

Bonjour à tous,
Ma demande rejoint dans les grandes lignes celle postée le 1er mai 2020 par "ntds" à laquelle se sont efforcé de répondre "oracid" , "mike118" et "sandro".
Je croyais, Ô miracle, en ouvrant ce post découvert par hasard en tapant sur Google « actionner un servo avec un capteur », trouver la solution que je cherchais puisque comme "ntds" je cherche à actionner un servomoteur pour faire un mouvement de 0 à 90° et revenir immédiatement à sa place en utilisant un capteur de présence fonctionnant de jour comme de nuit.
Dommage que la demande de "ntds" n’ait pas abouti, vos suggestions ne l’ayant pas satisfait à ce que j’ai compris. Donc vous n’avez pu développer.
Au fur et à mesure des nouvelles recherches entreprises sur le Net, j’ai compris qu’il me fallait investir dans un matériel adapté, c’est pourquoi j’ai acheté (avant de découvrir votre site
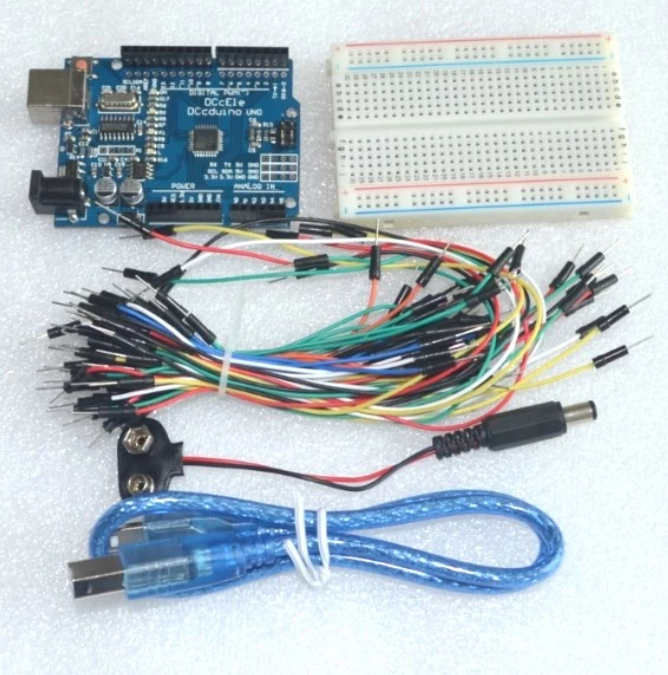
- 1 carte de développement UNO R3 compatible (Arduino non officielle mais ça ne devrait pas causer de problème)
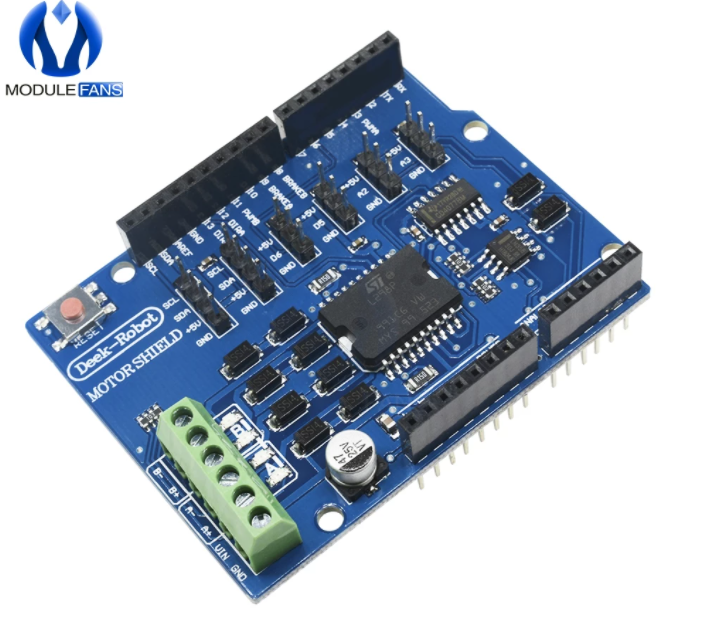
- 1 Shield L298P compatible Arduino R3 ( au cas où)
- 1 servo 20kg, alimentation 4,8-6,6V (excusez du peu)
- 1 Adaptateur secteur 9V 1A + 1 connecteur pile 9V (Je privilégie l'adaptateur secteur)
En revanche, je n’ai pas acheté le capteur ne sachant pas lequel conviendrait dans mon cas de figure.
