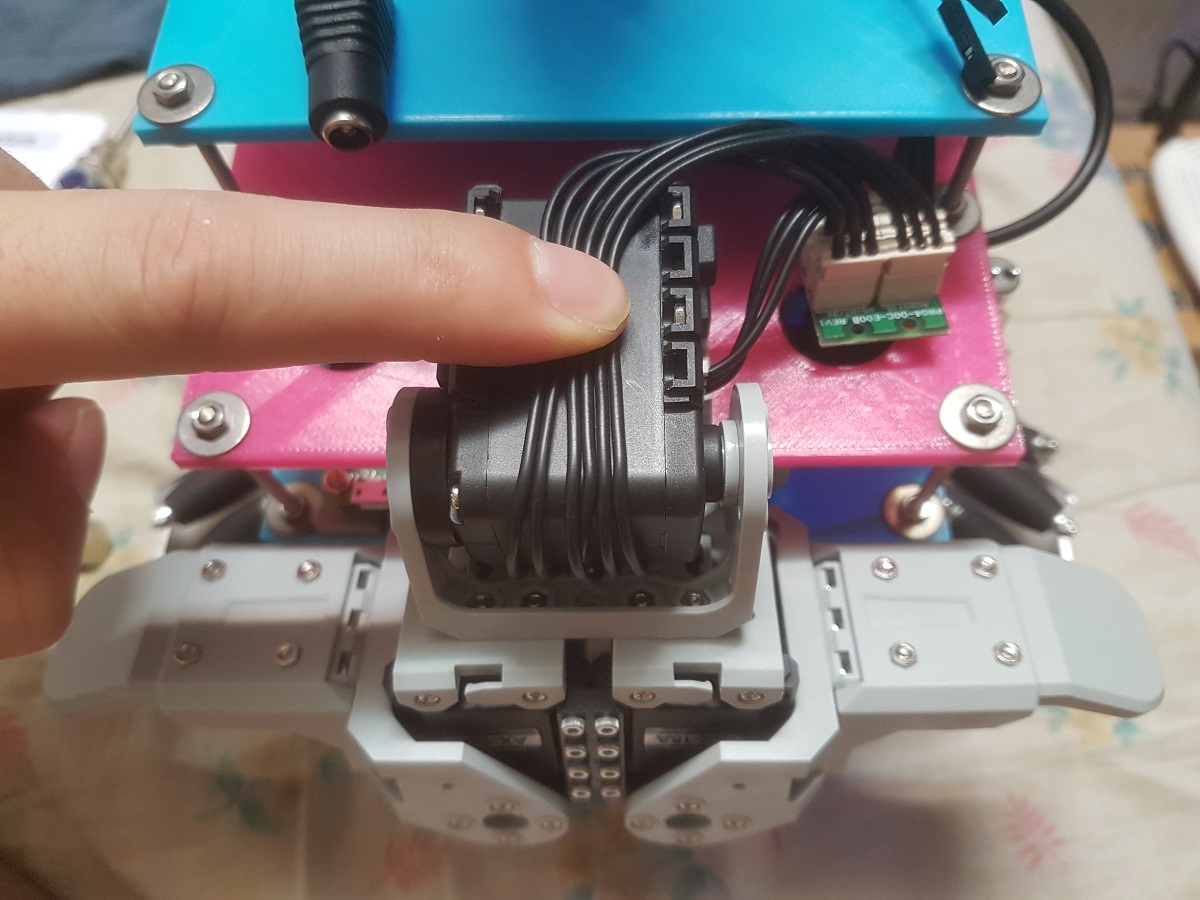
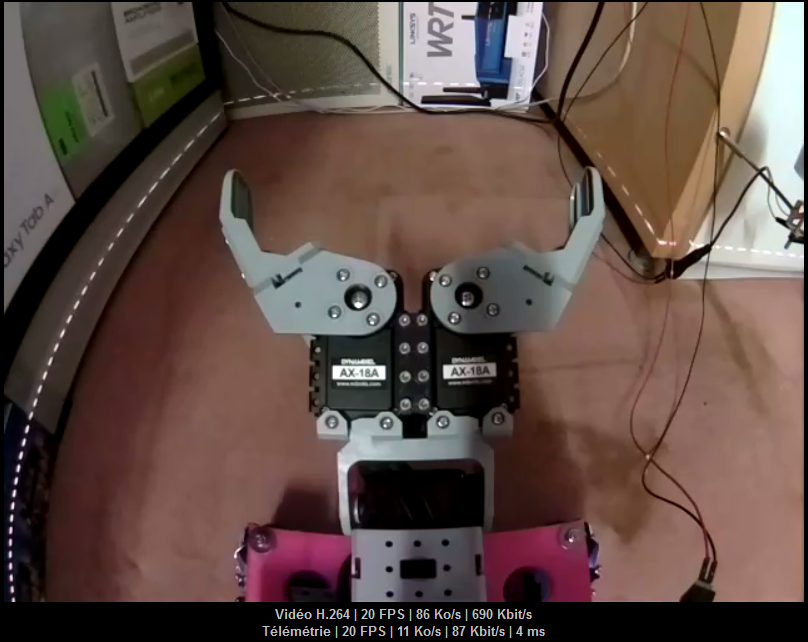
Le bébé robot à encore avancé, la pince en AX18 capable de soulever une canette de 33cl au maximum;
Et l'affichage des statistiques H.264 en live pour aider au tuning. Même avec des débits d'ordre de 300Kbit/s on arrive à obtenir une vidéo potable et piloter le robot sans latence chez Mike. Ce matin c'était même OK à 2 visiteurs sur sa cnx !
Voici quelques photos :
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#219
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 28 février 2018 - 08:49
Ah oui d'accord un RPLIDAR A1 au sol avec du google Gmapping + la kinect pour faire une grille d'occupation 3D
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#220
Mike118
-
- Administrateur
-
- 10â¯296 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 février 2018 - 08:57
Pour faire un équivalent en lowcost on a de quoi faire sur la boutique :
4 moteurs + roue
driver de 4 moteurs
Lidar A1
c'est en partie ce que j'utilise sur mon robot Robil =)
bon par contre on fourni pas encore la kinect =)
- Serveurperso aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Robot, Node.js, Serveur, Web, UHF, Faible latence, Radioamateur, PIC32, HTML5, H.264
![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




