 Mon contenu
Mon contenu Homme
Homme





Bonjour bvking,
Pour être certains de bien avoir compris tu veux implémenter:
y0 = f(t)
ton signal de base qui oscille entre 0 et pi
yi = f(t-i*0.5) avec i compris entre 1 et 9
Ludo
- Mike118 aime ceci

 Posté par
- 13 septembre 2022 - 08:17
Posté par
- 13 septembre 2022 - 08:17
Bonjour bvking,
Pour être certains de bien avoir compris tu veux implémenter:
y0 = f(t)
ton signal de base qui oscille entre 0 et pi
yi = f(t-i*0.5) avec i compris entre 1 et 9
Ludo
Posté par
- 10 juin 2022 - 07:48
Hello,
Si on fait l'analyse du système avec:
- ωo = la vitesse de la roue orange
- ωg = la vitesse de la roue grise
- ωb = la vitesse de la roue bleue
- ωv = la vitesse de l'arbre vert
- ωn = la vitesse de l'arbre noir
Si on pose que les vitesse sont positive quand elles rentrent dans le plan par le haut (pour ωo, ωv et ωn) et quand elle rentre dans le plan par la droite (ωg, ωb ) on peut écrire les équations:
ωv + ωg = ωo
ωv - ωg = ωn
ωn + ωb = 0
ωn - ωb = ωv
ωo = 3ω
Alors peut déduire que
2ωn = ωv
ωb = - ωn
ωg = ωn
3ωn = ωo
Et donc que
ωn = ωg = -ωb = ω
ωv = 2ω
ωo = 3ω
Ludo
Posté par
- 23 février 2022 - 10:55
Bonjour Phil2P,
pour moi ta méthode actuelle (le PC pour les calcules complexe et l'arduino pour le contrôle des moteurs) est la bonne.
Si je comprends bien le soucis actuelle c'est que l'arduino reçoit trop de trames que le système (arduino + bras) ne sait traiter et qu'il faut donc diminuer le nombre de trame (ou bien accéléré les éxecutions des trames mais ce n'est pas spécialement possible).
Tes 2 propositions vont marcher à mon avis mais je pense que réduire le nombre de trame envoyée par l'ordinateur sera le plus simple à implémenter. Une autre amélioration que tu peux ajouter c'est que l'arduino vide le buffer de la communication série et n'utilise que le dernier message complet (elle pourrait donc passer des trames).
Et pour mieux comprendre le problème, les trames que vous envoyez c'est pour juste obtenir une position finale ou bien vous voulez suivre une trajectoire précise ?
Bien cordialement,
Ludo
Posté par
- 01 janvier 2022 - 01:13
Hello,
Gérer une caméra avec un arduino c'est peut-être trop compliqué et directement utiliser une raspberry pourrait te faciliter la tâche (vu que tu as alors accès à open-cv pour faire de la reconnaissance d'image).
Mais sinon une idée à tester c'est d'utiliser un capteur de couleur sur le dernier chiffre et voir si la différence entre les chiffres est suffisante et pour être détectée.
Ludo
Posté par
- 15 mai 2021 - 04:11
Hello !
Ton arduino et ton node MCU ont tous les 2 un port série que tu pourrais donc utiliser pour envoyer l'info (le port série c'est ce que ton ordinateur et l'arduino utilise pour communiquer quand tu utilises le Serial monitor). Une autre possibilité c'est d'utiliser le protocol SPI (SCLK, MOSI, MISO). L'avantage de l'utiliser c'est de garder ton port série de dispo pour ton débugging. Ici vu que c'est l'arduino qui va envoyer les données, elle devrait être le master et ton node MCU le slave.
Je te mets 2 tutos pour t'aider 
- https://circuitdiges...cation-tutorial
- https://diyi0t.com/s...no-and-esp8266/
Ludo
Posté par
- 24 janvier 2021 - 07:22
Je ne suis pas du tout informaticien :')
En faisant des recherches je tombe bien sur des systèmes experts (même qui marchent en français, vous pouvez faire un tour sur Akinator). Qu'appelez vous programmer ? Car si c'est que vous montrez dans vos vidéos sur votre site on a aussi une définition différente de programmer.
