Tu peux me donner les valeur en pixel que tu obtiens sur les deux caméra ?
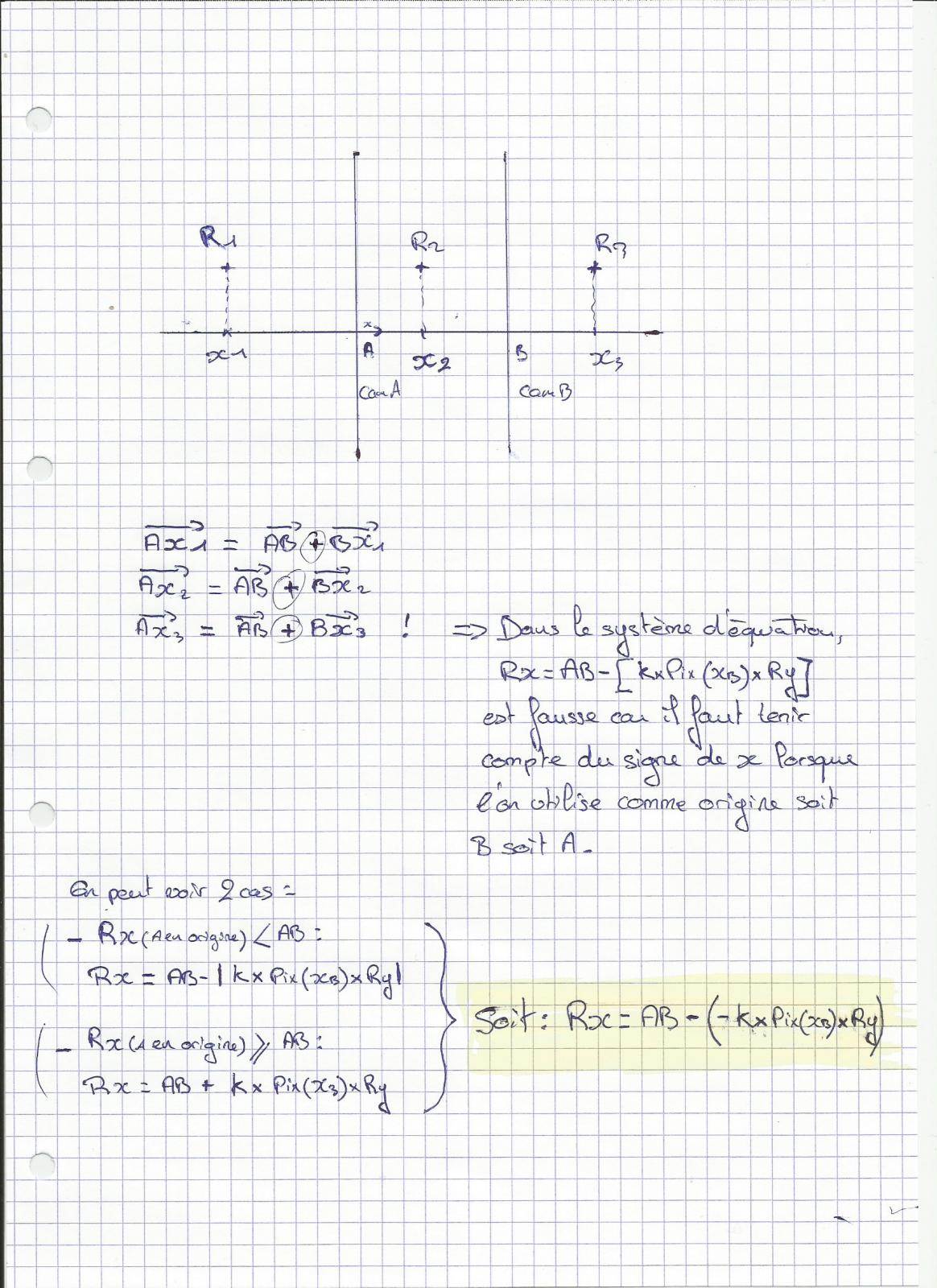
Genre tu fais 3 cas différent :
tu notes tes points RX RY RZ et les coordonnes en pixel Px1 Pz1 et Px2 Pz2 pour chacun des 3 cas,
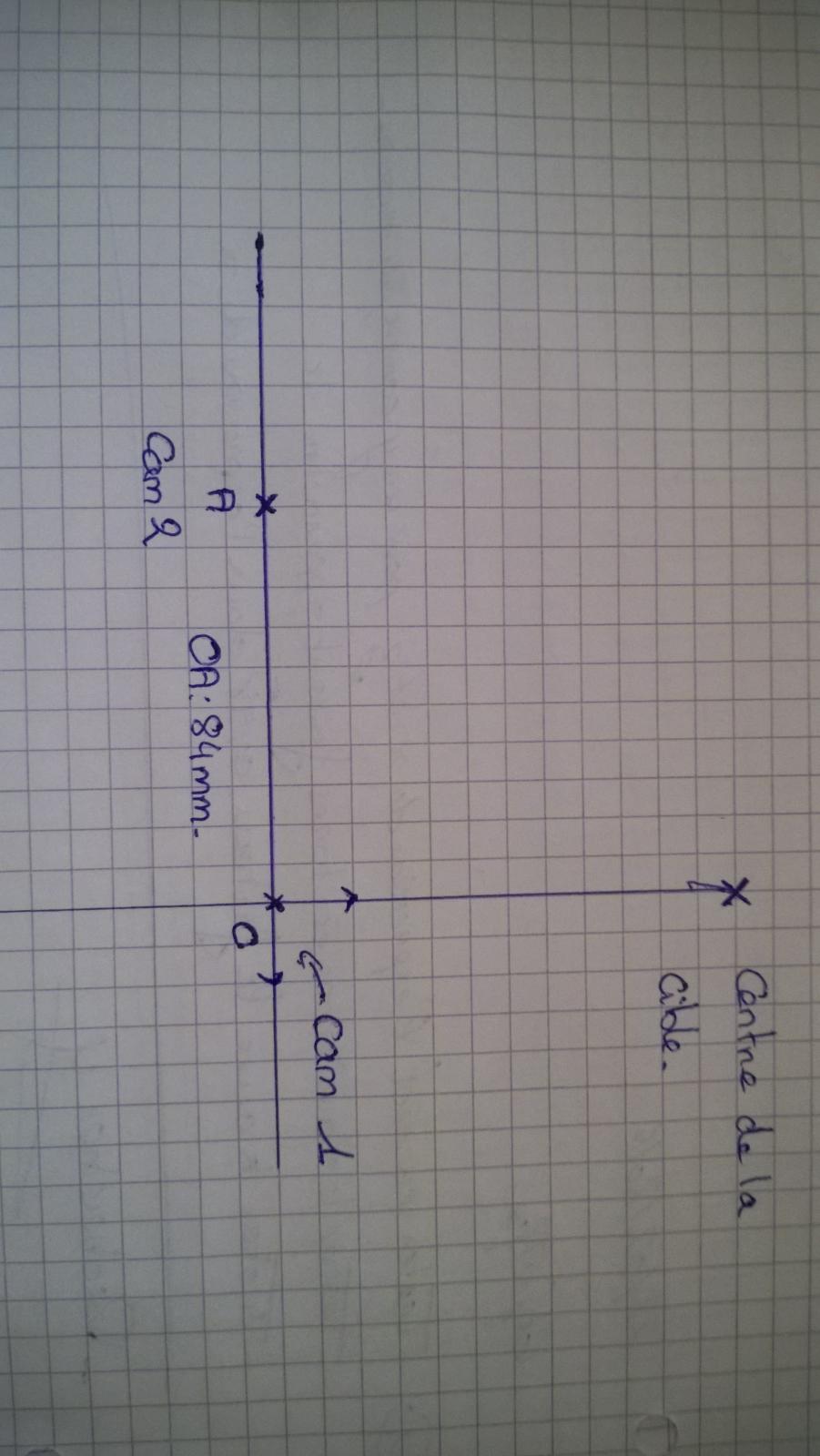
Donnes moi aussi la distance OA entre tes deux centre de caméra.
(On est d'accord que la caméra 1 se place sur l'origine O du repère et le centre de la caméra 2 est le point A situé sur l'axe X à la distance OA. Les distances donné en mm ( ou en pixel pour Px et Pz ) )


 )
)