
 Mon contenu
Mon contenu Homme
Homme




 Posté par
Posté par How to tell them apart:
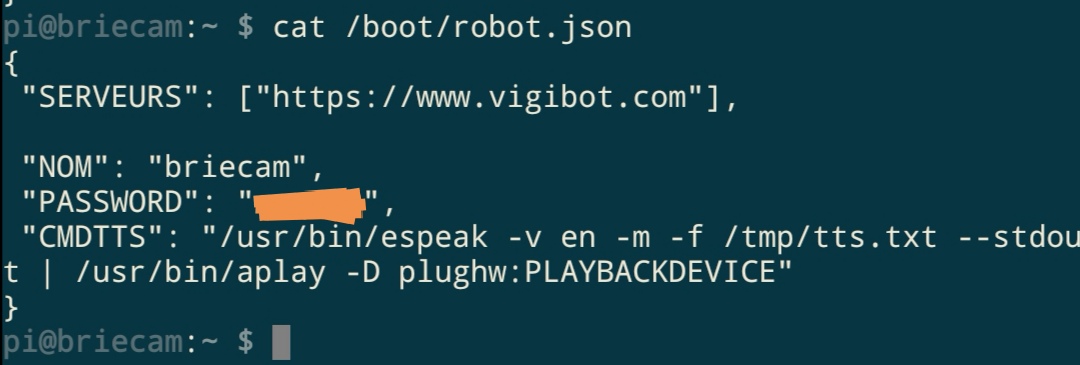
A. the hilink firmware is plug and play on raspbian. Once inserted, run `ifconfig` and you'll see a new `eth1` interface. Usually with an assigned IP of 192.168.8.100.
B. the stick firmware, once inserted, run `ifconfig` and you'll see a new `wwan0` interface, as well as these new devices: /dev/cdc-wdm0 , /dev/cdrom and probably /dev/sg0 , /dev/sg1 and /dev/sr0 .
How to set them up:
A. hilink firmware is plug and play
B. stick firmware needs setup. I found 2 methods that are supposed to work:
B.1. using mbimcli:
This does not work reliably. It fails silently from time to time.
sudo apt install libmbim-utils sudo mbimcli -d /dev/cdc-wdm0 --query-device-caps sudo mbim-network /dev/cdc-wdm0 start
Run
sudo nano /etc/mbim-network.conf
APN="internet" USERNAME="" PASSWORD="" IP="dhcp"
B.1.3.
sudo nano /etc/systemd/system/mbim-network.service
[Unit] Description=MBIM network connection After=network.target usb-devices.target Wants=network.target [Service] Type=simple ExecStart=/usr/bin/mbim-network /dev/cdc-wdm0 start ExecStop=/usr/bin/mbim-network /dev/cdc-wdm0 stop RemainAfterExit=yes [Install] WantedBy=multi-user.target
sudo systemctl daemon-reload sudo systemctl enable --now mbim-network.serviceB.2. using network-manager
sudo apt update sudo apt install modemmanager modem-manager-gui-help network-manager nmcli connection add type gsm ifname cdc-wdm0 con-name stick apn internet (gsm.pin ****) sudo nmcli connection modify stick connection.autoconnect yes nmcli connection up stickEntry apn `internet` might be different for your ISP.
- Mike118 aime ceci