Mauvaise journûˋe en perspective car les dialogues entre un humain et un ordinateur ne sont jamais trû´s faciles û ûˋtablir. Aussi, quand sur le planning de la journûˋe nous constatons qu’il va falloir ûˋtablir des communications entre la sonde et le pupitre de maûÛtrise local, nous ne nous sentons pas trû´s û l’aise. Le pire, c’est que pour des raisons budgûˋtaires le Terminal de dialogue sera le Moniteur de l’IDE. Aucune dûˋpense particuliû´re pour piloter û distance JEKERT, en contrepartie il va falloir gûˋrer la ligne sûˋrie, avec toutes ces complications de conversions de chaûÛnes de caractû´res en nombres. Heureusement qu’û la RMSI nous avons ûˋtûˋ sûˋrieusement formûˋs û la programmation des puissants petits ordinateurs Arduino. Sans plus tarder on pûˋnû´tre dans la salle informatique S4. Gentiment, un technicien nous dûˋsigne un grand bureau libre sur lequel nous allons ûˋtablir les protocoles d’ûˋchanges entre la machine ûˋlectronique embarquûˋe et le Terminal de dialogue.
Notions rudimentaires de dialogue Homme / Machine.
Prûˋtendre en un chapitre couvrir intûˋgralement le sujet relû´ve d’une utopie totale, car un livre gros comme une bible n’y suffirait pas. Dans ces lignes, nous allons ne faire qu’effleurer le sujet. Le juste ce qu’il faut pour comprendre comment vont se dûˋrouler les bavardages entre le bel insecte et la console de maûÛtrise. Pour commencer, on va considûˋrer que la sonde est notre esclave, et nous les maûÛtres. Dans un tel cas de figure, l’esclave se place û l’ûˋcoute et attend une consigne. Dû´s qu’un message arrive par l’entremise d’un canal filaire ou hertzien, l’esclave l’enregistre. Puis, il en analyse le contenu. Soit il comprend tout, soit dans le texte reûÏu, un petit chmolductruc n’est pas prûˋvu dans le langage qu’il connaûÛt. Dans les deux cas il accuse rûˋception en parlant û son tour. Gûˋnûˋralement si l’ordre reûÏu n’est pas cohûˋrent, l’esclave se remet û l’ûˋcoute aprû´s avoir prûˋvenu le maûÛtre. Si la consigne est conforme au langage convenu, l’esclave va alors exûˋcuter les actions qui dûˋcoulent de la tûÂche imposûˋe.
Notez au passage que ce type d’ûˋchanges est dit en ô¨ô Mode Alternatô ô£ par opposition au ô¨ô Duplexô ô£ pour lequel les deux entitûˋs peuvent parler et ûˋcouter simultanûˋment. En Alternat un seul canal suffit, alors qu’en Duplex il en faut deux.
RESUMû d’un dialogue Homme/Machine de type MaûÛtre/Esclave :
Comme pour tout ûˋchange d’informations entre deux entitûˋs, un langage prûˋcis a ûˋtûˋ dûˋveloppûˋ. Ce langage inclus des mots, de la syntaxe, de la ponctuation etc. Gûˋnûˋralement ûˋlûˋmentaire dans le monde de la technique, il porte souvent le nom de ô¨ô Protocole conversationnelô ô£.
ã L’esclave est û l’ûˋcoute permanente sur le canal de dialogue.
ã Le maûÛtre parle et transmet une consigne puis repasse immûˋdiatement û l’ûˋcoute.
ã L’esclave rûˋceptionne l’ordre et en analyse la syntaxe.
ã Syntaxe correcte ou polluûˋe, l’esclave Accuse Rûˋception.
ã Si la consigne est cohûˋrente, l’esclave rûˋalise les actions associûˋes et repasse û l’ûˋcoute. (1)
ã Si la consigne n’est pas intûˋgralement correcte, l’esclave ne fait rien et repasse û l’ûˋcoute.
 (1) : ûventuellement un deuxiû´me accusûˋ de rûˋception peut ûˆtre envisagûˋ, message dans lequel l’esclave prûˋcise s’il a ûˋtûˋ en mesure de s’acquitter de la tûÂche ou si un alûˋa û empûˆchûˋ son dûˋroulement. C’est le protocole envisagûˋ qui peut imposer cette deuxiû´me transmission.
