 Posté par
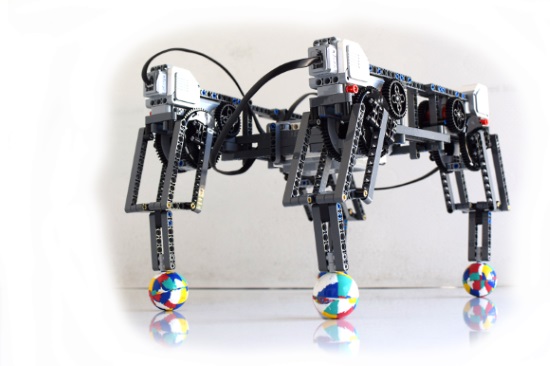
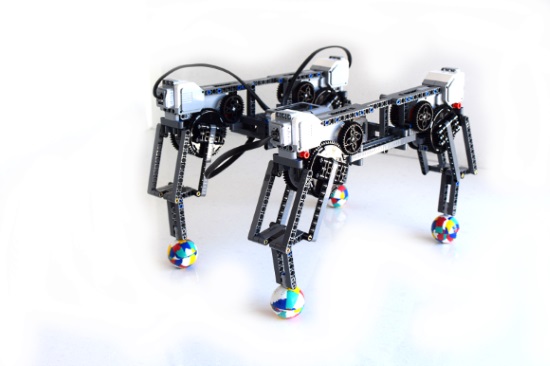
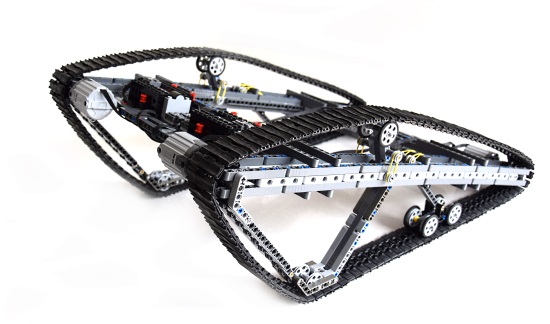
Posté par Voici donc, la première version de mon quadrupède.
J'ai voulu faire des dimensions raisonnables.
