

Je vous présente BOB5!
Voilà, comme promis, j'ai avancé sur la fabrication de mon nouveau robot. Et quel projet!
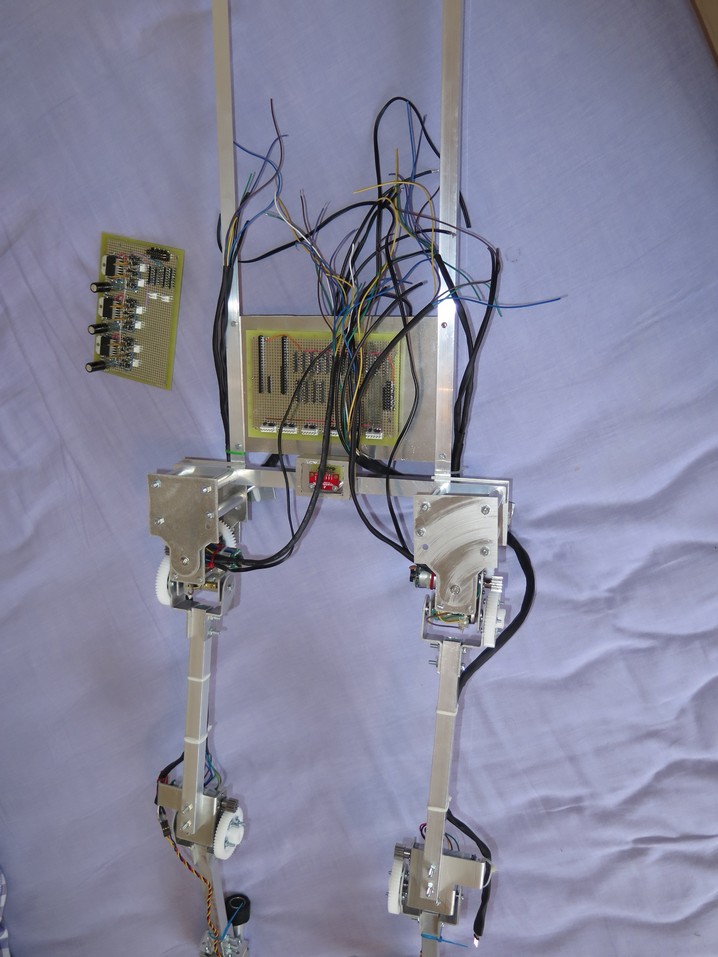
Un bipède de 1m20 de haut, 60cm de hauteur de hanche, rien que ça! Un peu plus de 3kg sur la balance.
Cette réalisation est dans la continuité de mes travaux précédents en simulation.
http://www.robot-maker.com/forum/topic/9109-projet-de-bipede-marche-dynamique/
L'idée est de confronter le principe que j'ai développé en simulation, et d'essayer de le faire fonctionner en vrai.