(1) : ûventuellement un deuxiû´me accusûˋ de rûˋception peut ûˆtre envisagûˋ, message dans lequel l’esclave prûˋcise s’il a ûˋtûˋ en mesure de s’acquitter de la tûÂche ou si un alûˋa û empûˆchûˋ son dûˋroulement. C’est le protocole envisagûˋ qui peut imposer cette deuxiû´me transmission.
La Fig.28 rûˋsume ce que sera la boucle de base qui animera le gros insecte artificiel. On constate qu’elle ne contient que peu de chose, et codûˋ en C++ ne consommera que quelques lignes de programme. Tout le travail sera effectuûˋ dans des subroutines diverses se chargeant des traitements particulier dont l’Analyseur Syntaxixe entre autres. Les actions effectuûˋes dans les deux premiers tests en bleu et le travail du pavûˋ rose sont incluses dans la procûˋdure Attendre_une_chaûÛne(). Cette derniû´re utilise les routines du langage C++ d’Arduino qui imposent pour stocker le texte reûÏu dans une String de dûˋfinir une sentinelle qui indique au processus que le message textuel est complet.
Les protocoles de dialogue avec la sonde JEKERT.
ûtablir un protocole de dialogue entre l’humain et une quelconque machine informatique consiste û construire une grammaire stricte aussi simple que possible. Ce que nous devrons frapper au clavier ne devra pas nous imposer de constants appels au manuel. Il importe donc de dûˋfinir des messages aussi ô¨ô naturelsô ô£ que possible. Par ailleurs plus ces textes seront courts, moins l’encombrement logiciel sera important. Enfin, les textes choisis pour donner des consignes û la machine devront ûˋliminer toute ambiguû₤tûˋ û l’Analyseur Syntaxique, c’est û dire la sûˋquence de programme qui sur la machine qui ô¨ô ûˋcouteô ô£ balayera intûˋgralement les informations reûÏues pour vûˋrifier qu’elles respectent aveuglûˋment et totalement les conventions retenues.
rûˋliminaires û ce projet, des ûˋtudes initiales semblent dûˋmontrer que nous aurons besoin d’envoyer deux types de consignes û notre lointaine voyageuse. En exploitation sur site, globalement on lui demandera d’exûˋcuter l’un des programmes prûˋenregistrûˋs. Toutefois, pour des applications particuliû´res il sera commode de pouvoir imposer une orientation spûˋcifique û un moteur individuel. Bien que sur Mars piloter un seul moteur manuellement sera relativement peu frûˋquent, pour le dûˋveloppement du logiciel il sera indispensable de pouvoir faire bouger chaque ûˋlûˋment individuellement, et tout particuliû´rement pour les ûˋtudes morphologiques ou des configurations spûˋcifiques. Par ailleurs, pour simplifier le matûˋriel on va instaurer un dialogue de type Alternat.
Voie montante, voie descendante : Avant de poursuivre cette ûˋtude, vous trouverez un rûˋsumûˋ du Protocole Conversationnel retenu dans la Fiche nô¯5 Protocoles de dialogues avec la sonde. Il y est fait mention de ô¨ô voie montanteô ô£.ô De quoi s’agit-il ?
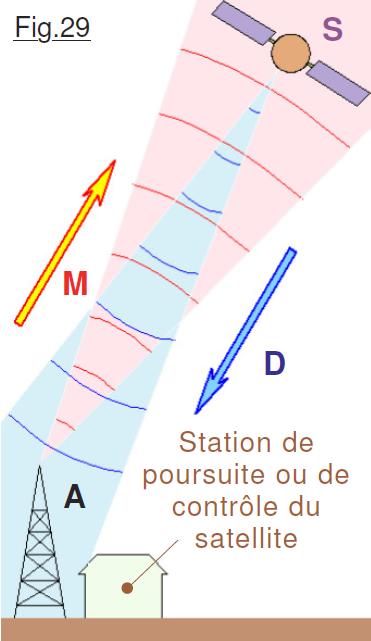 Considûˋrons la Fig.29 sur laquelle S reprûˋsente un satellite de tûˋlûˋcommunication en orbite terrestre, ou une sonde posûˋe sur Mars par exemple. Au sol une station radio de poursuite peut envoyer des signaux ou en recevoir par son antenne A. Par dûˋfinition les ondes qui partent du sol vers S constituent la voie montante M quel que soit le nombre de canaux de communication ou leur bande passante. Les ondes qui partent de S et qui reviennent vers le sol constituent par dûˋfinition la voie descendante.