- poids 1,1kg
- hauteur 23cm
- longueur 34cm
- largeur 25cm
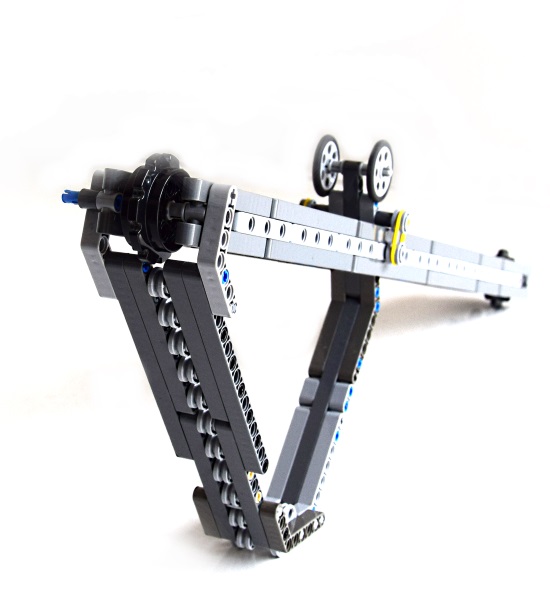
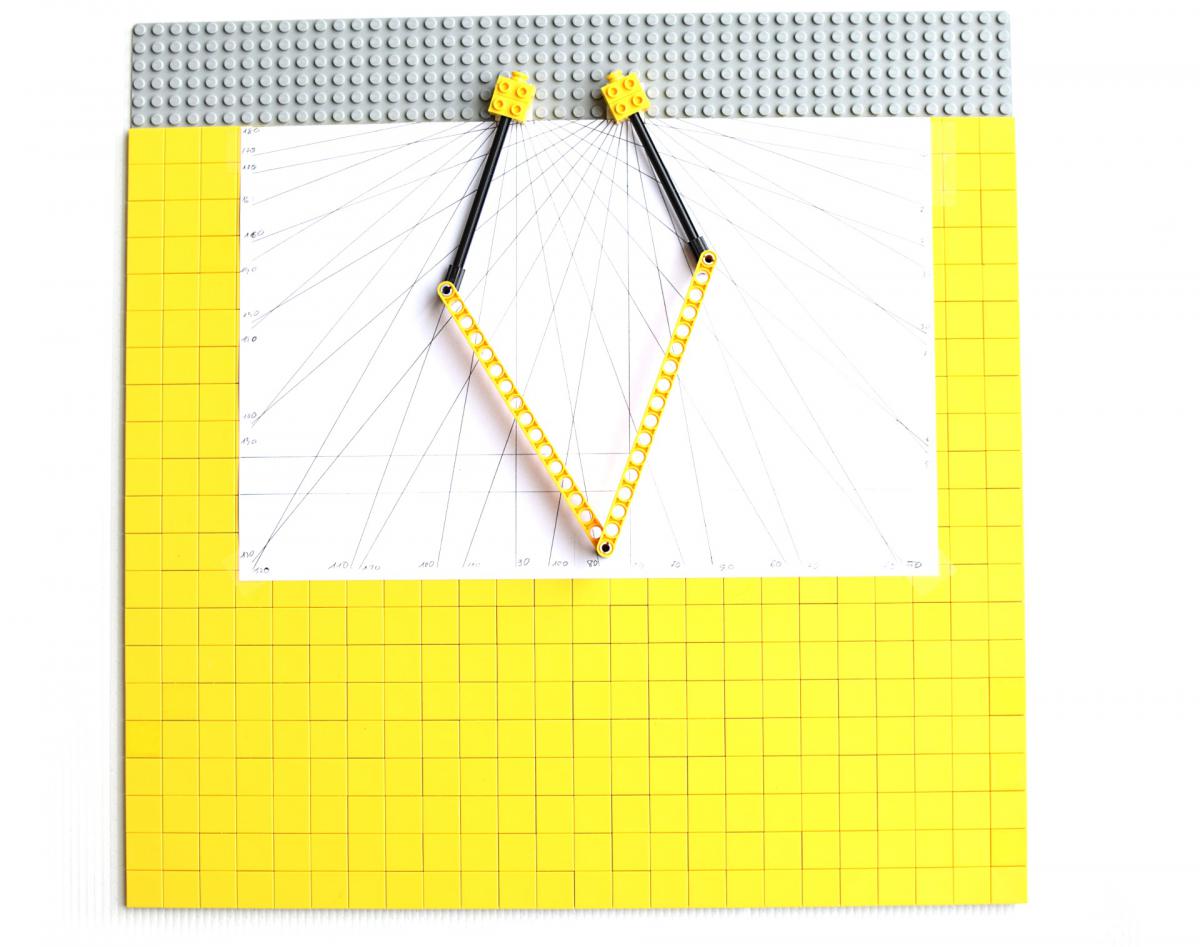
Les pattes utilisent le principe du parallélogramme et sont terminées par une balle très rebondissante.
