
Pour le budget c'est le nerf de la guerre et de toute les guerres il ce fera petit à petit. J'ai commencé par des servomoteurs de moteur qui m'ont coûter les yeux de la tête pour zéro résultats donc la partie motricité est très importante et à ne pas prendre aux rabais.
Oui, c'est en lisant les différents topics que j'ai compris que pour avoir un résultat propre mieux valait y mettre le prix, quitte à revoir mes priorités 
Je me suis construit un bipede maison avec les moyens du bord puis je suis passer à un kit sur Aliexpress car plus de précisions et d'équilibrage donc à ne pas négliger les kit pour ce faire la main.
J'envisage justement de tenter mon projet sans préparation ni kit particulier, et acheter un kit si en cours de route je me retrouve dans une impasse. Mais avec le recul, cette solution te paraît-elle viable ?
Pour le poids si tu dépasse les 2kg sur ton robot c'est qu'il est assez gros donc bien calculé tes couples de servos pour avoir ce qu'il te convient pour pas dépenser inutilement.
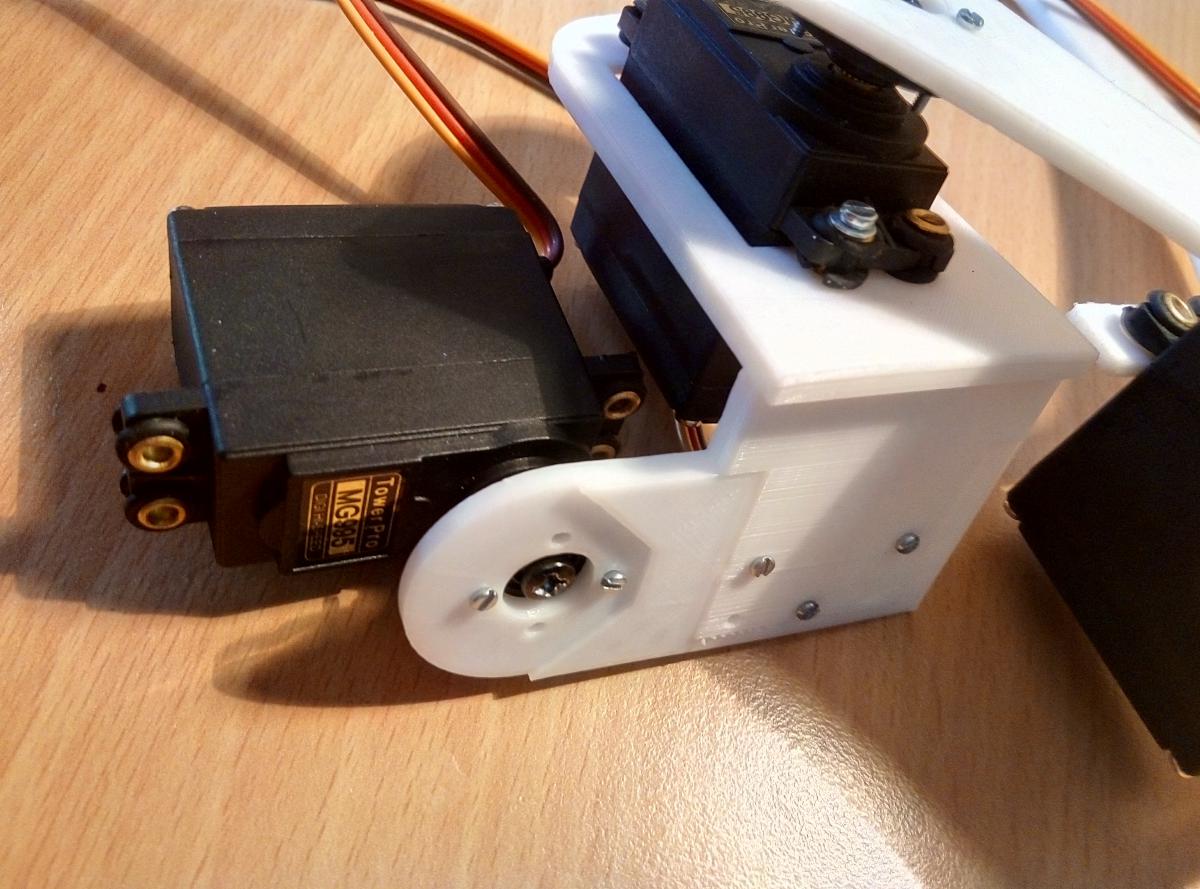
Je pense effectivement que les MG995 (couple : 11kg/cm) sont largement au dessus de mes besoins : un couple de 5 kg/cm me suffirait.
Mais en écumant les différents sites, je me suis rendue compte que je ne trouve aucun servo moins cher que les MG995 de robot maker (hormis les microservos qui risquent de lâcher assez rapidement). Et puis j'avoue que ça me plait d'avoir de la marge sur le poids, pour peut-être ajouter des modules, expérimenter et m'amuser sur le robot final.
Après où acheter hobbyking perso trop de retour négatifs même entrepots Europe car entrepôts Russie ou pays de l'est. Sinon Aliexpress pas de soucis, amazon.fr très bien pour certain truc niveau rapidité, gotronic.fr très très rapide (entreprise en France), un peu plus cher mais de très bonne qualité et livrer en 2 jours et sinon la boutique de robot-makers.
D'accord, c'est ce que je craignais... Je vais chercher du côté des sites français dans ce cas
Dernier conseil prend du plaisir à faire ton projet commence peut être plus petit pour voir tes difficultés niveau mécanique/budget/programmation . Mais surtout prendre du plaisir et c'est cela le plus important que tu mette 1 mois ou 10 ans le plaisir n'as pas de prix.
J'ai déjà réalisé un robot sur roues pour justement commencer par de petits projets, et j'avoue que je n'ai pas d'idées sur d'autres projets plus "faciles" à faire, ou du moins rien qui me passionne réellement... Pour l'instant, même si je n'ai encore rien acheté le plaisir est là, c'est réellement agréable de réfléchir à toutes les problématiques de mon projet et leurs solutions J'essaie de me fixer des objectifs pour fragmenter un peu tout ça, même faire bouger une patte serait déjà une victoire pour moi ! Je ne peux pas savoir si ma motivation sera toujours là dans deux mois, six mois voire un an, je sais que c'est un énorme projet pour une novice mais je rêve d'un hexapode depuis longtemps, et aujourd'hui j'ai envie de me lancer.



 et il faut quelques outils pour le travailler.
et il faut quelques outils pour le travailler.








 ), mais maintenant j'utilise Creo donc je peux fournir les plans sans soucis
), mais maintenant j'utilise Creo donc je peux fournir les plans sans soucis