Considûˋrons la Fig.29 sur laquelle S reprûˋsente un satellite de tûˋlûˋcommunication en orbite terrestre, ou une sonde posûˋe sur Mars par exemple. Au sol une station radio de poursuite peut envoyer des signaux ou en recevoir par son antenne A. Par dûˋfinition les ondes qui partent du sol vers S constituent la voie montante M quel que soit le nombre de canaux de communication ou leur bande passante. Les ondes qui partent de S et qui reviennent vers le sol constituent par dûˋfinition la voie descendante.
Dans notre cas, les signaux de contrûÇle sont issus du P.C. Quand la ligne USB transmet vers Arduino, c’est donc la voie montante, alors que les Accusûˋs de rûˋception reprûˋsentent la voie descendante.
La voie montante.
Prûˋpondûˋrante en termes de convivialitûˋ il faut penser ô¨ô SIMPLEô ô£ car c’est elle qui conditionne les ordres envoyûˋs par le terminal informatique. Les messages doivent ûˆtre les plus ûˋlûˋmentaires possibles et immûˋdiats û coder. Aussi, ils commenceront par ô¨ô mô ô£ pour une consigne moteur, et par ô¨ô pô ô£ pour invoquer un programme. On se cantonne volontairement sur des caractû´res minuscules ûˋvitant ainsi d’avoir û mobiliser la main gauche pour appuyer sur SHIFT. Elle peut alors servir û tenir un moteur dans la main etc. Incontournable pour pouvoir exploiter les chaûÛnes de caractû´res de type String arrivant sur la ligne USB, tous nos ordres devront s’achever par une ô¨ô sentinelleô ô£. C’est un caractû´re que l’on peut choisir librement et qui indique la fin d’un ô¨ô blocô ô£ de caractû´res û rûˋceptionner par le programme. Ce caractû´re ûˋtant arbitraire, j’ai choisi ô¨ô *ô ô£ qui sera facile û vûˋrifier sur les ACR et se trouve sur le pavûˋ numûˋrique. (ACR : ACcusûˋs de Rûˋception.)
Pour invoquer un programme il suffira d’indiquer son numûˋro obligatoirement sur deux chiffres.
Exemple : p08*ô ô ou encore p12* etc. Imposer un caractû´re ô¨ô 0ô ô£ pas vraiment utile en tûˆte peut sembler un arbitraire pas trû´s dûˋgourdi. Ce choix s’impose toutefois car le dûˋveloppement du logiciel a montrûˋ qu’il permet de simplifier grandement le codage de l’analyseur syntaxique.
Piloter manuellement un moteur exige d’indiquer lequel et la position qu’il doit adopter. La consigne sera de la forme : ô¨ô mNôÝPP*ô¨ô . Le caractû´re ô¨ô mô ô£ prûˋcise qu’il s’agit d’une consigne de motorisation. Le paramû´tre N dûˋsigne le numûˋro du moteur et sera compris entre [1 et 12]. Attention, ne pas mettre un zûˋro en tûˆte. Le numûˋro de moteur sera obligatoirement suivi du signe ô¨ô –ô ô£ ou ô¨ô +ô ô£ pour la position, y compris pour le neutre opûˋrationnel zûˋro. Enfin PP prûˋcise la position angulaire û atteindre codûˋ sur un ou deux chiffres la valeur ûˋtant comprise entre [0 et 90].
Exemple : ô¨ô m2+45*ô ô£ placera le moteur nô¯2 û la position +45ô¯.
ô ô ô ô ô ô ô ô ô ô ô ô ô ô ô ô¨ô m11-23*ô ô£ orientera le moteur nô¯11 û la position +23ô¯.
L’analyseur syntaxique.