Donc je reprend les mêmes principes :
* 8 degrés de liberté seulement
* incapable de tourner sur soi même (lacet), aucune articulation d'axe vertical
* pieds cylindriques, ce qui fait l'économie d'un servo de cheville en roulis
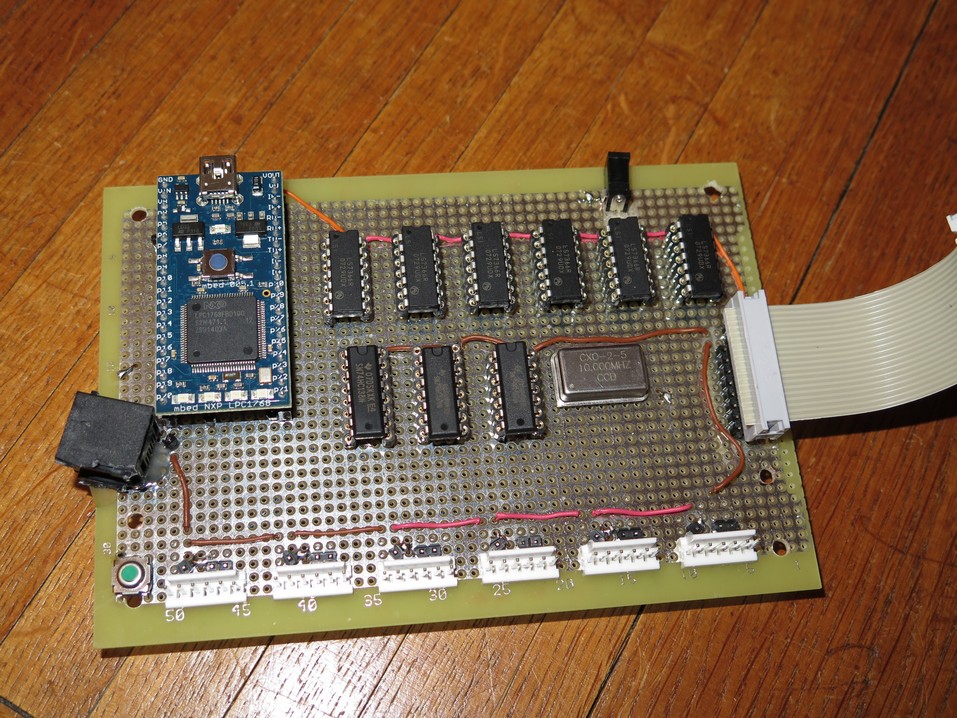
