

 Mon contenu
Mon contenu Homme
Homme





J'en ai jamais utilisé donc je n'y ai même pas pensé 
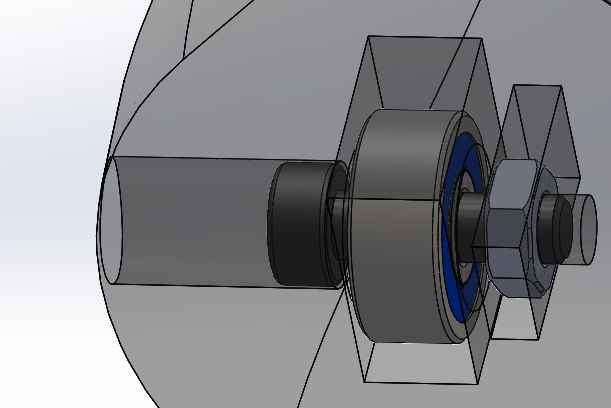
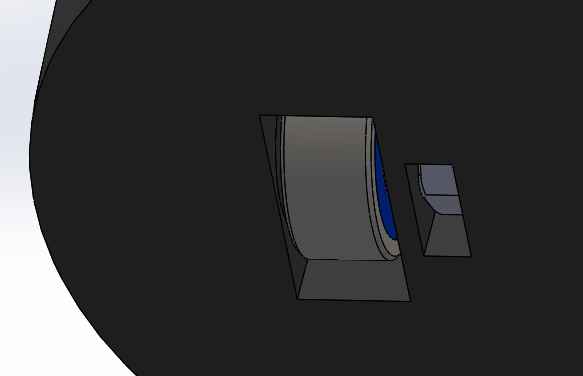
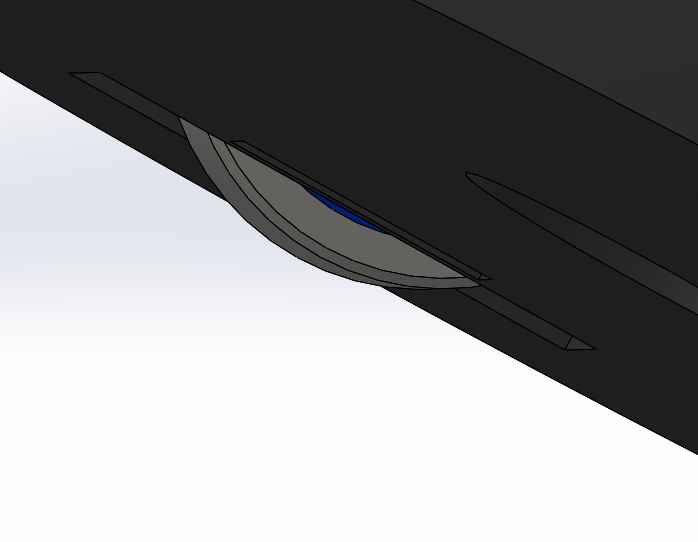
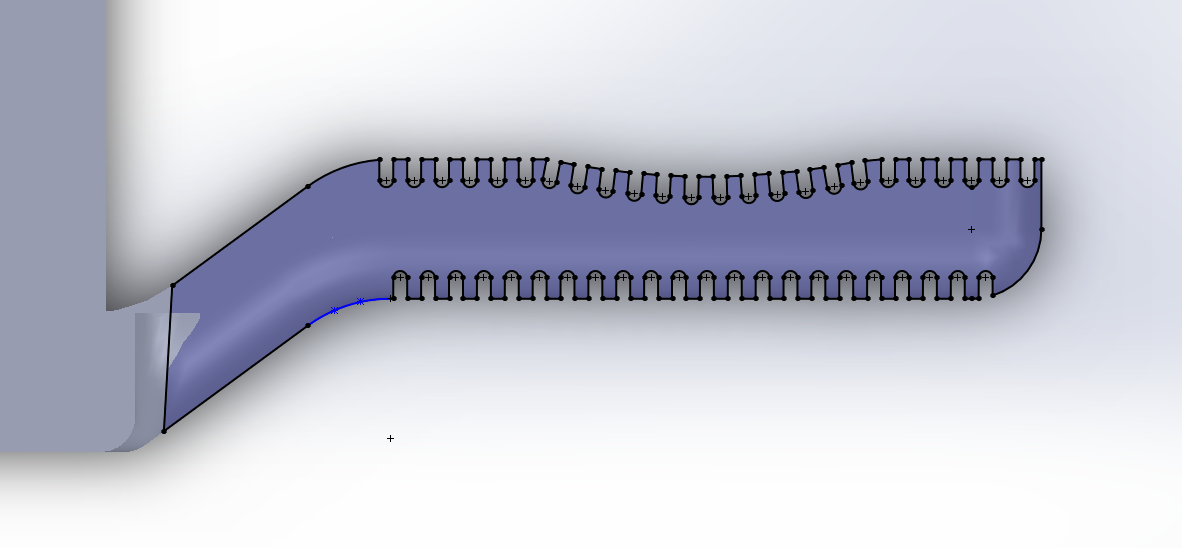
J'ai utilisé des minis roulements 623ZZ car il m'en restait vu qu'il y en a déjà sur le robot.
La base du robot se fait déjà comme ça :

Mais maintenant que tu me proposes des butées à billes, je vais garder l'idée dans un coin de ma tête pour mes futures projets car c'est plus propre que des roulements.
- Forthman aime ceci



 )
) 





 très bon résultats!
très bon résultats!