Primordial si l’on dûˋsire ûˋviter que la motorisation ne se comporte de faûÏon complû´tement inattendue, l’esclave qui rûˋceptionne un ordre doit le comprendre intûˋgralement. Si une seule ô¨ô virguleô ô£ n’est pas prûˋvue dans les Protocoles Conversationnels, il ne doit surtout pas ô¨ô prendre des initiativesô ô£. Aussi, si l’humain qui a envoyûˋ un ordre par le clavier s’est trompûˋ, la sonde ne doit strictement rien faire, et se contenter d’accuser rûˋception en prûˋcisant qu’elle ne comprend pas ce qu’on lui demande. Pour rendre compte de sa perplexitûˋ, JEKERT se contentera de signaler une erreur suivie de sa classification. La Fiche nô¯5 Protocoles de dialogues avec la sonde donne la liste des erreurs qui seront dûˋtectûˋes par l’analyseur syntaxique. Concrû´tement, c’est une procûˋdure qui balaye caractû´re par caractû´re l’ordre rûˋceptionnûˋ et en dûˋcortique le contenu. Si ce dernier est conforme au langage dûˋfini pour le protocole, elle en extrait les divers ûˋlûˋments pertinents. (Nô¯ de programme û invoquer, nô¯ de moteur concernûˋ, l’angle û balayer et le sens de rotation.) Dû´s qu’une incohûˋrence est rencontrûˋe, l’analyse classifie l’erreur dûˋtectûˋe, le processus s’arrûˆte et la sonde accuse alors rûˋception en indiquant ce qui ne va pas.
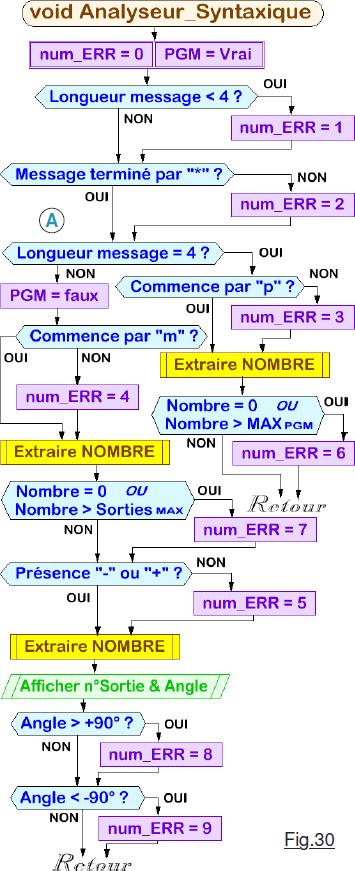 C’est le programme P03_Envoyer_des_consignes.ino qui a ûˋtûˋ utilisûˋ pour dûˋvelopper le dialogue Homme/Machine et nous octroie la facilitûˋ de bavarder avec JEKERT. Fiche de protocole en main, on peut envoyer des messages corrects, des consignes volontairement erronûˋes et observer ce que rûˋpond la sonde. Par exemple testez des messages trop longs qui dûˋpassent 15 caractû´res, des nô¯ de moteur anormaux, oubliez le ô¨ô mô ô£ ou le ô¨ô pô ô£ etc. Tentez d’expûˋrimenter toutes les erreurs rûˋpertoriûˋes par l’analyseur syntaxique. Le petit programme dûˋmonstrateur fonctionne intûˋgralement sur la ligne USB et avec le Moniteur de l’IDE. Rien n’est obligatoire sur Arduino, mais vous pouvez laisser branchûˋe l’interface et la motorisation. Un petit bruiteur est ajoutûˋ et pilotûˋ par la sortie binaire D2. Il est clair que sur Mars il n’y aura pas grand monde pour l’ûˋcouter. Par contre, quand on dûˋveloppe les programmes, chaque erreur s’accompagne d’un petit BIP d’alerte qui attire l’attention du programmeur. Nous savons alors que l’ordre envoyûˋ n’est pas correct, ce qui incite û regarder l’ûˋcran. Vous allez vous rendre compte que focalisant sur le fatras mûˋcanique et ûˋlectrique, on finit par oublier l’ûˋcran de l’ordinateur. Aussi, si un moteur ne fait pas ce qui est attendu, le BIP nous ûˋvite de rester dubitatifs en supposant que le programme testûˋ n’est pas correct. On regarde alors l’ûˋcran et l’erreur de frappe ûˋtant prise en compte on peut rûˋitûˋrer la consigne prûˋvue lors du test actuellement en cours. Notons au passage que c’est le test A qui sur une longueur d’exactement quatre caractû´res en dûˋduit qu’en principe il s’agit d’une consigne relative û l’appel d’un programme. Enfin, on observe que la dûˋtection d’une erreur n’ûˋcourte pas l’analyse syntaxique. Ainsi la procûˋdure est plus simple et consomme moins d’octets car on va constater assez rapidement que l’espace mûˋmoire pour loger notre programme risque d’ûˆtre un peu lûˋger, il se trouve que le cahier des charges est assez ambitieux !