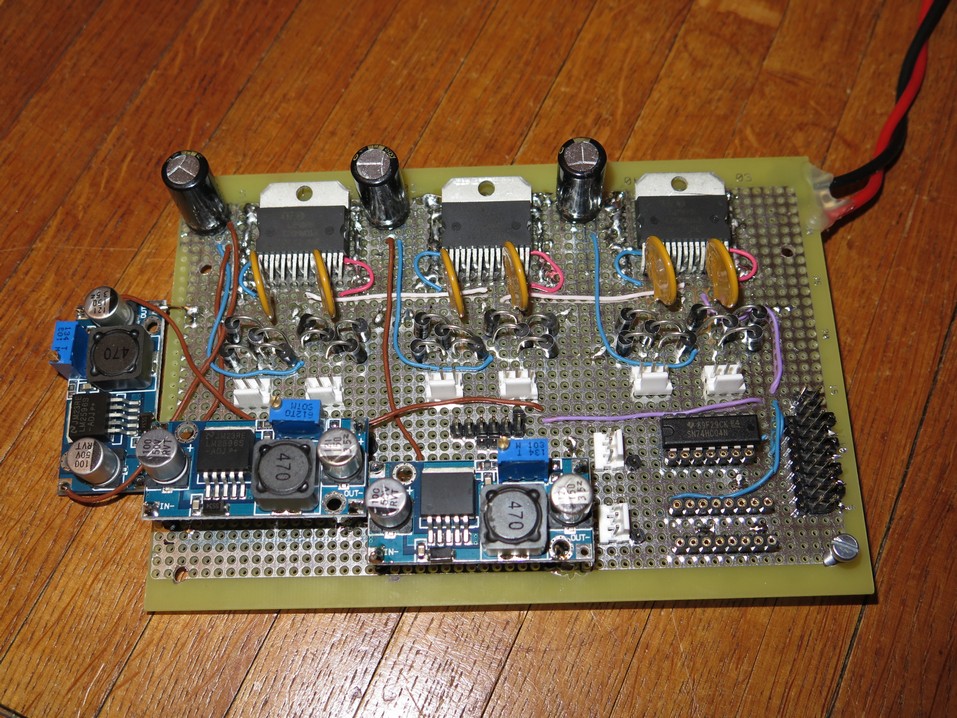
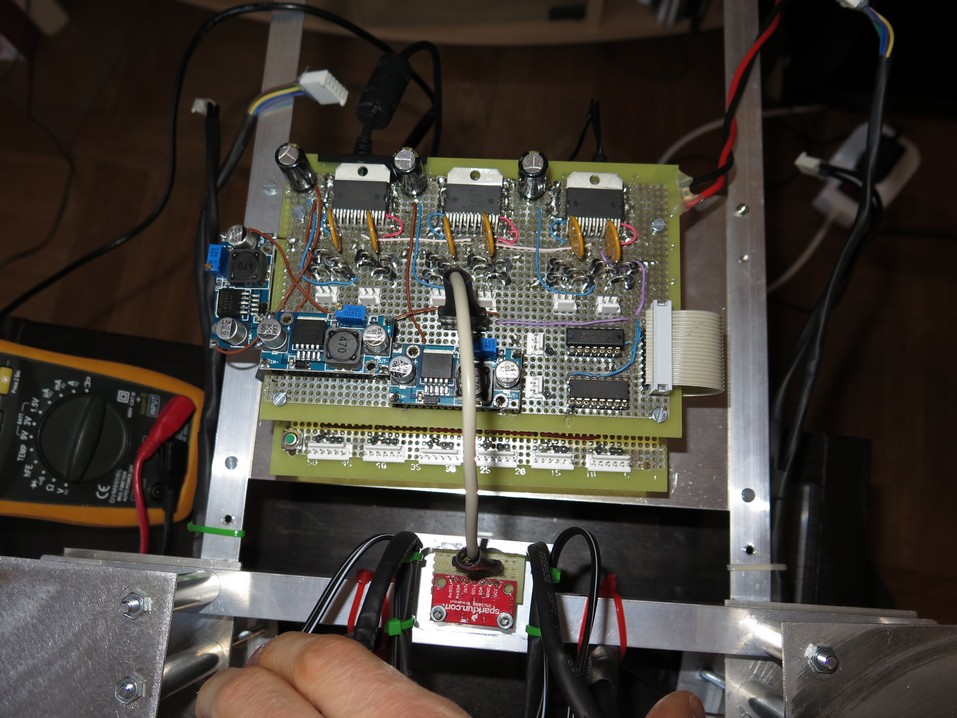
Electronique:
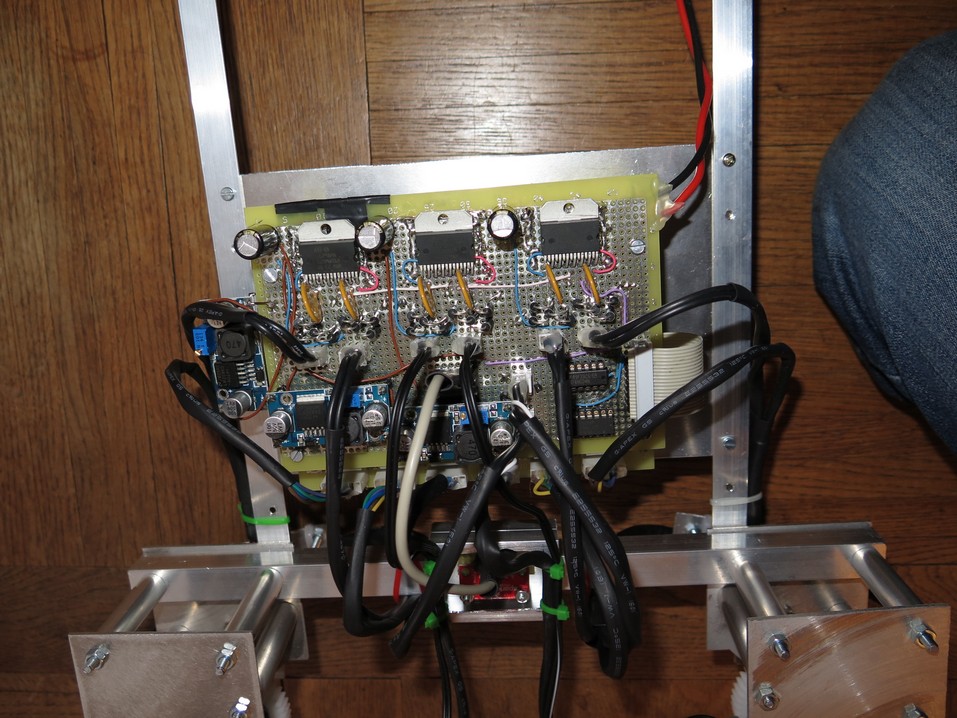
toute l'intelligence tient dans un petit microcontrôleur 32 bits ARM Cortex M3. Aucun PC. J'ai testé, la puissance de calcul est suffisante.
