


L'état ce serait un int.

348 réponses à ce sujet
#282

Donovandu88
-
- Membres
-

- 680 messages
Membre passionné
- Gender:Male
Posté 13 février 2018 - 07:56
En fait il y a deux problèmes complètement distincts ...
=> La gestion de la communication ( Trame de communication )
=> La gestion des états du système ( Mise en place d'une machine à état )
Je veux bien aider sur l'un ou l'autre des points (ou les deux ) mais je vais être relou dans ce cas je veux que tu crées un sujet dédié dans la catégorie " programmation " du forum =)
Tu penses que c'est un problème assez gros qui mérite un sujet dédié? On pourrait en parler (dans le sujet dédié) de manière globale et je l’affinerais pour mon robot?
L'état ce serait un int.
D'accord, je vais voir ce que je peux faire alors. Merci
#284
Mike118
-

- Administrateur
-
- 10â¯294 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 13 février 2018 - 08:52
Tu penses que c'est un problème assez gros qui mérite un sujet dédié? On pourrait en parler (dans le sujet dédié) de manière globale et je l’affinerais pour mon robot?
Il ne faut pas hésiter à créer plusieurs sujets spécifique.
Ce sont des questions qui reviennent souvent et j'en ai marre de répondre dans N sujets différents aux mêmes questions ...
Oui on parle de ce problème spécifique de manière globale dans le sujet dédié bien entendu =) et oui tu l'affines ici mais on pourra mettre comme exemple ton cas dans le sujet =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#285
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 16 février 2018 - 02:19
Il ne faut pas hésiter à créer plusieurs sujets spécifique.
Ce sont des questions qui reviennent souvent et j'en ai marre de répondre dans N sujets différents aux mêmes questions ...
Oui on parle de ce problème spécifique de manière globale dans le sujet dédié bien entendu =) et oui tu l'affines ici mais on pourra mettre comme exemple ton cas dans le sujet =)
J'ai commencé à rédiger un sujet mais la communication est un sujet vraiment vaste. Il y a pleins de langages différents (dans mon cas, arduino et App inventor 2). Plusieurs technologies différentes comme le wifi, le bluetooth.
Donc je vais vite me paumer dans mon propre sujet sur la communication :kez_11: vu que je ne "maîtrise" que le bluetooth pour le moment avec Arduino.
#286
Mike118
-
- Administrateur
-
- 10â¯294 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 février 2018 - 02:58
Fais un sujet sur la communication uniquement dans ton cas  ne cherche pas à être trop général non plus.
ne cherche pas à être trop général non plus.
Expose ton problème concètement : " Protocole de communication pour faire communiquer une arduino et un smartphone en bluetooth avec app invertor 2 " =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#288
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 15 avril 2018 - 06:23
Salut !
J'ai beaucoup avancé dans mon application mais ce soir, je fessais des tests avant de faire une vidéo pour vous  et soudain c'est le drame
et soudain c'est le drame 
J'étais en train de porter un bouteille d'acétone quasiment vide avec le robot mais soudain, je vois de la fumer sortir du servo (un MG995). Je l'ouvre et la je vois que dedans il commençait à cramer
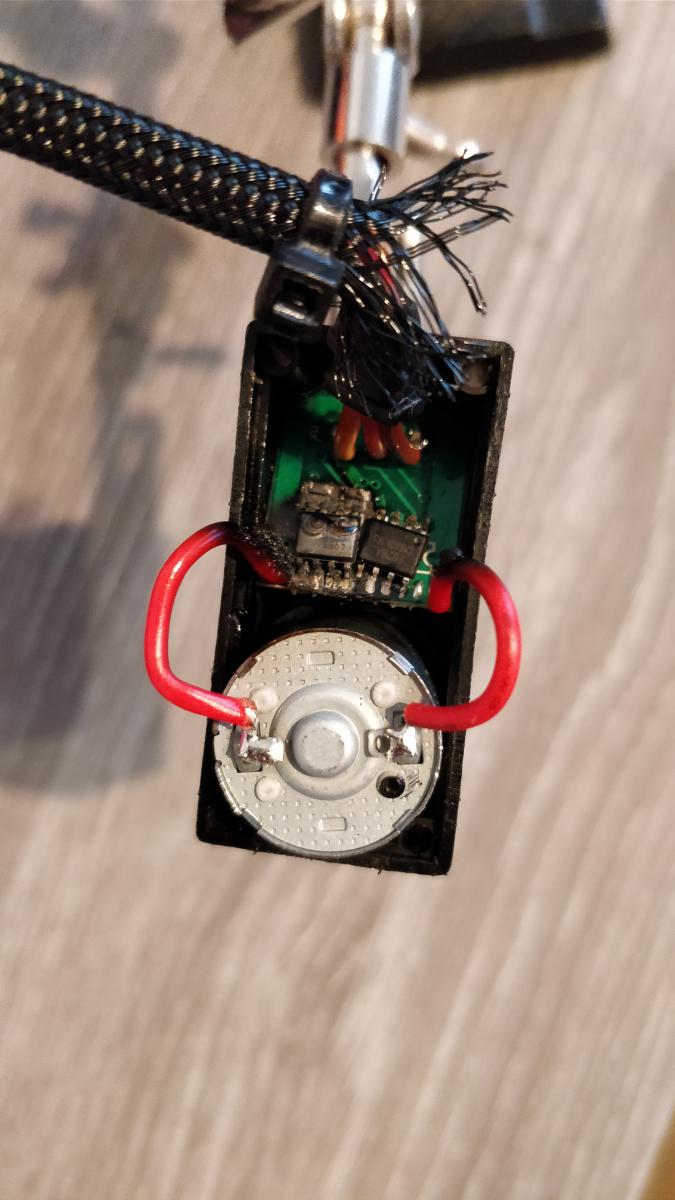
Je pense que sa viens du faite que le servo est commandé avec seulement deux angles, 90° pour fermer et 0° pour ouvrir. Donc si on choppe un gros objet, il ne ferme donc pas à fond et il force, ensuite il devient un barbecue 
J'aime bien la fonction barbecue sur mon bras robot même si elle n'était pas prévu depuis le départ  mais bon, il faut maintenant trouver une solution simple de comment attraper un objet avec la pince sans brûler le nouveau servo moteur. Une idée?
mais bon, il faut maintenant trouver une solution simple de comment attraper un objet avec la pince sans brûler le nouveau servo moteur. Une idée?


