J'en utilise 4 pour mon robot-patrouilleur . C'est un grand classique ..
Tu as trouvé où la donnée concernant l'angle de vision ?
En regardant ton dessin et par rapport à ce que j'ai expérimenté , je pense que ca détecte sur une bande plus large ..
Contenu de N1oN4o
Il y a 43 élément(s) pour N1oN4o (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#103308 Glenn Robot Humanoide
 Posté par
sur 03 mai 2019 - 12:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 03 mai 2019 - 12:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#72744 Glenn Robot Humanoide
Posté par
sur 04 août 2016 - 08:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je sais pas s'il y a une "meilleure" façon de faire mais personnelement je ferai la liste des "évenements" possibles avec à chaque fois les actions spécifiques à chaque évenement .
Le plus compliqué, pour moi, c'est de gérer les cas délicats , exemple : 2 évenements "simultanés" avec chacun une action contraire genre avance/recule ou bien qu'est ce qui se passe si ton robot perçoit un bruit à gauche et un autre à droite en même temps ...Faut donner des priorités, j'imagine mais il faut les trouver !
!
Le plus compliqué, pour moi, c'est de gérer les cas délicats , exemple : 2 évenements "simultanés" avec chacun une action contraire genre avance/recule ou bien qu'est ce qui se passe si ton robot perçoit un bruit à gauche et un autre à droite en même temps ...Faut donner des priorités, j'imagine mais il faut les trouver
!
#103123 [Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Posté par
sur 20 avril 2019 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il en est où ce projet ?
#73359 Capteur de distance Laser VL53L0X
Posté par
sur 03 septembre 2016 - 06:50
dans
Electronique
Qu'est ce que tu veux dire par "capteur ponctuel" ?
Il a l'air intéressant ...
#72827 Robot Quadrupède intelligent.
Posté par
sur 08 août 2016 - 08:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Super projet !
#103516 Des conseils pour les débutant qui souhaitent apprendre à faire des robots
Posté par
sur 15 mai 2019 - 06:52
dans
Conseils et aide aux débutants, livres et kits en robotique
Si j'avais un conseil à "donner" , ça serait le suivant : un projet doit correspondre à un besoin (important ou non) .
Ne faites pas à un robot (ou tout autre sorte de projet) s'il n'y a pas de réels intérêts derrière.
Faire un bon cahier des charges/objectifs permet également une meilleur organisation du projet ..
#103201 Bras Robot dessin
Posté par
sur 25 avril 2019 - 09:35
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Super interessant ton projet !
#103300 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 02 mai 2019 - 10:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ca fait une grande pièce à imprimer ,bon.courage. De l'expérience que j'ai avec le PLA c'est que ca se déforme facilement avec la chaleur : ne laisse pas ton robot dans une véranda ou une voiture en plein soleil ..
#103307 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 03 mai 2019 - 12:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Faut pas que ca plante en cours de print 😅!
#72723 Robot Suiveur de Ligne -> Toulouse Robot Race !
Posté par
sur 03 août 2016 - 09:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Sympa ton projet ! Je pense partir sur une base de voiture télécommandée pour mon futur robot , ça simplifie la partie "méca" !!
Je pense que l'idée est là . Personnellement j'ajouterais des "facteurs d'importance" spécifiques à chaque capteur dans l'équation globale . Le but étant de donner plus de poids aux capteurs centraux car s'ils rencontrent un obstacle , le mouvement d'évitement devra être plus rapide et plus important que pour un obstacle détecté sur un des côtés de ta voiture !
!
Merci Mike pour ton retour, alors je vais essayer de répondre point par point :
....
Si je comprend bien ,il fraudra que par exemple mes capteurs qui sont à droite prenne une valeur négative et à droite une valeur positive.
La somme de mes valeurs m'indique la tendance de la courbe , c'est bien cela?
....
.
Je pense que l'idée est là . Personnellement j'ajouterais des "facteurs d'importance" spécifiques à chaque capteur dans l'équation globale . Le but étant de donner plus de poids aux capteurs centraux car s'ils rencontrent un obstacle , le mouvement d'évitement devra être plus rapide et plus important que pour un obstacle détecté sur un des côtés de ta voiture
!
#72745 Robot Suiveur de Ligne -> Toulouse Robot Race !
