Mon contenu
Mon contenu Homme
Homme





 Posté par
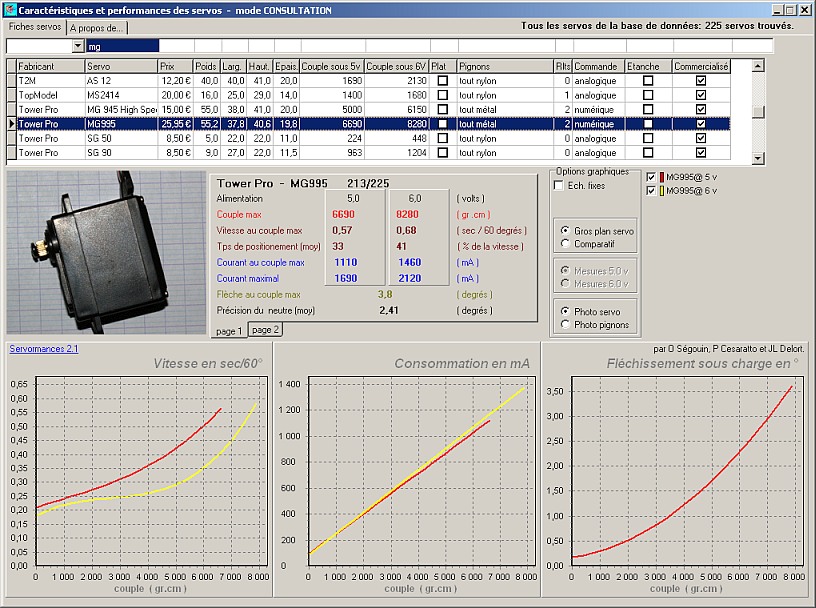
Posté par Juste pour infos, des aéromodélistes, Patrick Cesarato, Jean-Luc Delort et Olivier Segouin, ont créé deux bancs de test qui ont permis de mesurer les caractéristiques de plus d'une centaine de servomoteurs répertoriés dans la base de données Servomances .
Cf. http://www.teaser.fr/~osegouin/aeromode/servos.phtml et http://www.aeroglide.net/2013/02/servormances-mise-a-jour-fevrier-2013/
Edit : Par exemple, pour le MG995, ils ont créé la fiche suivante, où ils indiquent avoir trouvé un couple max de 6.690 à 5V et 8.280 à 6V.