"depuis 1986 que mon IA tourne en entreprise avec une centaine d’articles de presse dès 1986 (que je tiens à votre disposition) et un grand nombre de publications de ma part (dont un blog Wordpress de 300 pages racontant mon parcours et un groupe Facebook de 5000 membres) pas un seul scientifique, pas un responsable informatique n’a voulu en parler (l’attitude de Frédéric)"
En quoi ceci est une preuve que vous êtes le seul ? A la limite c'est une preuve que votre IA fonctionne. J'ai regardé les articles sur votre site (ceux dont le lien n'est pas mort). Le seul article que je classerai dans scientifique c'est celui qui est passé dans Science & vie (qui est un magazine de vulgarisation scientifique). Cependant en le parcourant ce n'est pas par quoi j’entends par "article scientifique". Votre nombre de publication n'est pas le reflet de la qualité de vos articles ni de votre système. Ce n'est pas avec votre comportement de cette sorte que des scientifiques vont s'intéresser à votre projet.
"cette remarque est un peu prétentieuse. Pour contester valablement il faut avancer des arguments"
J'ai avancé mes arguments.
"Non ! Et je n’en ai pas besoin. Il me suffit de savoir qu’elle marche depuis trente ans et que mes adversaires en IA n’ont rien trouvé à redire qui tienne la route. Il ne faut pas oublier que je suis face à des gens qui NE VEULENT PAS que ça marche, qui veulent garder leur science pour eux et méprisent l’utilisateur final."
Peut-être que vous, vous êtes convaincu et c'est très bien mais il faudrait pouvoir convaincre les autres.
"Il faudrait peut-être se donner la peine de définir l’IA « qui est la vôtre » que l’on puisse débattre"
Je l'ai donné donc il faudrait mettre un peu plus de rigueur dans la lecture des postes des autres membres sinon ça ne vaux pas le peine de vous répondre
Pour la démonstration, vous pouvez juste nous fournir une vidéo montrant vraiment ce que sait faire votre IA. Pour l'instant et je pense que c'est le cas des autres membres ayant vu la vidéos ne nous sommes pas convaincu.
Ne prenez pas ça personnellement mais de ce que j'ai pu vous lire vous être quelqu'un de fermé à la discussion et vous n'amenez pas des preuves concrètes ce qui fait que aucun de nous est convaincu.
PS: pas besoin de me répondre si ce n'est pour apporter des preuves/démonstration (et si vous voulez quand même me répondre à tout prix, ça sera signal radio de ma part).
Bonne soirée,
Ludo
Posté par
- 24 janvier 2021 - 03:13
Hello,
Pour répondre et avoir une discussion constructive
"Qu'est ce que de l'IA ?" C'est l'automatisation de l'intelligence qu'elle soit humaine ou animale, une fonction de base du vivant qui n'a rien d'extraordinaire car elle s'appuie sur le syllogisme : l'intelligence c'est le raisonnement sur la connaissance.
La définition d'intelligence artificielle va de part avec la définition d'intelligence: la partie "artificielle" vient faire la distinction entre ce qui est naturel (Chez les êtres vivants) et ce qui est artificiel (créé par les humains,...). Maintenant on a besoin d'une définition d'intelligence: l'intelligence peut-être décrite comme une faculté d'adaptation (apprentissage pour s'adapter à l'environnement) et/ou une faculté de modifier l’environnement. Votre définition semble plus restreinte que le consensus actuel. Ce qui amène selon moi les différences de point de vues (soulevée par Screetch). De plus le terme "automatisation" ne me semple pas adapté (Qui s'accomplit sans la participation de la volonté; Qui, une fois mis en mouvement, fonctionne de lui-même, opère par des moyens mécaniques; Qui s'accomplit avec une régularité déterminée).
Je suis le seul scientifique à avoir donné à l'intelligence une définition simple et claire, qui plus est, opérationnelle puisque c'est sur cette base que l'intelligence artificielle que j'ai développée s'est installée depuis trente ans dans les entreprises. J’attends toujours qu’elle soit contestée mais très peu s’y risquent. Or, le raisonnement est une fonction native de tous les processeurs qui explique la fiabilité de leurs résultats » : la logique de Boole.