Posté par
sur 04 août 2016 - 08:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour pondérer tes capteurs , tu peux ajouter un truc du style
int facteurSensor[5] ;
facteurSensor[0] = 10 ;
facteurSensor[1] = 10 ;
facteurSensor[2] = 10 ;
facteurSensor[3] = 10 ;
facteurSensor[4] = 10 ;
Les valeurs sont à définir expérimentalement
Tu ajoute ça dans le code de mike118 ici dans computeInput() :
!
int facteurSensor[5] ;
facteurSensor[0] = 10 ;
facteurSensor[1] = 10 ;
facteurSensor[2] = 10 ;
facteurSensor[3] = 10 ;
facteurSensor[4] = 10 ;
Les valeurs sont à définir expérimentalement
Tu ajoute ça dans le code de mike118 ici dans computeInput() :
result = result +(i-2)*stateSensor[i]*facteurSensor[i];Et normalement ça devrait marcher
!
#72760 Robot Suiveur de Ligne -> Toulouse Robot Race !
Posté par
sur 04 août 2016 - 08:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc si ton "result" est négatif , la ligne noire est à gauche , si c'est égal à zéro , elle est au milieu , si c'est positif elle est à droite !
(Sous réserve que ton Sensor[0] soit à l'extrême gauche , le Sensor[1] est à gauche , le Sensor[2] est au milieu , le Sensor[3] à droite , et pour finir le Sensor[4] tout à droite )
Bon courage pour la suite !
#72796 Robot Suiveur de Ligne -> Toulouse Robot Race !
Posté par
sur 06 août 2016 - 08:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ya 2 fois un "void readState();" qui sert à dêclarer ta fonction donc c'est pas bon .
Elle n'est pas décrite avec un "void readState() { blablablabla } " .
Pour l'appeler un simple " readState(); " suffit !
Du coup , il y a un soucis aussi avec computeInput
Ya une confusion à la fin avec ReadState et computeInput
Et aussi des déclarations qui ne sont pas à leur place il me semble .
Elle n'est pas décrite avec un "void readState() { blablablabla } " .
Pour l'appeler un simple " readState(); " suffit
!Du coup , il y a un soucis aussi avec computeInput
Ya une confusion à la fin avec ReadState et computeInput
Et aussi des déclarations qui ne sont pas à leur place il me semble .
#72818 Robot Suiveur de Ligne -> Toulouse Robot Race !
Posté par
sur 07 août 2016 - 07:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voila ce que je ferais , si j'ai bien compris ton besoin ..
#define SEUILMINNOIR 270
#define SEUILMAXBLANC 70
uint8_t stateSensor[5];
int value;
void setup()
{
}
/****************Fonction readState**********************/////
void readState() {
for (uint8_t i=1; i<6; i++) // i de 1 à 5 pour les capteurs de 1 à 5 capteur 1 mis sur A1 capteur 5 sur A5
{
value = analogRead(i);
if ( value> SEUILMINNOIR ) // dans ce cas on est sur du noir
{
stateSensor[i-1]=1; // i-1 car on commence un tableau à l'index 0 ... et ici i entre 1 et 5
}
else if ( value<SEUILMAXBLANC ) // dans ce cas on est sur du blanc
{
stateSensor[i-1]=0; // à voir si il faut échanger 0 et 1 entre les deux lignes stateSensor en fonction de si on cherche du blanc ou du noir
}
else
{
// Do nothing : on est entre 70 et 270 on ne sait pas sur quel couleur on est on garde l'état précédent
}
}
}
/****************Fonction computeInput**********************/////
int8_t computeInput() {
int8_t result=0;
readState(); // appel de la fonction readState
for (int8_t i=0; i <5; i++ )
{
result = result +(i-2)*stateSensor[i];
}
return result;
}
// focntion principale
void loop() {
int8_t essai = 0;
essai = computeInput();
}
#103230 Créer un signal carré 30Khz arduino
Posté par
sur 27 avril 2019 - 05:58
dans
Electronique
Les temps de montée/descente d'une sortie digitale sont de quel ordre ?
Ca peut jouer un peu sur la forme et la fréquence de ton signal j'imagine .
