Mon contenu
Mon contenu Homme
Homme






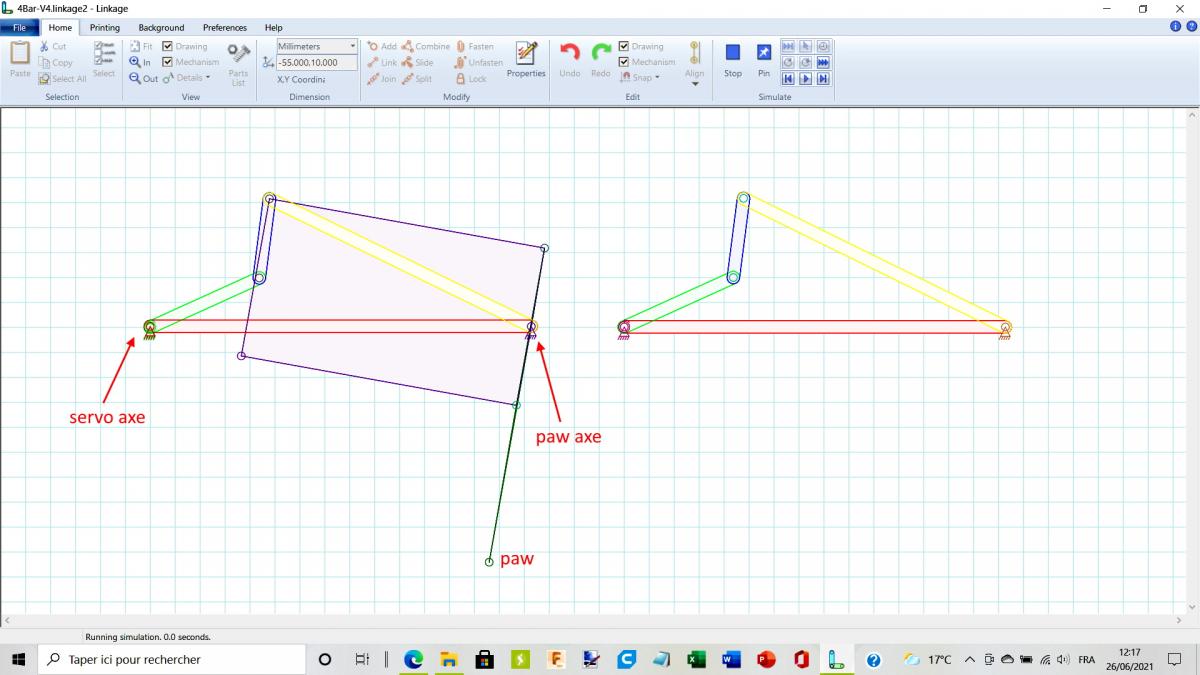
Ma solution de cinématique inverse pour le troisième degré de liberté est tellement simple que j'en ai doutée. J'ai donc envisagé de la valider par une simulation graphique.
Quand je dis MA solution, je n'ai sans doute rien inventé, mais je la fais mienne, car ne comprenant rien aux explications que j'ai pu lire sur le sujet, je l'ai trouvé et sans doute réinventé tout seul, comme un grand. Mon niveau en maths étant quasi nul, j'ai mis 3 mois pour valider et écrire moins de 10 lignes de code. 
Au début, j'ai essayé avec GeoGebra, mais sans succès, alors je me suis tourné vers VPython en utilisant l'interface GlowScript, https://www.glowscript.org/, puis Visual Studio Code (merci Melmet).
J'ignore pourquoi Python a tant de succès. Je trouve ce langage assez décevant, mais il me semble qu'aujourd'hui, il est incontournable.
J'ai donc fait une vidéo on l'on peut voir un mécanisme 5 bar effectuant différents mouvements dans les 3 dimensions.
Attention, il ne faut pas s'y tromper ! Le chemin cible décrit par les billes rouges utilise les instructions propres à VPython, mais c'est bien par le calcul que l'extrémité de la patte trouve la position et parcourt ce chemin. La concordance de la position des billes et de la patte validant les calculs.
Comme on peut le voir sur la vidéo, c'est l'extrémité de la diagonale du losange qui est le point de concordance entre la patte et les billes. Il me semble qu'il serait intéressant de faire un quadrupède avec des pattes télescopiques simulant cette diagonale. Les pattes de ce quadrupède seraient réduites à leur plus simple expression, mais seraient strictement équivalentes au mécanisme 5bar. A voir.
 et pour les malvoyants
et pour les malvoyants  , cela pourrait être utile.
, cela pourrait être utile.