Je me permets de remettre cette partie en doute. Pas que vous soyez scientifique (je ne suis pas la pour juger votre parcours) mais plus sur le reste:
- Avez vous des preuves que vous êtes le seul. Avez vous vérifier toutes définitions donnée par n'importe quel scientifique ? Comment jugez vous qu'une définition est simple, clair et opérationnelle (avis personnel, biais...) ?
- Vous attendez qu'elle soit contestée (je viens de le faire) mais est-ce qu'elle vraiment mise en devant sur la scène scientifique ? (Je peux écrire une définition dans mon coin et dire que personne ne la remet en question et donc qu'elle est vraie). Avez plutôt des preuves que cette définition est soutenue par des multiples scientifiques ? Et pourquoi cette définition n'est elle pas celle retenue par le consensus scientifique ?
- Il faudrait préciser que c'est le raisonnement logique qui est inhérent aux processeurs vu qu'il existe différents type de raisonnement
Je vous fait confiance sur la définition de système expert mais
Le système expert, s'il fait un vrai raisonnement (ce qui n'est pas le cas de ceux issus de la recherche officielle)
Vous veniez de dire que le raisonnement est "une fonction native de tout les processeurs" donc un simple programme qui fait un raisonnement logique en utilisant la logique de Boole contredit votre affirmation.
"Est ce qu'un système expert ça fait partie de L'IA?" : Oui ! C’est même la seule forme d'intelligence artificielle opérationnelle aujourd'hui. Car c'est la seule capable de réussir le test de Turing et de se passer de l'algorithmique réservée à des informaticiens longuement formés qui utilisent des langages spéciaux inconnus du commun des mortels. l'IA dont vous parlez, celle dont parlent les médias n'est pas de l'IA, c’est de la programmation classique effectuant des calculs. Donc une technique manuelle incapable de dialoguer plus que quelques minutes, d’expliquer ses résultats, de vérifier la cohérence des données, de s’autoprogrammer. Le programmeur donne des ordres à l’ordinateur (« instructions », « procédural », « machine de Turing ») comme les métiers à tisser Jacquard programmables du 18ème siècle (c’est dire la fantastique percée qu’aurait fait l’informatique en matière de développement de logiciels !). Il garde la connaissance par devers lui puis oublie ensuite. Une vraie catastrophe quand on pense au travail qu’il lui a fallu pour la recueillir, la tester, la valider. Vous comprendrez que la machine n’y comprend rien et ne peut pas être intelligente dans ces conditions. C’est le but recherché par les GAFAM et les chercheurs IA, tous informaticiens.
Vu qu'on a pas la même définition de IA, cela sert à rien de débattre sur la première partie. Par contre le test de Turing est seulement une proposition pour évaluer une intelligence artificielle. De plus ce test a été décrit en 1950 et demande peut-être une mise à jour par rapport à nos connaissances actuelles. De plus le test n'évalue que la partie intelligente que les humains peuvent réaliser et il y a dont toute une partie de l'intelligence qui ne peut-être évalué. Je vais passer la partie sur les informaticiens car ce n'est pas pertinent à mes yeux et limite complotiste.
« Est ce qu'un système expert n'est pas uniquement un algorithme classique qui ne sait que calculer des " non" des "ou" et des "et" sur ses conditions de départ ? » : Non, il ne calcule pas ! Il enchaîne des vérités (les règles). Un calcul ne peut expliquer ses résultats pour les faire accepter, un raisonnement si. Il utilise les ET pour enchaîner des vérités, les NON pour signifier la négation d‘un fait, les OU pour inclure des règles dans son raisonnement. Ce n’est aps du calcul c’est du raisonnement tout bête.
Un raisonnement logique peut-être fait sur base de calcul (opération logique: AND/OR/XOR). Personnellement j'aurais plutôt mis en avant la faculté des systèmes expert à engranger des connaissances. La j'ai l'impression que vous avez répondu à coté de ce que voulais dire Mike.
« Magnus carlsen pourquoi il a joué tel coup au échec pensez vous vraiment qu'il a calculé toutes les possibilités imaginable? » Non ! Le cerveau humain est incapable de mémoriser tous les coups possibles, il mémorise des structures favorables ou défavorables et RAISONNE. L’ordinateur, lui, mémorise des millions de coups, possibles, toutes les positions gagnantes, calcule des stats et choisit le coup statistiquement le meilleur, tout ça en quelques secondes, sans rien comprendre à ce qu’il fait. Aucun humain ne peut s’aligner. Et pourtant Kasparov a réussi à battre DeepMind aux échecs une ou deux fois ce qui montre l’extraordinaire puissance de l’intelligence. Avec l’intelligence on simule l’univers, pas avec le calcul.