#103515 [Project] M.A.R.C.E.L
Posté par
sur 15 mai 2019 - 06:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Et concrètement il va servir à quoi Marcel ? une sorte de "Google home"-like ?
#104158 MOORE (Mobile-Open-Omnidirectional-Robot-Experience)
Posté par
sur 26 juin 2019 - 08:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ton châssis est en PLA ?
Les roues sont excellentes 😊.
Les roues sont excellentes 😊.
#104270 MOORE (Mobile-Open-Omnidirectional-Robot-Experience)
Posté par
sur 04 juillet 2019 - 01:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Attention à la chaleur avec le PLA ..
#103422 Nouvelle gamme cartes Arduino MKR ... Exemple MKR1000
Posté par
sur 10 mai 2019 - 08:39
dans
Demandes d'informations sur les produits de la boutique
Vu les prix, les clones chinois de la gamme actuelle ont encore une longue vie devant eux
#103335 Les projets Robot Makers
Posté par
sur 06 mai 2019 - 04:43
dans
Projets collaboratifs
Vraiment intéressant comme démarche !!!
#103800 Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
Posté par
sur 08 juin 2019 - 04:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je connais bien cette batterie, elle m'a lachée après 5 charges

Bon bah j'ai encore eu moins de chance que toi ... HS après seulement 2 cycles de charge ..
Du coup qqun connait une batterie en 12V 20Ah le plus compacte possible 😂?
#103430 Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
Posté par
sur 11 mai 2019 - 11:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
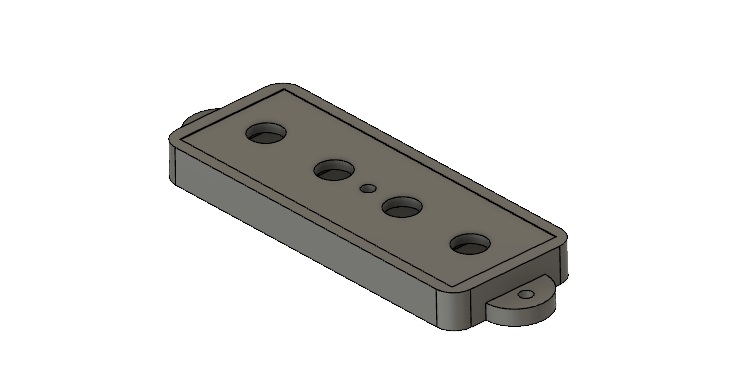
Ender 3 reçue hier , pareil pour les roues de monster truck de modélisme !
Premier print : le support/cache compas !

Mon fils commence à être jaloux de mon jouet
Donc quelques pièces à imprimer en attendant la carte électronique qui devrait arriver dans 2 semaines .
++
#103346 Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
Posté par
sur 08 mai 2019 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je suis faible ..j'ai commandé l'Ender 3 , elle arrive en fin de semaine !
Donc j'ai commencé à modeliser quelques pièces ..
* Un parechoc avec 2 capteurs ultrason HC-SR04 et un capteur PIR
* Un support latéral pour 1 capteur HC-SR04 : un par côté
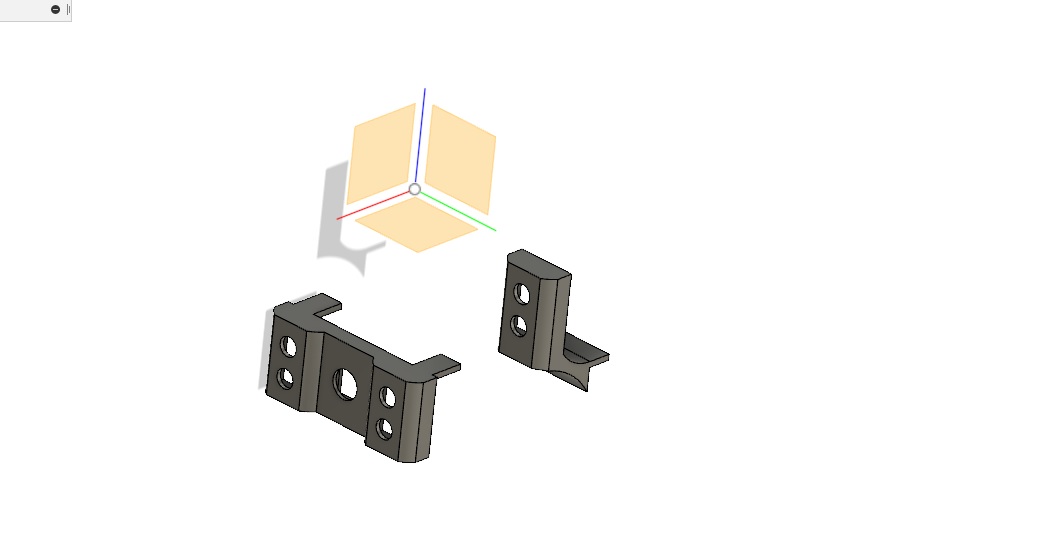
* Un support pour mes LED RGB. Elles me serviront de "statut/debug" , une par capteur ultrason .
