Il y a suite https://www.ffmpeg.org/couplé avec raspivid.
Ça te permet de gérer facilement le flux comme tu veux qualité ou fluidité. Et la charge CPU que tu veux.
Je te livre les quelques tests que j'ai fait il y quelque temps. Le principe, raspivid capture la cam de la pi et envoie le flux sur ffserver. ffserver diffuse le flux depuis la pi, n'importe où sur ton réseau wifi. Par exemple dans une page web avec le tag video.
Le fichier ffserver.conf, par exemple :
HTTPPort 8090
HTTPBindAddress 0.0.0.0
CustomLog -
<Feed feed1.ffm>
ACL allow 127.0.0.1
</Feed>
# if you want to use mpegts format instead of flv
# then change "live.flv" to "live.ts"
# and also change "Format flv" to "Format mpegts"
<Stream live.flv>
Format flv
Feed feed1.ffm
VideoCodec libx264
VideoFrameRate 30
VideoBitRate 512
VideoSize 320x240
#AVOptionVideo crf 23
#AVOptionVideo preset medium
# for more info on crf/preset options, type: x264 --help
#AVOptionVideo flags +global_header
NoAudio
#AudioCodec aac
#Strict -2
#AudioBitRate 128
#AudioChannels 2
#AudioSampleRate 44100
#AVOptionAudio flags +global_header
</Stream>
Tu lances ffserver comme ça :
ffserver -f ffserver.conf
Pour raspivid, par exemple :
raspivid -n -vf -hf -t 0 -w 320 -h 240 -fps 30 -b 512000 -pf main -ih -g 5 -vs -o - | ffmpeg -i - -vcodec copy -an http://localhost:8090/feed1.ffm
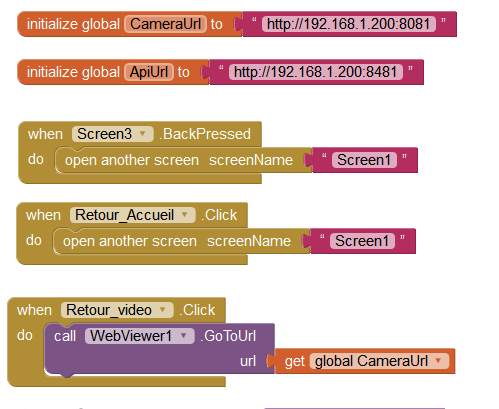
Pour afficher le flux :
<video src="<IP de ta PI>" autoplay preload="none">
</video>
Source : http://www.jeffreythompson.org/blog/2014/11/13/installing-ffmpeg-for-raspberry-pi/
Après, si c'est pour avoir du 320x240 pour ton CPU, tu peux certainement le faire directement avec motion.
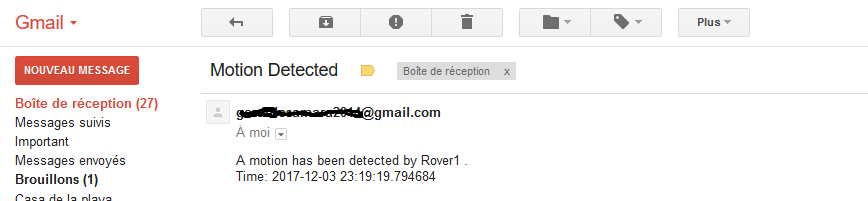
Aussi, motion intègre de la détection simple de mouvements. c'est certainement un truc lourd pour le CPU, c'est peut-être désactivable. Mais ce doit être intéressant pour un robot de surveillance.  C'est peut-être pas si mal motion ^^
C'est peut-être pas si mal motion ^^
Modifié par Path, 29 novembre 2017 - 09:10 .
Ajout de notes perso





 .
.















![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)








