
 Mon contenu
Mon contenu Homme
Homme






Ce gars là, il sait de quoi il parle.
Quand on voit ses réalisations, surtout ses plantages, et l'expérience accumulée, on devrait essayé de mieux comprendre ses choix mécaniques, cela nous ferait certainement gagner du temps et de l'argent.
Bien entendu, certaines choses ont évolué, par exemple à 18'16" on peut voir des servos de 15kg.cm alors qu'aujourd'hui on en trouve pour pas trop cher à 50kg.cm ce qui pourrait modifier nos choix.
Et en plus, il joue de la guitare. Il doit vivre dans un espace temps où les jours durent 48h.
Ou alors, il n'a ni famille, ni femme. Certes, cela fait gagner du temps, mais alors, à quoi bon tout cela...
#100109 James Bruton - Humanoïde
 Posté par
- 14 novembre 2018 - 07:45
Posté par
- 14 novembre 2018 - 07:45
#100076 EV3 - Utilisation des servos RC
Posté par
- 12 novembre 2018 - 03:05
Dans cette vidéo, je montre que l'on peut utiliser des servos RC avec l'EV3 aussi facilement qu'avec un Arduino, grace au NXTServo-v3 de Mindsensors.
http://www.mindsensors.com/ev3-and-nxt/25-8-channel-servo-controller-for-nxt-or-ev3
http://www.mindsensors.com/ev3-and-nxt/25-8-channel-servo-controller-for-nxt-or-ev3
#100075 Gato, mon petit quadrupède
Posté par
- 12 novembre 2018 - 02:26

#100068 Discussions techniques sur les servos
Posté par
- 12 novembre 2018 - 12:36
Comme je l'avais promis à Oliver, voici une vidéo ou je teste le bruit que fait le servo JX BLS-HV7146MG (c'est le servo dont Oliver a fait l'acquisition, il y a quelques temps) en comparant une séquence de mouvements avec l'EV3 puis avec l'Arduino.
Pas de bruit, aussi bien avec l'EV3 qu'avec l'Arduino. Du coup, je me demande si je dois mettre cette vidéo en Public.
Pour entendre une légère vibration du servo, il faut vraiment coller l'oreille dessus.
Vous pouvez mettre le son à fond, vous n'entendrez rien à part un bruit de fond.
La charge est de 100g à 10cm de l'axe du servo, soit 1kg à 1cm. J'ai pensé que cela était suffisant pour mettre ce problème en évidence.
Pas de bruit, aussi bien avec l'EV3 qu'avec l'Arduino. Du coup, je me demande si je dois mettre cette vidéo en Public.
Pour entendre une légère vibration du servo, il faut vraiment coller l'oreille dessus.
Vous pouvez mettre le son à fond, vous n'entendrez rien à part un bruit de fond.
La charge est de 100g à 10cm de l'axe du servo, soit 1kg à 1cm. J'ai pensé que cela était suffisant pour mettre ce problème en évidence.
- Forthman aime ceci
#100033 Gato, mon petit quadrupède
Posté par
- 11 novembre 2018 - 02:46
Je ne pense qu'à ça ! Je suis sur le coup.Tu pourras me dira si il fait du bruit lorsqu'il tient sa position, stp
Merci.

J'ai déjà fait un test avec mon EV3, zéro bruit, mais sans charge. Faudrait que je mette une charge de 1kg.
Il faudrait que je fasse le même test avec l'EV3 et un Arduino.
Avec une petite vidéo, bien sur !
#100021 Gato, mon petit quadrupède
Posté par
- 11 novembre 2018 - 11:26
J'ai commencé à traiter le problème de l'adaptation des servos RC aux Lego. Les servos Lego manquant de puissance pour cette réalisation.