#292
Mike118
-
- Administrateur
-
- 10â¯294 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 15 avril 2018 - 07:11
Oui il y a des solutions :
0) ne pas commander en 0, 90 et envoyer la bonne consigne pour pas que ça ferme trop sur l'objet à prendre ou mette de la complience dans la pince comme le dit path
1) Mesure du courant et ajustement de la consigne de position en fonction du courant consommé pour éviter la surchauffe
2) Ouvrir le MG995, ajouter un fil de sortie pour le potentiomètre et mesurer la position du potentiomètre pour ajuster la consigne si le servo n'arrive pas à atteindre la position
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#293
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 15 avril 2018 - 07:50
La pince est molle pour éviter de forcer.
A-ton quand même une bonne force de serrage?
Oui il y a des solutions :
0) ne pas commander en 0, 90 et envoyer la bonne consigne pour pas que ça ferme trop sur l'objet à prendre ou mette de la complience dans la pince comme le dit path
1) Mesure du courant et ajustement de la consigne de position en fonction du courant consommé pour éviter la surchauffe
2) Ouvrir le MG995, ajouter un fil de sortie pour le potentiomètre et mesurer la position du potentiomètre pour ajuster la consigne si le servo n'arrive pas à atteindre la position
0) La bonne consigne c'est pas évidant de l'avoir si on soulève des objets différents.
1) Sous la forme d'un petit circuit qui est en série entre le servo et l'arduino pour mesurer ? ou de manière logiciel?
2) Surement une bonne solution afin de garder un léger courant pour garder la force de la pince.
#294
Mike118
-
- Administrateur
-
- 10â¯294 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 15 avril 2018 - 08:13
0) ou comme le dit path laisser de l'élasticité dans la pince.
1) avec un capteur de courant entre le servo moteur et son alimentation, l'arduino qui lit la valeur de courant et qui ajuste si nécessaire la consigne envoyée au servo.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#296
Jekert
-

- Modérateur
-
- 227 messages
Auteur
- Gender:Male
Posté 15 avril 2018 - 09:52
Et es-ce que le fait de fermer le servo X degrés par X degrés et de l'arrêter avec un simple microrupteur positionné à l'endroit où la pince est sensée prendre l'objet (et peut-être ajouter quelques degrés en plus pour avoir un peu plus d'adhérence) fonctionnerai ?
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute
#297
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 16 avril 2018 - 06:13
Je constate que ta pince n'est pas munie de patin de caoutchouc, http://www.robot-maker.com/forum/topic/11216-bras-robot-bcn3d-moveo/?p=91540
C'est très utile pour éviter que ça glisse et ainsi moins serrer.
Les grands élastiques, genre nouille, c'est ce qu'il y a de mieux.
C'est très utile pour éviter que ça glisse et ainsi moins serrer.
Les grands élastiques, genre nouille, c'est ce qu'il y a de mieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#299
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 16 avril 2018 - 07:54
Bon tant que je suis dans l'ajout de fils vers la pince, j'aimerais rajouter une articulation pour avoir la rotation du poigné pour être en 6DOF.
Pensez vous que sa serait une bonne solution d'utiliser un servo moteur ou vaut-il mieux un moteur pas à pas ?
L'avantage du servo c'est que c'est beaucoup plus léger et sa m'arrange pour le câblage. Mais peut être limité en couple (par rapport à sa taille).
Pensez vous que sa serait une bonne solution d'utiliser un servo moteur ou vaut-il mieux un moteur pas à pas ?
L'avantage du servo c'est que c'est beaucoup plus léger et sa m'arrange pour le câblage. Mais peut être limité en couple (par rapport à sa taille).
#300
Mike118
-
- Administrateur
-
- 10â¯294 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 avril 2018 - 09:20
Il te faut quoi comme couple ? Tu as quoi comme taille disponible ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet







Aussi étiqueté avec au moins un de ces mots-clés : bras robot
Projets et réalisations, robots et machines en tout genre →
Bras robots, pinces, tourelles, et autres manipulateurs →
Bras Robot pouvant porter jusqu'à 8Kg ?Débuté par Adri, 09 déc. 2020 |
|

|
||
Découvertes →
Projets collaboratifs →
Bras 6 axes BCN3D Moveo →
BCN3D Moveo et OpenCVDébuté par Kristoff, 22 oct. 2020 |
|

|
||
Découvertes →
Projets collaboratifs →
Bras 6 axes BCN3D Moveo →
Bcn3d firmwareDébuté par theo-paul, 05 juil. 2018 |
|

|
||
Découvertes →
Présentations de produits robotique →
Robots en kits →
Kit bras rotatif et pince robot [testé par mthibs]Débuté par mthibs, 31 mars 2017 |
|
|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




