

 Mon contenu
Mon contenu Homme
Homme




oui absolument c'est intéressant. je ne connaissais pas. Merci Oracid.
Je teste. Même si j'ai un peu de mal à quitter la solution moteur pas à pas qui a été très chronophage 
- Oracid aime ceci
 Posté par
- 09 janvier 2025 - 04:40
Posté par
- 09 janvier 2025 - 04:40
oui absolument c'est intéressant. je ne connaissais pas. Merci Oracid.
Je teste. Même si j'ai un peu de mal à quitter la solution moteur pas à pas qui a été très chronophage
Posté par
- 07 janvier 2025 - 10:16
Salut, J'avance aussi sur ce projet.
J'utilise une roue de guidage à l'arrière. Elle est commandée par un gros servo.
Les désavantages de cette solution :
- la rotation est limitée à 180°.
- les mouvements sont très rapides. Trop brutaux.
- le servo est assez bruyant. ...
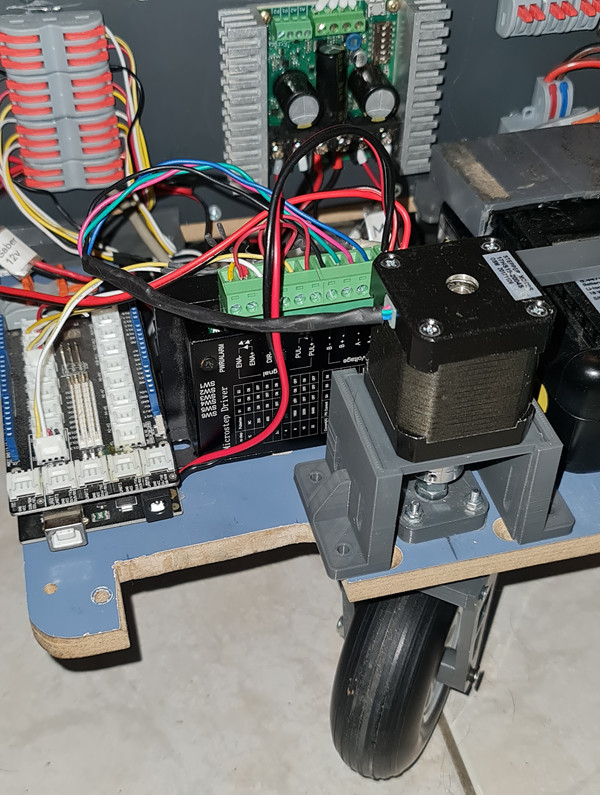
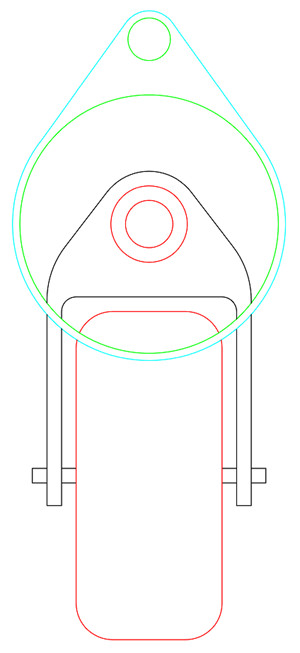
Je suis en train d'essayer de remplacer le servo par un moteur pas à pas monté dans l'axe de la roue.
J'ai utilisé un Arduino supplémentaire qui reçoit les commandes et gère le moteur pas à pas avec la bibliothèque Accelstepper.h.
Les mouvements sont ainsi beaucoup plus progressifs.
Le problème c'est qu'après avoir fait de nombreux mouvements gauche / droite, le moteur ne revient pas parfaitement dans l'axe.
Et lorsqu'il y a un effort plus important appliqué sur la roue, le moteur perd des pas...
Il est vrai que les moteurs pas à pas c'est tout nouveau pour moi donc je loupe sûrement quelque chose.
Ou je n'utilise pas le bon matos :
Moteur Nema17HS19 Couple de maintien: 59Ncm
Contrôleur DRI0043 réglé sur 3.5A
https://www.gotronic.fr/art-commande-moteur-pas-a-pas-dri0043-25551.htm
La première impression c'est que le moteur n'est pas suffisamment puissant. La rotation de la roue ne nécessite pas un effort important.
Apparemment il faut une remise à zéro régulière.... bref c'est bien plus compliqué qu'il n'y paraît.
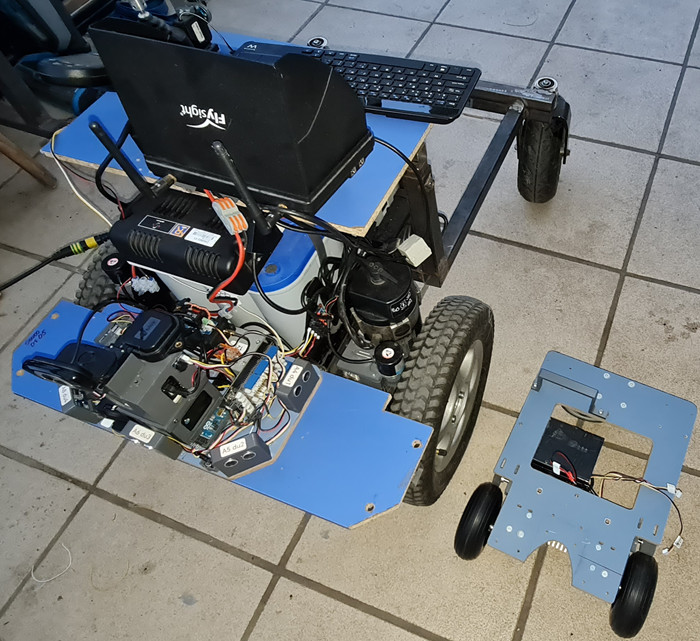
Voici ce que ça donne sur un robot miniature.
Posté par
- 22 décembre 2024 - 11:33
Salut,
Je suis en train de faire un projet un peu similaire. Mais je souhaiterais qu'il soit multifonctions.