C'est absolument faux. Mémoriser tout les coups possibles demanderait trop de mémoire pour avoir quelque chose de viable. Les IA (type AlphaGo) ne sont pas des bêtes table ou on trouve le meilleur coups avec l'état actuel du plateau. Sinon pourquoi son entrainement se ferait en jouant contre elle même ? l'IA raisonne elle aussi . Par contre je voudrais bien vous voir comment vous simuler l'univers en entier sans aucun calcul. Vous semblez vouloir faire la distinction entre raisonnement et calcul, pouvez vous expliquer précisément pourquoi ?
« Doit on utiliser l'intelligence artificielle partout ? » Oui, évidemment, puisqu’elle est à la portée de tous, programme à toute vitesse, ne connait pas les bugs et permet d’aborder des domaines nouveaux (conversationnels, simulation logique, test d’idées, programmation instantanée, détection, sauvegarde et validation des connaissances, aide au diagnostic, logiciels pédagogiques, etc.)
Je pense qu'il y a d'autres questions à explorer avant de pouvoir affirmer un oui catégorique comme l'utilisation énergétique. De même on pourrais développer sur les questions éthiques mais vu qu'on a eu divergence d'opinion sur la définition de base ça ne sert à rien selon moi vu qu'on ne vas pas parler de la même chose.
Et surtout, comme tous les informaticiens, il ne demande même pas une démonstration ! Pourquoi ? Parce qu'il ne veut pas voir une technologie qui rend inutile la programmation algorithmique donc son métier. Le pire ennemi de l'IA c'est l'informaticien. Il ne laissera jamais passer une technique qui permet à un ordinateur de programmer à sa place.
Par contre la encore vous semblez généraliser (alors qu'il me suffirait de trouver un informaticien qui demande une démonstration). Alors je vous demande moi une démonstration convaincante de ce que vous avancez
Ludo
Posté par
- 07 janvier 2021 - 08:27
Hello,
Je vais essayer de garder ce sujet à jour avec mon projet !
L'origine du projet
Il y a 5 ans, je me suis intéressé aux dispositions de clavier. En France et en Belgique, on utilise principalement l'AZERTY. Dans d'autres pays comme l'espagne ou les Royaumes-Unis on utile principalement le QWERTY mais il existe beaucoup d'autres dispositions comme le QWERTZ (Allemagne). L'AZERTY (d'abord le QWERTY qui a été adapté) a été pensé pour les machines à écrire: lorsqu’on tape sur une machine à écrire, il faut un mécanisme qui vienne écrire sur la feuille la lettre que l'on vient de taper. Un problème survient quand des touches proches physiquement sont appuyées dans un laps de temps trop réduit. Il a été alors pensé de séparer au maximum les combinaisons de touches pour accélérer la frappe. Mais maintenant le clavier azerty n'est plus du tout optimisé par une dactylographie rapide et aisée. J'ai alors décidé de passer au BÉPO qui est une disposition qui a été pensée pour être utilisée sur un clavier actuel: en plus de la disposition intelligent des touches, il profite pour retirer des caractère comme le mu grec et avoir accès plus facilement à des accents (bien sur le choix du BÉPO (optimisé pour le français) peut être discuté (par exemple pas spécialement plus optimisé pour l'écriture de code)). Cela fait donc 5 ans que je maitrise le BÉPO (réflexe musculaires) mais j'ai envie d'aller plus loin dans l'ergonomie sur un clavier et d'essayer de corriger certains problèmes que j'ai pu rencontrer avec le BÉPO.
Le projet
Mon but serait de réaliser un clavier ergodox (https://ergodox-ez.com/)

Le principe de ce clavier est d'être plus ergonomique:
- Le fait d'être un clavier mécanique (opposé à un clavier à membrane)
- La division du clavier en 2 parties permet de réduire le stress imposé aux poignets (ne pas les forces dans une certaine position)
- Clavier ortholinéaire: les touches sont alignée verticalement
- Inclinaison variable du clavier
- Repose poignets
Mais il y a aussi pas mal de feature du côté du software qui m'intéresse.