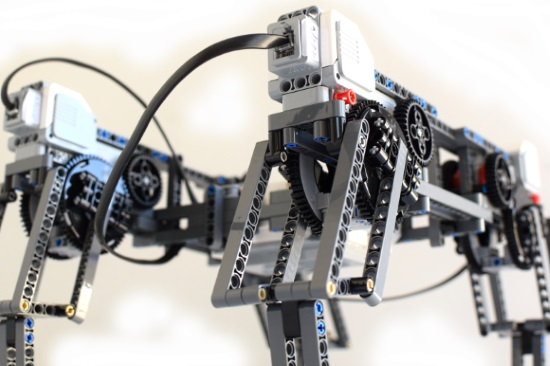
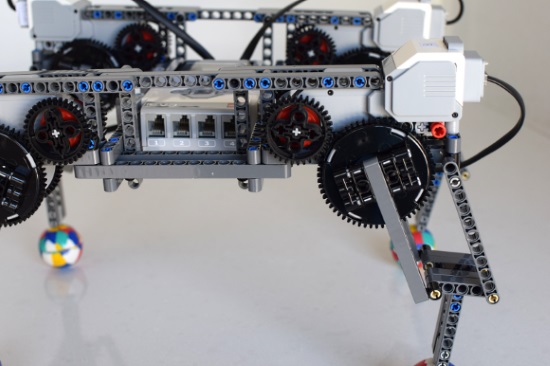
Les servos ont un axe traversant. Cela autorise un entrainement de part et d'autre de 2 Turn-Tables associées à chaque pattes. Ces Turn-Tables correspondent à un axe de 55mm de diamètre. Nettement moins de risques, donc, de fausser l'axe d'accroche de chaque patte.
Les servos sont couplés aux Turn-Table par une roue dentée. Ainsi pas de problème de poussée transversale sur leur axe.
Reste plus qu'à programmer tout ça. Je compte beaucoup sur l'avantage du langage EV3-G qui autorise très naturellment le multi-treading. Les programmeurs qui débutent avec l'EV3 n'ont aucune conscience de cet énorme avantage.
Voici quelques photos que j'ai faites avec mon nouveau 35mm. Bof
- Melmet, Mike118, thermo_nono et 25 autres aiment ceci



 Posté par
Posté par 

 Posté par
Posté par 
 Posté par
Posté par 

 Posté par
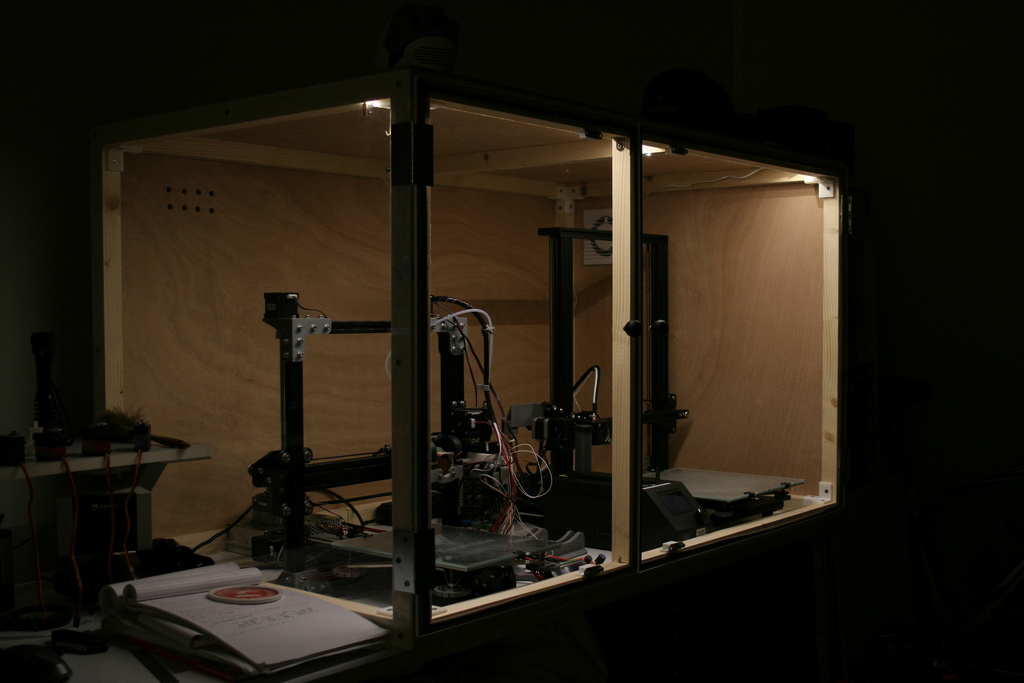
Posté par  , ce n'est qu'un filtre à air plastique qui est cassé, rien de bien méchant mais avec le débit du compresseur je ne veux pas tourner sans les filtres. Je pensais le recoller mais après avoir testé deux colle j'abandonne et mettre environs 30€ pour acheter un nouveau filtre me fait vraiment c...r donc j'ai pensé que je pourrais imprimer cette pièce sur mon imprimante mais comment faire le filetage pour qu'il se visse bien ensuite sur le compresseur ?