Le microcontrôleur fera tout : asservissement des articulations, interprétation de tous les capteurs (gyro y compris), tous les algos de la marche.
L'ensemble de l'électronique est "faite maison", comme à mon habitude. Cette électronique fait "old school", et j'adore ça!
Comme sur le drone BOB4 (voir signature), j'ai intégré une sécurité vitale : une télécommande (pour l'instant filaire) avec un interrupteur qui permet de couper toute la puissance, même si le microcontrôleur est planté.
Mécanique:
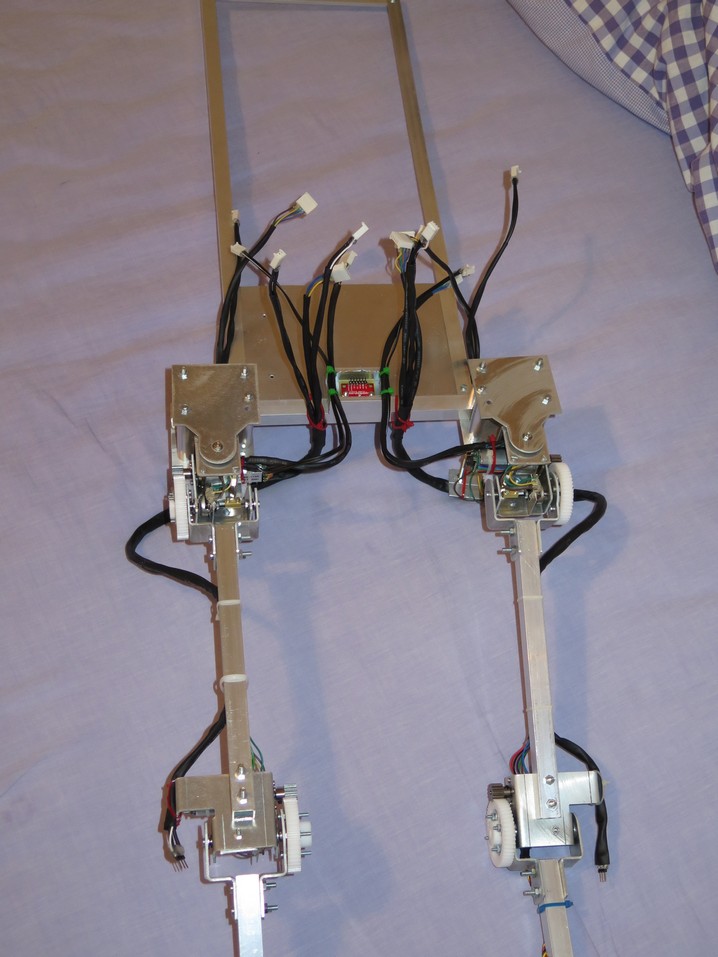
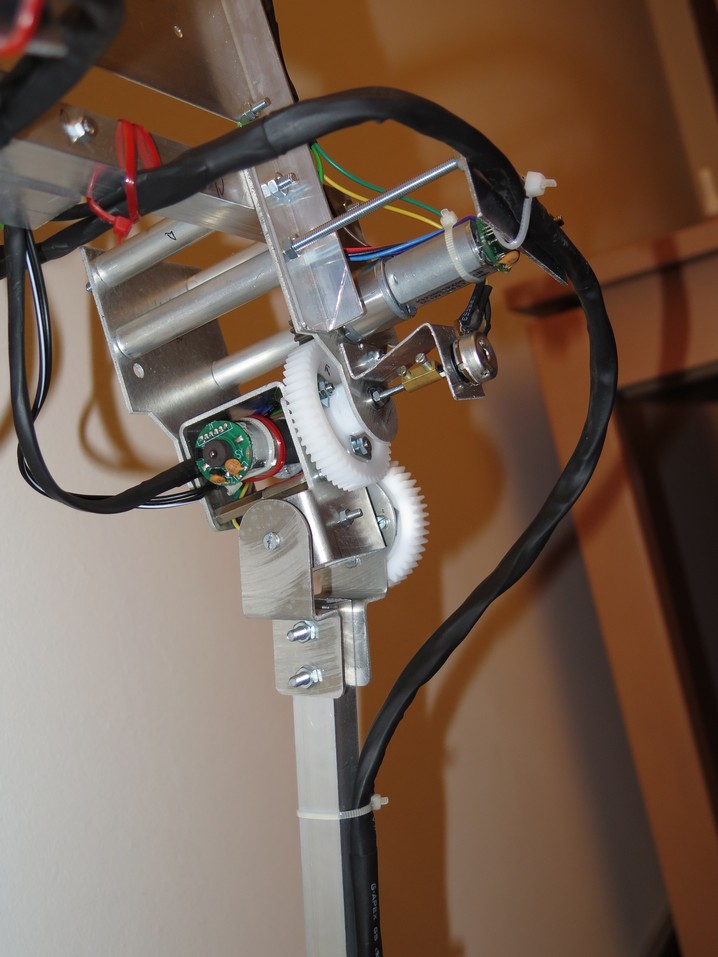
Les articulations et les "servos" ont été faits par mes soins avec des motoréducteurs, des engrenages, et des potentiomètres.
L'intérêt de ces assemblages par rapport aux servos classiques (ou dynamixel ou équivalents):
* les moteurs sont à l'air libre, donc refroidis naturellement
* les moteurs ont des encodeurs à leur cul, ça permet de faire un vrai asservissement rapide et précis
Les pièces en alu des articulations ont été réalisés sur mesure par une petite entreprise de chaudronnerie (ça ne veut pas dire qu'ils font des chaudrons, hein...)
Le reste des pièces, toute la structure, c'est des profilés alu.
Le torse est très haut pour augmenter au maximum le moment d'inertie, et donc faciliter l'asservissement. La batterie (350g) prend place tout en haut.