J'ai donc pour but de réaliser un clavier de ce style la. Il y a certains que je veux pourvoir changer sur ce clavier ce que je ne pourrais pas faire sur un clavier acheté (ou plus difficilement). Bien sur si je n'arrive pas à la fin de mon projet acheter le produit fini est une option envisageable. J'aurais pu aussi regarder d'autres claviers distribués mais l'ergodox convient à ce que je recherche dans un premier temps. Par chance le clavier ergodox est un projet opensource https://www.ergodox.io/
Ce que je veux changer.
Dans un premier temps je vais regarder l'électronique du projet. Ce que je veux changer par rapport à la version open-source:
- Rendre chaque moitié indépendante. Actuellement seul la moitié de gauche est master et celle de droite est slave. Cependant il faut pouvoir garder une certaines synchronisation entre les 2 claviers (si on change de layout).
- Utilisation de l'usb C pour connecter un clavier à l'ordinateur: Actuellement les claviers utilisent encore un port micro-usb.
- Utilisation d'un cable usb C pour connecter les claviers entre eux: Actuellement les claviers sont relié via un cable jack-jack
- Intégration dans le clavier d'un port usb supplémentaire (et donc la création d'un hub usb)
- L'ajout d'un port pour ajouter des leds adressables
- Déport des leds d'indication (ils utilisent des leds sous les touches mais je voudrais déplacer ces leds autre part que sous des touches).
- Garder un seul et même pcb pour les 2 moitiés
J'ai déjà commencé à implémenter ces changements sur le pcb
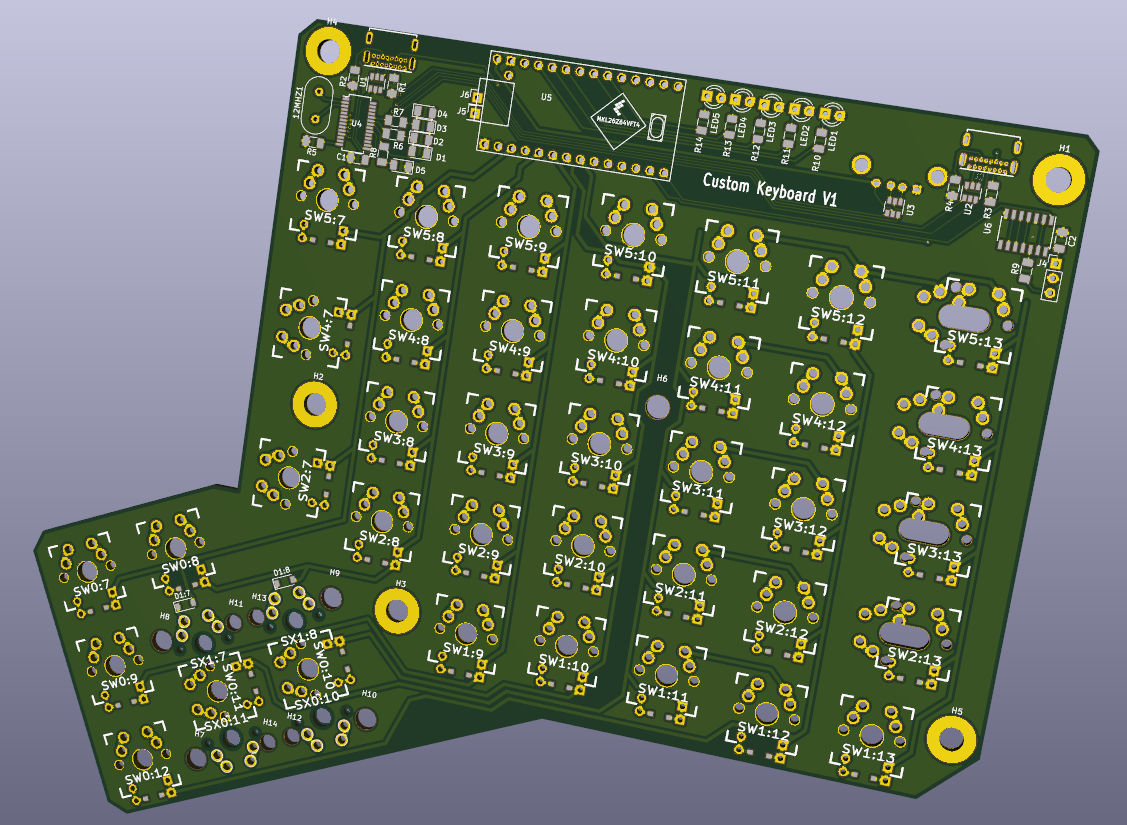
Mais il faut encore que je fasse une vérification complète du pcb et que j'établisse un BOM avant de pouvoir commander
Ludo
Posté par
- 12 décembre 2020 - 06:17
Posté par
- 26 septembre 2020 - 01:58
Je continue mes recherches et je suis tombé sur le projet de precious plastic qui a pour but d'améliorer le recyclage du plastique en général. De ce que j'ai compris ils ont divisé le recyclage en différent rôle pour former un réseau (point de collecte, création de copeaux, création de plaque/profilé/..., création de machine). Ils ont une carte avec les différents rôles (https://community.pr...plastic.com/map)
Posté par
- 25 septembre 2020 - 10:52
Je viens de voir que Arianeplast récupère les chutes de PLA (http://forum.fablab.fr/topic/343/recyclage-des-chutes-de-pla/2)
Posté par
- 16 septembre 2020 - 02:28
Hello,
plusieurs questions:
- Est-ce qu'il y a vraie contrainte qui t'empeche de relier tes boitiers de régulation en // de ton automate ?