C’est le programme P03_Envoyer_des_consignes.ino qui a ûˋtûˋ utilisûˋ pour dûˋvelopper le dialogue Homme/Machine et nous octroie la facilitûˋ de bavarder avec JEKERT. Fiche de protocole en main, on peut envoyer des messages corrects, des consignes volontairement erronûˋes et observer ce que rûˋpond la sonde. Par exemple testez des messages trop longs qui dûˋpassent 15 caractû´res, des nô¯ de moteur anormaux, oubliez le ô¨ô mô ô£ ou le ô¨ô pô ô£ etc. Tentez d’expûˋrimenter toutes les erreurs rûˋpertoriûˋes par l’analyseur syntaxique. Le petit programme dûˋmonstrateur fonctionne intûˋgralement sur la ligne USB et avec le Moniteur de l’IDE. Rien n’est obligatoire sur Arduino, mais vous pouvez laisser branchûˋe l’interface et la motorisation. Un petit bruiteur est ajoutûˋ et pilotûˋ par la sortie binaire D2. Il est clair que sur Mars il n’y aura pas grand monde pour l’ûˋcouter. Par contre, quand on dûˋveloppe les programmes, chaque erreur s’accompagne d’un petit BIP d’alerte qui attire l’attention du programmeur. Nous savons alors que l’ordre envoyûˋ n’est pas correct, ce qui incite û regarder l’ûˋcran. Vous allez vous rendre compte que focalisant sur le fatras mûˋcanique et ûˋlectrique, on finit par oublier l’ûˋcran de l’ordinateur. Aussi, si un moteur ne fait pas ce qui est attendu, le BIP nous ûˋvite de rester dubitatifs en supposant que le programme testûˋ n’est pas correct. On regarde alors l’ûˋcran et l’erreur de frappe ûˋtant prise en compte on peut rûˋitûˋrer la consigne prûˋvue lors du test actuellement en cours. Notons au passage que c’est le test A qui sur une longueur d’exactement quatre caractû´res en dûˋduit qu’en principe il s’agit d’une consigne relative û l’appel d’un programme. Enfin, on observe que la dûˋtection d’une erreur n’ûˋcourte pas l’analyse syntaxique. Ainsi la procûˋdure est plus simple et consomme moins d’octets car on va constater assez rapidement que l’espace mûˋmoire pour loger notre programme risque d’ûˆtre un peu lûˋger, il se trouve que le cahier des charges est assez ambitieux !
NOTE : Ce que ne montre pas l’organigramme de la Fig.28 c’est que l’accusûˋ de rûˋception de type ERREUR engendre ûˋgalement le BIP sonore d’avertissement pour l’opûˋrateur.
Maintenant que les protocoles de dialogue du MaûÛtre vers l’Esclave sont convenus des deux cotûˋs de la ligne de transmission, il reste û ûˋtablir les conventions pour la rûˋponse. (C’est û dire l’ACR)
La voie descendante.
Quand c’est au tour de la sonde û bavarder pour rendre compte par un accusûˋ de rûˋception, la ligne USB vers l’ordinateur et l’ûˋcran du Moniteur de l’IDE constitue techniquement la voie descendante. Nous sommes en mode alternat. Systûˋmatiquement les ACR seront encadrûˋs par un caractû´re ô¨ô !ô ô£ pour en dûˋlimiter le dûˋbut et la fin. Dans le cas d’une consigne ô¨ô polluûˋeô ô£ le programme se contente de retourner un compte rendu de la forme :
m25+45* > Sortie 24 Angle 45 !ERR 7!
Dans tous les cas il y a recopie du message mûˋmorisûˋ dont la longueur sera tronquûˋe û sept caractû´res si on en a frappûˋ plus au clavier avant de valider. (Sept ûˋtant l’espace rûˋservûˋ pour la chaûÛne de rûˋception.) Puis, suivi de ô¨ô >ô ô£ la consigne interprûˋtûˋe. Enfin !OK! si l’ordre est cohûˋrent, soit le texte laconique !ERR 7! qui prûˋcise la classification de l’erreur. Le message d’alerte s’accompagne comme dûˋjû prûˋcisûˋ d’un BIP sonore. Notez que le nô¯ d’erreur correspondra au dernier problû´me
rencontrûˋ puisque l’analyse s’effectue intûˋgralement quoi qu’il arrive.
La suite est ici.