Toute la mécanique sera "réglable". Si je veux rallonger les jambes, élargir les hanches, agrandir le tronc, allonger les pieds, il me suffit de redécouper des profilés d'alu. C'est conçu pour ça.
Etat d'avancement:
La mécanique est à peu près finie. J'ai encore des problèmes de jeu à résoudre dans les hanches. Mais je m'attend à ce que quelque chose casse lors des premières utilisations réelles.
L'électronique aussi est terminée.
La programmation elle n'a pas commencée. J'ai juste testé que les capteurs et actionneurs fonctionnent depuis le microcontrôleur.
Il me reste dont énormément de travail, je ne suis qu'au tout début de l'aventure. Sans compter le nombre de misères qui vont m'arriver sur un tel projet aussi complexe!
Vision personnelle du projet:
J'avoue que la complexité de ce projet me fait vraiment peur. Je n'avais jamais passé autant de temps à une réalisation matérielle sur mes projets de bidouille. La mécanique, le câblage, et l'électronique, ça prend beaucoup de temps. Ca prend beaucoup plus de temps que si j'avais acheté des modules/servos/platines tous faits, mais justement, ça m'amuse de faire ça moi même.
Et puis, je me rend compte que je rêvais à ce genre de projet complexe depuis longtemps! Avec ce projet, ce sont mes rêves de gosse qui ressurgissent, ça fait du bien!
Leon.























![[En projet] Terran Task Force en 3D de 89 cm du haut avec des servomoteurs AX-12A - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)