- Est-ce que ton automate ne peut pas dupliquer ton signal (il me semble que c'est possible avec certains automates) ?
Sinon 0.1 V c'est pas une grosse contrainte pour un circuit et vu que la température ne varie pas rapidement, il n'y a pas énormément de contraintes et j'ai l'impression qu'un simple montage follower avec un AOP serait suffisant.
Ludo
Posté par
- 03 septembre 2020 - 05:57
Il me semble que le code de Mike (pour Turboseb) permettait de détecter les fronts montant et d'appliquer un pulse en sortie (déphasé en fonction de la fréquence). Donc dans un premier temps tu peux déjà utiliser ce code (quitte à modifier la fonction qui calcule le déphasage pour retourner une valeur constante et voir si ça marche). Et techniquement pour détecter un front montant, on doit juste trouver les changements d'états et regarder l'état final.
Posté par
- 25 août 2020 - 01:20
Un truc qui me chiffone c'est que dans le projet de turboseb, il traitait son signal d'entrée pour avoir un signal carré, ce qui n'est pas le cas chez toi. Ce qui à mon avis n'aide pas pour avoir quelque chose qui fonctionne. Et pour l'autre partie tu peux modifier le code existant pour ne pas faire des impulsions de durée fixe mais variable pour pouvoir répliquer ton signal
Posté par
- 08 août 2020 - 01:33
Hello,
Petit conseil, exporte des schématique sous fond blanc car la c'est illisible (J'ai l'impression de reconnaitre eagle et c'est très simple de le faire)
Pour ce qui est de flasher ton STM avec l'ordinateur je te conseille de regarder du côté du protocole SWD: tu auras besoin de branché quelques pins vers un header externe et le plus simple c'est d'utiliser un ST-Link (V2 ou V3) pour pouvoir flasher. Tu dois aussi avoir le control sur ton port Nrst et au moins mettre BOOT0 à la masse. Il faut aussi connecter tes VDD ensemble à ta tension d'alimentation et tes VSS à la masse avec des capacité de découplage.
Un autre élément important qu'il manque à ton schéma c'est un oscillateur.
Si tu n'as jamais travaillé avec un stm32 je te conseillerai au moins de suivre un tuto complet sur comment faire des circuits avec. Une alternative est de tourner vers un Nucleo et de faire un pcb "bridge" que tu vas link sur ton nucleo pour y ajouter les éléments qui manque à l'interface. Le nucleo te permet de ne pas devoir penser à comment router ton stm et il a l'interface jtag pour flasher ton stm intégré.
Sinon en remarque général tu peux utiliser des labels sur tes fils pour pas avoir un schéma spaghetti.
Je suis pas un pro du stm mais ça demande pas de boulot de partir de 0 mais bonne chance si tu continues sur cette voie la
Ludo