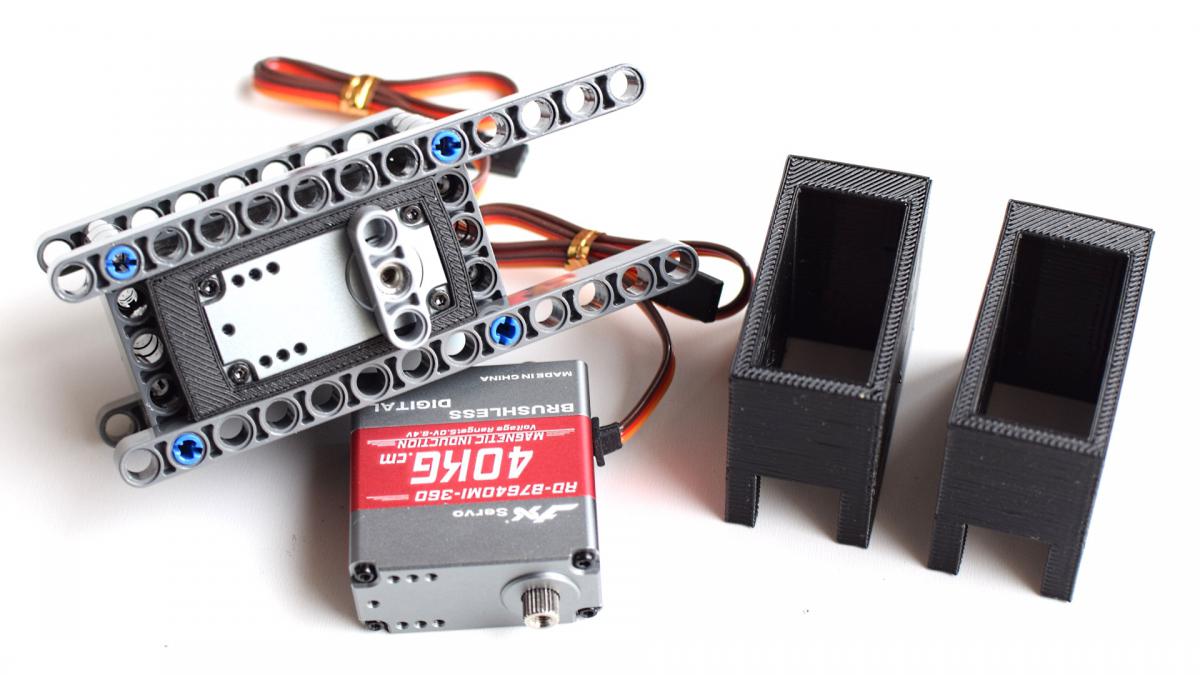
Voici donc mon premier essai avec le servo JX RD-B7640HV-360 ayant un couple de 40kg.cm, https://www.robot-ma...0-de-jx-40kgcm/, ici c'est la version 360° à rotation continue.
Pour l'adaptation aux alignements Lego, j'ai eu l'idée de faire une "chaussette" en NinjaFlex.
Cette "chaussette" ne possède pas de trous d'adaptation pour ne pas me contraindre à un montage spécifique. L'idée, c'est d'utiliser l'élasticité du NinjaFlex pour bloquer le servo. Pour augmenter encore le blocage, j'ai surdimensionnées les cotes internes et externes de 0,5mm.
Sur la photo, on voit un exemple de montage et on peut constater que le servo ne risque pas de bouger. Dans le pire des cas, je pourrai toujours bloquer le servo avec des pièces Lego. Je ne suis pas inquiet.
Notez l'alignement du palonnier avec les trous Lego. Pour mémoire, le pas Lego est de 8mm.
Le servo mesure 20x40x40 ce n'est qui pas trop mal, malheureusement l'axe est centré à 10mm, ce qui est normal, mais crée le plus gros problème.
Il faut bien comprendre que les problèmes d'alignements doivent se résoudre dans les 3 dimensions X, Y et Z
Cliquez moi.
Voici donc mon premier essai avec le servo JX RD-B7640HV-360 ayant un couple de 40kg.cm, https://www.robot-ma...0-de-jx-40kgcm/, ici c'est la version 360° à rotation continue.
Pour l'adaptation aux alignements Lego, j'ai eu l'idée de faire une "chaussette" en NinjaFlex.
Cette "chaussette" ne possède pas de trous d'adaptation pour ne pas me contraindre à un montage spécifique. L'idée, c'est d'utiliser l'élasticité du NinjaFlex pour bloquer le servo. Pour augmenter encore le blocage, j'ai surdimensionnées les cotes internes et externes de 0,5mm.
Sur la photo, on voit un exemple de montage et on peut constater que le servo ne risque pas de bouger. Dans le pire des cas, je pourrai toujours bloquer le servo avec des pièces Lego. Je ne suis pas inquiet.
Notez l'alignement du palonnier avec les trous Lego. Pour mémoire, le pas Lego est de 8mm.