, ce n'est qu'un filtre à air plastique qui est cassé, rien de bien méchant mais avec le débit du compresseur je ne veux pas tourner sans les filtres. Je pensais le recoller mais après avoir testé deux colle j'abandonne et mettre environs 30€ pour acheter un nouveau filtre me fait vraiment c...r donc j'ai pensé que je pourrais imprimer cette pièce sur mon imprimante mais comment faire le filetage pour qu'il se visse bien ensuite sur le compresseur ?
 Posté par
Posté par 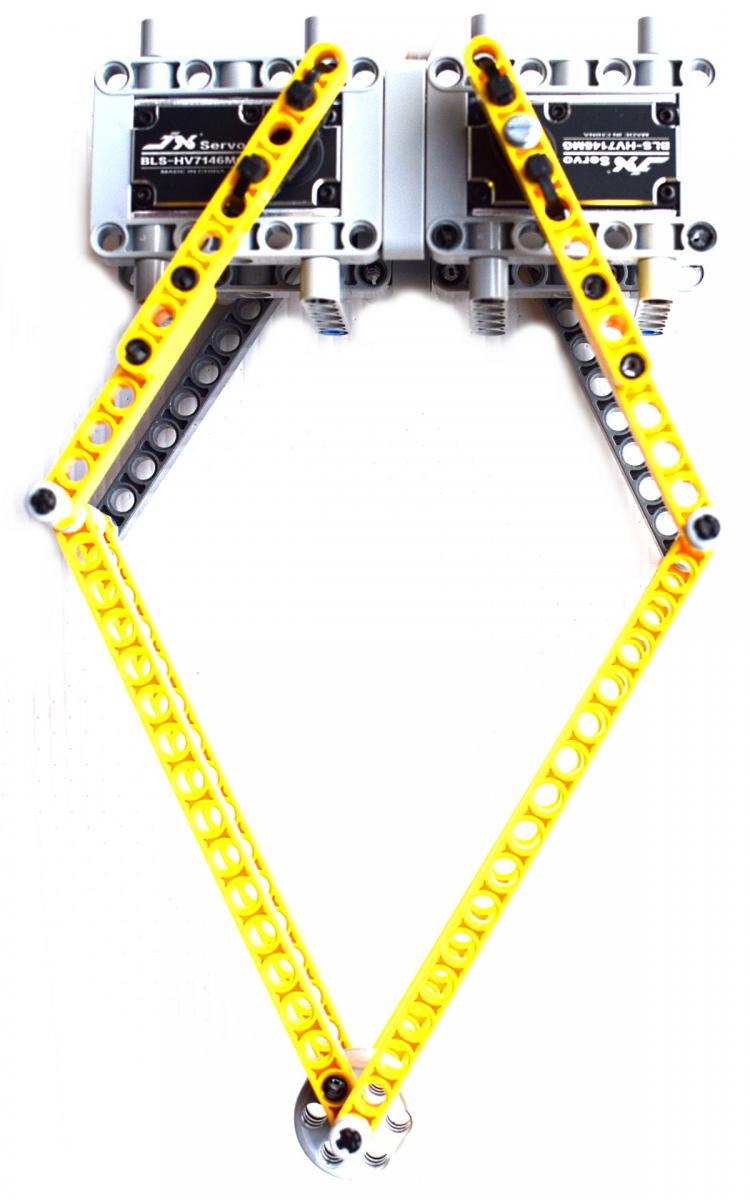


 Posté par
Posté par  Posté par
Posté par 
 Posté par
Posté par 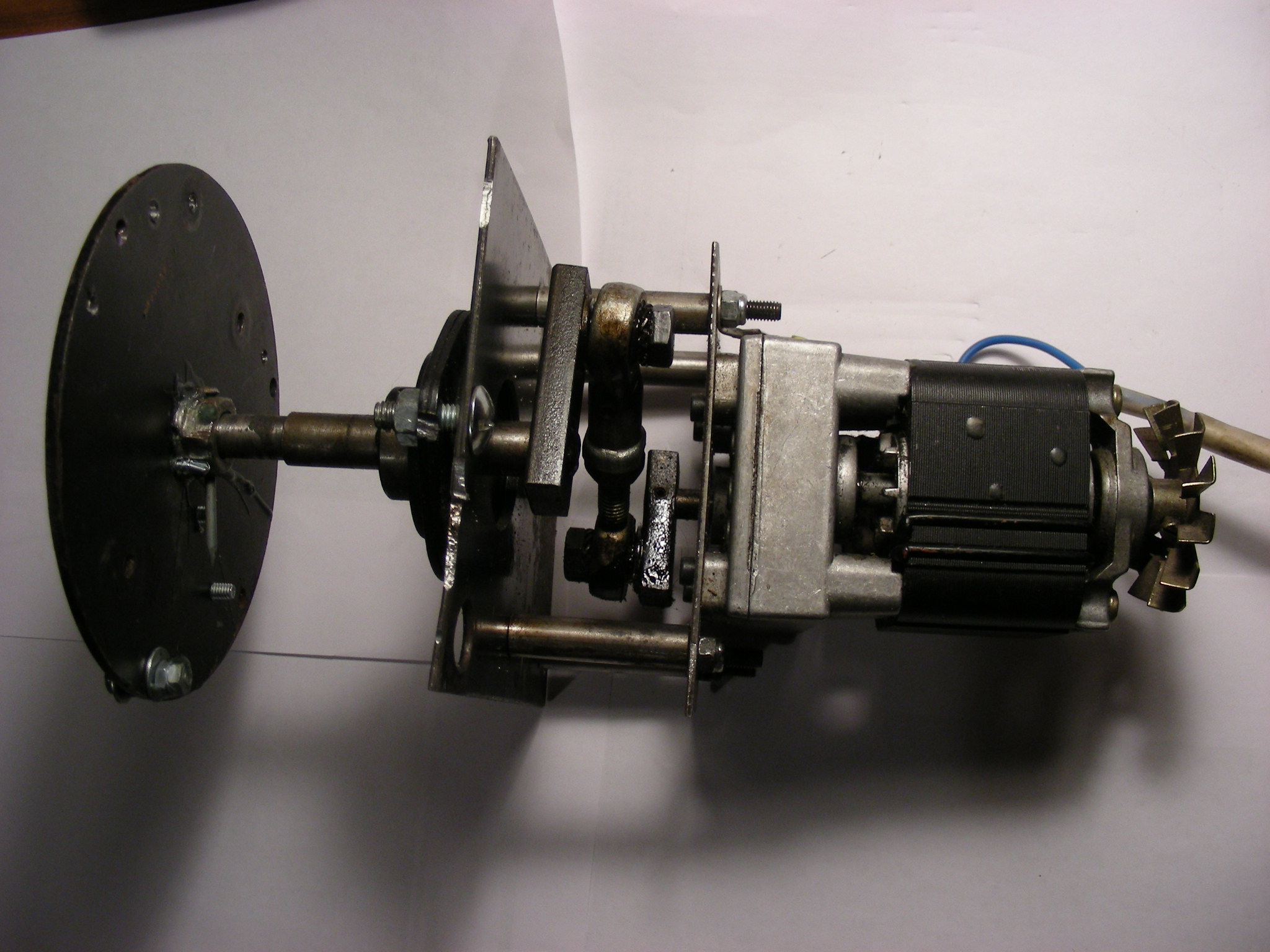
 Posté par
Posté par 

 Posté par
Posté par  Posté par
Posté par  Posté par
Posté par  Posté par
Posté par 

{kind=link}