* Et plus anedoctique , un support pour le compas numérique .
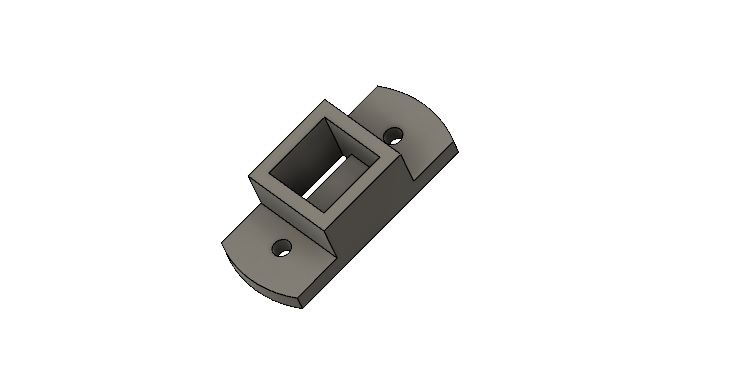
Je prévois de monter ces 2 dernières pièces sur le couvercle de ma boite de dérivation qui me sert de "box" principale
J'attends toujours mes nouvelles roues qui doivent arriver elles aussi en fin de semaine ...
#103221 Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
Posté par
sur 27 avril 2019 - 08:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
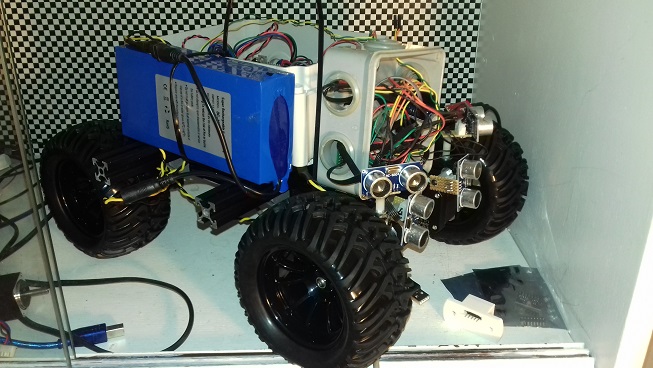
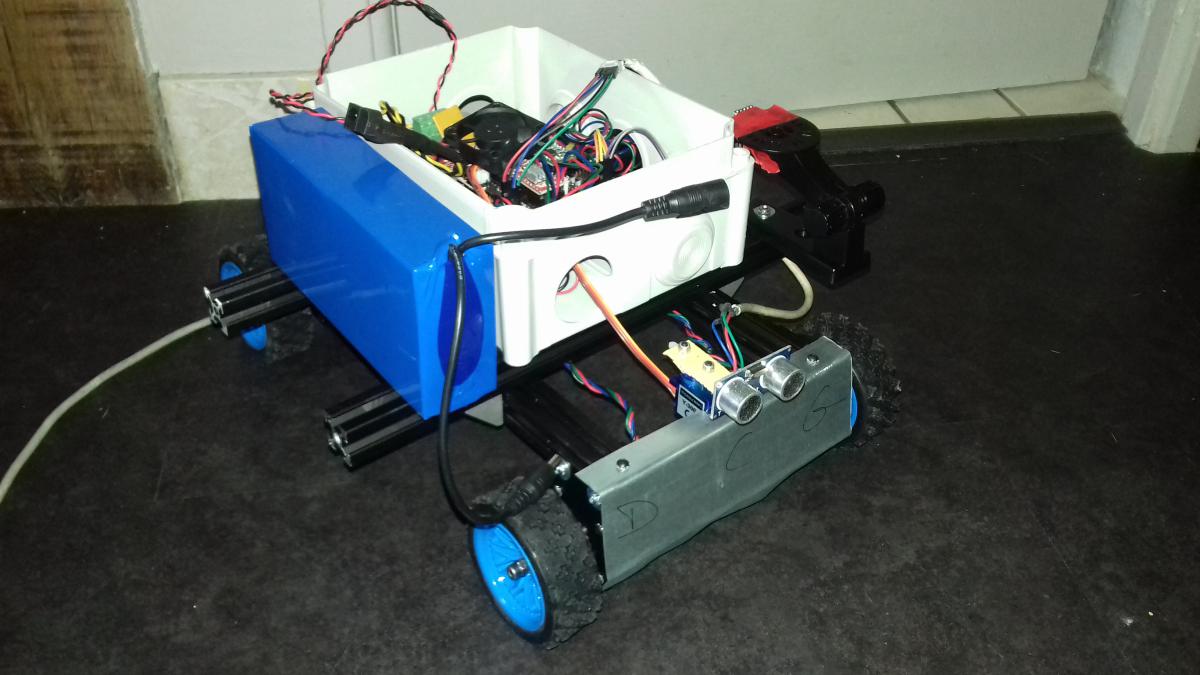
De la 3D au proto 😅.
Pris séparément :
- Ca roule
- Ca détecte et gère l'évitement.
- Ca connait son cap et quand on dévie