J'ai utilisé les moteurs de siège pmr mais ils sont très lourds et volumineux. Avec leur centrale de commande et joystick. J'ai finalement acheté les mêmes moteurs que toi. (mais axe de 17mm et je ne trouve pas de moyeu qui va là-dessus)
Le guidage peut se faire par gps rtk, AruCo, encodeurs, magnétomètre. (Mini pc embarqué et camera Jevois)
J'ai beaucoup cherché au niveau du guidage car sur un terrain plat le guidage avec les 2 roues motrices et 2 roues folles à l'arrière fonctionne bien. Par contre sur un terrain accidenté c'est autre chose. J'ai finalement utilisé un roue directrice à l'arrière commandée par un gros servo.

Je vais tester ce que ça donne avec une charge de 100 kg de terre.
Mais il me semble que la solution idéale serait une roue motorisée et directrice comme mentionné plus haut.....
Posté par
- 04 septembre 2024 - 07:19
En tout cas je confirme que la solution avec une roue directrice (et non folle) est bien utile dans mon cas.
Les trajectoires sont bien plus nettes.
C'est plus compliqué car il faut trouver les bons réglages de la roue par rapport aux vitesses des roues motrices.
Posté par
- 04 septembre 2024 - 06:19
Bonjour,
Quelques nouvelles du GPS RTK Ardusimple :
Je l'ai utilisé dans une pelouse entourée d'arbres et de maisons et la précision est RTK FIXED c'est à dire centimétrique. Donc dans un champ bien dégagé cela ne devrait pas poser de problème.
Je l'utilise sur un micro pc Windows 10 via une connexion série.
Il faut utiliser le soft U-center qui s'occupe de la réception des données en série et de la connexion avec le serveur NTRIP qui fournit la correction de position. Il faut donc une connexion internet en permanence. (je suis en Belgique donc j'utilise le réseau Walcors qui est gratuit pour l'instant)
Etant donné que mon application de guidage du robot a aussi besoin de la trame gps, il faut que le port série soit dupliqué.
J'ai finalement opté pour GPSGATE de Franson. Pas trop cher et fonctionne correctement.
Le dernier point qui reste à résoudre est que la trame NMEA venant du gps n'envoie pas le cap du robot. Je suppose que c'est parce qu'il roule trop lentement.
Je calcule donc le cap en fonction de la dernière position d'il y a 3 secondes par rapport à la position actuelle.
Le support Ardusimple est très efficace.
En résumé en ce qui me concerne cette solution Ardusimple me convient parfaitement.
Posté par
- 14 juillet 2024 - 06:53
Posté par
- 14 juillet 2024 - 09:15
Après différents essais et notamment la traction d'une remorque je vais supprimer les 2 roues folles et placer une roue centrale.
La commande directionnelle de la roue sera assurée par 2 pignons à chaîne et un moteur.
Etant donné que ce moteur va devoir faire plusieurs tours pour que la roue pivote de 180° un servo 10 tours comme mentionné par Oracid devrait faire l'affaire.
Je vais utiliser des pignons / chaîne de vélo pour la transmission.
Posté par
- 13 juillet 2024 - 08:39
Super le "gros" servo. Je ne connaissais pas. En effet cela ouvre des possibilités.... c'est ce qu'il me faut. Commandé.
C'est sûr que le swerve drive mentionné par Mike118 est génial. Mais cela me paraît trop compliqué pour moi à moins de trouver une grande roue de brouette motorisée directrice toute faite. Ce serait du bonheur.
A la limite une seule roue motrice serait même suffisante. Et 2 roues fixes à l'arrière.
En fait je souhaiterais conserver la mobilité des roues folles pour faire des virages sur place mais d'un autre côté stabiliser la trajectoire sur les lignes droites.