Le servo mesure 20x40x40 ce n'est qui pas trop mal, malheureusement l'axe est centré à 10mm, ce qui est normal, mais crée le plus gros problème.
Il faut bien comprendre que les problèmes d'alignements doivent se résoudre dans les 3 dimensions X, Y et Z
Cliquez moi.
#99835 Création d'un quadrupède
Posté par
- 05 novembre 2018 - 08:14
Regarde bien, dans les vidéos les servos sont insérés dans un étrier (un U) qui le maintient de part et d'autre.c'est exactement le même système que moi non ? Et je suis obligée d'intégrer l'axe à la structure pour que mes pattes bougent..
Dans ta structure dès qu'une patte va prendre appui sur le sol, elle va forcer transversalement sur l'axe du servo.
C'est comme si sur ton vélo, la roue n'était tenue que par un seul coté et qu'il n'y avait pas de fourche.
Sur le type araignée, l'assise des pattes est très large, alors que par exemple pour un chat, les pattes sont très serrés de part et d'autre du corps.
Et donc le périmètre triangulaire de 3 pattes est très étroit.
- Manon5 aime ceci
#99817 Création d'un quadrupède
Posté par
- 05 novembre 2018 - 07:55
Mauvaise idée, à mon avis, l'avantage de l'hexapode c'est que justement il garde l'équilibre lorsque l'on soulève une, deux ou trois pattes, alors que le quadrupède est en déséquilibre permanent sinon, il n'avance pas. Quand au bipède…
Ce que j'ai dit là est inexacte, je tenais à corriger.
Ce qui est vrai pour un quadrupède de type mammifère ne l'est pas pour un type araignée qui maintient son centre de gravité même avec 3 pattes.
On peut aisément voir cet avantage au début de la vidéo.
En conséquence, oui il serait intéressant de partir sur un quadrupède plutôt qu'un hexapode. D'autant que ce serait beaucoup plus léger, moins gourmand en énergie, moins compliqué à programmer et moins cher. Bref, que des avantages.
Par ailleurs, en faisant quelques petites recherches sur YouTube, j'ai constaté que l'on proposait beaucoup plus de quadrupèdes que d'hexapodes. qui sont assez rares.
#99752 Gato, mon petit quadrupède
Posté par
- 03 novembre 2018 - 12:08
Voici une nouvelle vidéo avec un mouvement identique au précédent mais adapté aux contraintes Lego.
Il fallut faire des légers compromis quand à la planéité du mouvement au sol, mais le résultat me parait néanmoins assez satisfaisant.
Je vais donc passer aux tests en réel.
Il fallut faire des légers compromis quand à la planéité du mouvement au sol, mais le résultat me parait néanmoins assez satisfaisant.
Je vais donc passer aux tests en réel.
#99714 Au bistrot du coin ...
Posté par
- 02 novembre 2018 - 07:00
#99693 Création d'un quadrupède
Posté par
- 01 novembre 2018 - 07:25
Mauvaise idée, à mon avis, l'avantage de l'hexapode c'est que justement il garde l'équilibre lorsque l'on soulève une, deux ou trois pattes, alors que le quadrupède est en déséquilibre permanent sinon, il n'avance pas. Quand au bipède…Ah aussi, pour économiser sur les servos je voulais commencer avec seulement 4 pattes, et monter à 6 si je ne m'en sors pas... Bonne ou mauvaise idée à votre avis ?
#99692 pybullet + Bullet Physics SDK - Deep learning, cinématique inverse etc.
Posté par
- 01 novembre 2018 - 07:15
Même si je n'en comprends pas les avantages, j'ai l'intuition que ce logiciel(Open Source) est d'une grande importance.
Faite une recherche sur YouTube, vous ne serez pas déçu.
Si vous en avez la compétence, merci par avance de nous en dire plus.
Voici quelques liens et une vidéo pour illustrer l'intérêt du logiciel.
https://pypi.org/project/pybullet/
https://pybullet.org/wordpress/
https://github.com/b...physics/bullet3
Faite une recherche sur YouTube, vous ne serez pas déçu.
Si vous en avez la compétence, merci par avance de nous en dire plus.
Voici quelques liens et une vidéo pour illustrer l'intérêt du logiciel.
https://pypi.org/project/pybullet/
https://pybullet.org/wordpress/
https://github.com/b...physics/bullet3
#99658 Au bistrot du coin ...
Posté par
- 30 octobre 2018 - 09:30