Il me reste à mixer le tout pour faire les premiers essais en liberté.
(Je vais rajouter un LCD pour le debug)
Pris séparément :
- Ca roule
- Ca détecte et gère l'évitement.
- Ca connait son cap et quand on dévie
Il me reste à mixer le tout pour faire les premiers essais en liberté.
(Je vais rajouter un LCD pour le debug)
Image(s) jointe(s)
#103104 Hashtag, mon Patrol'Bot 4WD - Avis Batterie 12V 20Ah
Posté par
sur 18 avril 2019 - 06:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
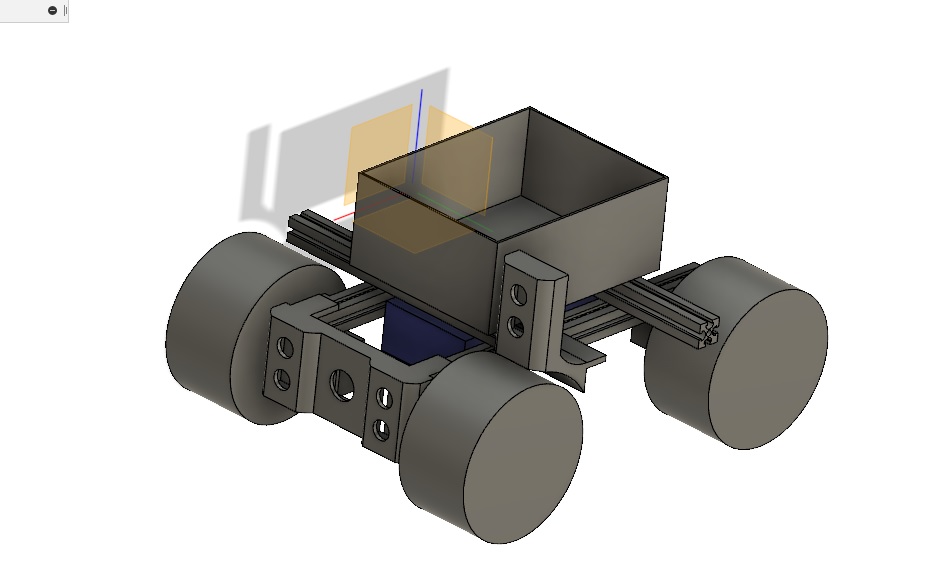
Je me suis fait une petite esquisse 3D sous Fusion 360 - je suis novice - :
Ca va me permettre de mieux dimensionner mes futures pièces que j'imprimerais en 3D .
J'ai "modélisé" les nouvelles roues .