Je vais commencer par faire une maquette du système de direction.
Posté par
- 12 juillet 2024 - 07:26
Bonjour
Je réalise un robot destiné à réalisé différents travaux extérieurs.
Poids +/- 150 kg à vide.
2 roues motorisées et 2 roues folles.
Modes de guidage : télécommande, camera AI et AruCo, Gps RTK
Equipement : micro pc, camera AI, Gps RTk, Arduino Mega
Comme pour la majorité des robots, le guidage se fait en faisant varier la vitesse de chaque roue.
Sur du terrain plat pas de problème, cela fonctionne bien.
Par contre sur un terrain accidenté, quand une roue rencontre un obstacle le robot part de travers car les roues arrière sont folles.
D'autant plus quand il est chargé de 60kg de terre.
La gestion de la vitesse de chaque roue n'est probablement pas optimale mais il me semble que si les 2 roues arrière étaient directrices (comme sur une voiture) la trajectoire serait plus facile à maintenir.
Cela nécessite l'utilisation d'un moteur supplémentaire qui va actionner la crémaillère. Moteur CC ? Moteur pas à pas ?
Avez-vous déjà utilisé ce système sur un robot ?
Merci pour vos commentaires.

Posté par
- 13 février 2024 - 09:48
Bonjour Oracid
Moi je suis d'accord avec Madame. Je trouve que c'est très bien. Très clair. Très didactique.
Merci beaucoup et continue stp.
Posté par
- 08 février 2024 - 03:13
Thank you Tnera for your reply.
I'm still searching and asking questions to the technical support wich is unreachable...
So I'm quite sure it is MODBUS RTU. So it is a serial communication. That's why I can not find any ip adress.
But I do not have any com port created.
From my point of view I need a converter or a software tool to emulate a serial port....
I will try ChatGPT
Thank you
Posté par
- 07 février 2024 - 08:33
Bonjour, je dois réaliser une appli qui récupère les données d’un automate EVCO C-Pro3 via le protocole Modbus RTU. La doc est assez laconique : elle précise les caractéristiques de la communication série. Je me connecte au port BMS connectivity de l'automate via un câble réseau. Je ne connais pas l’adresse IP de l’automate et il n’y a pas de port COM virtuel qui est créé. Lorsque j’installe un serveur DHCP l’automate ne reçoit pas d’adresse IP. Il s’agit donc probablement d’une adresse IP statique. Si je lance un scan des adresses IP aucun résultat.
Quelqu’un a déjà travaillé avec du Modbus RTU ?
Merci
Posté par
- 28 octobre 2023 - 09:03
Bonjour,
Le RPlidar cité plus haut fonctionne toujours correctement.
J'aurais souhaité un appareil plus petit et qui peut être utilisé via un port série d'un pc Windows. (Au départ du projet je n'avais qu'un Arduino Mega, maintenant il y a un mini pc Win10)
J'ai acheté ceci :
https://www.amazon.f...00?ie=UTF8&th=1
Il est vendu avec un convertisseur série.
Le soft LdsPointCloudViewer-v3.0.6 permet de tester le fonctionnement sous Windows. Et cela fonctionne.
Cependant s'il est connecté directement au pc et lecture du port série avec Putty : on voit que des données transitent mais c'est illisible.
Test avec différentes vitesses, pareil.
Dans la fiche technique : Communication interface UART@230400 ce qui me semble être tout à fait particulier.
Mais même si on met cette vitesse dans Putty on ne reçoit rien d'exploitable.
J'ai envoyé une requête au support mais sans réponse.
Quelqu'un a une idée de comment utiliser cet engin sur un pc ?
Ou la référence d'un autre appareil qui donne satisfaction ?
Merci
Posté par
- 17 octobre 2023 - 07:37
Bonjour Sandro,
Ok pour le voltmètre effectivement il n'affiche pas les potentielles micro chutes de tension.
Il faudrait effectivement que j'apprenne à me servir d'un oscilloscope.
Merci pour le partage d'expérience : c'est exactement le même phénomène que je remarque. Quand le robot consomme peu, peu de soucis. Mais quand il faut un virage sur place, les servos deviennent fous.
Mais en tenant compte de tes propositions cela devrait fonctionner.
Merci pour ton aide
Posté par
- 07 octobre 2023 - 05:59
Bonjour
J'ai poursuivi et le Sabertooth fonctionne très bien. L'étape suivante sera de l'essayer avec des plus gros moteurs.
Communication en série avec un Arduino Mega.