Je précise que je suis un papi de 78 ans ayant bossé 21 ans dans un bureau d’étude en construction métallique pour la mise en œuvre du béton à l'aide de coffrages, et 20 ans comme technico-commercial dans la même branche, je n’y connais rien à l’électronique, ni à la programmation informatique mais j’ai constaté que pour mon projet, je devrai programmer ce qui me parait assez compliqué mais ce n'est peut être qu'une impression.
Voilà mon projet :
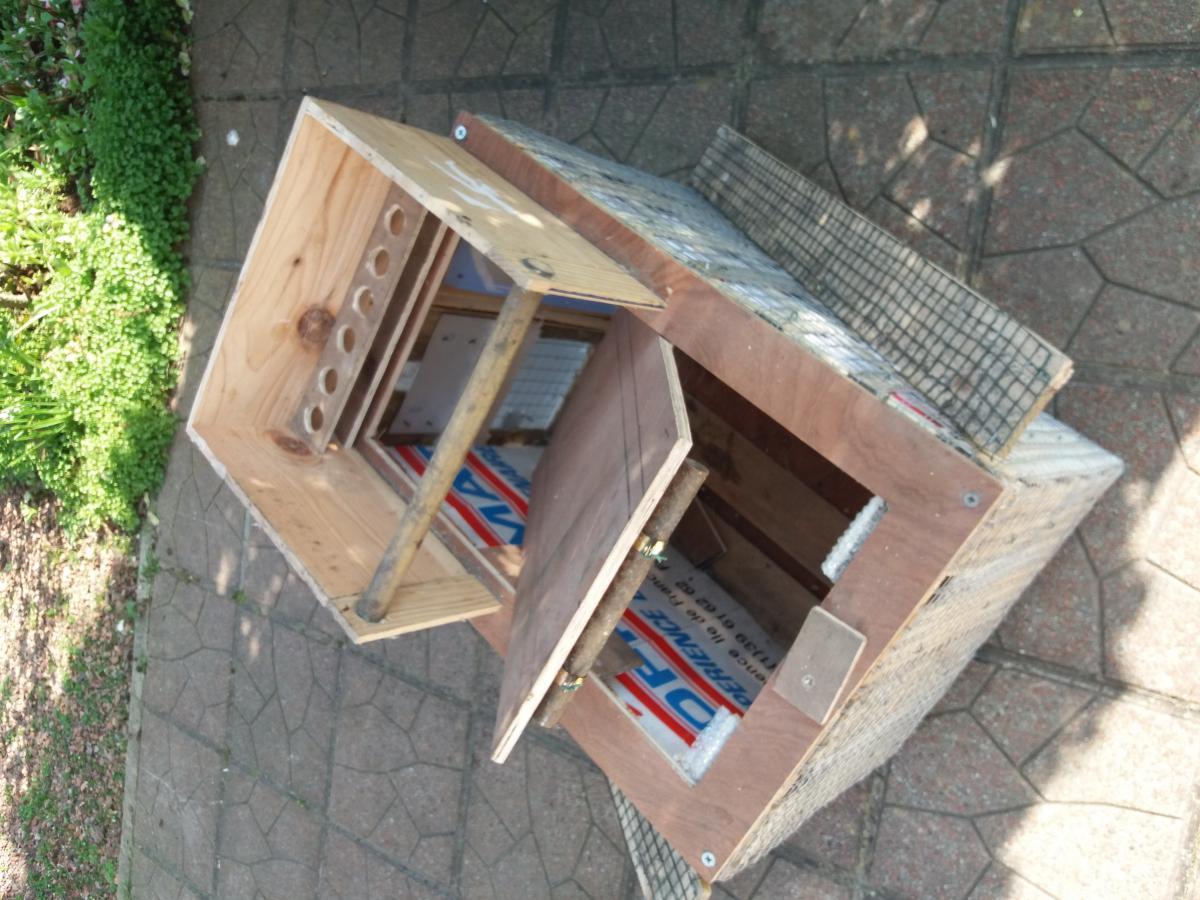
Etant envahi par des rats qui viennent piller mon poulailler, j’avais tenté de les capturer à l’aide d’un piège à trappe munie d’un contrepoids, mais sans résultat.
Les captures vidéo que j’ai réalisées la nuit montrent. que lorsqu’ils viennent sur la trappe au moindre frémissement de celle-ci, ils détalent. C'était sans compter avec leur méfiance.
Je souhaite conserver le principe de la trappe mais en l’aménageant différemment.
Ce qu’il faudrait pour le bien, c’est une trappe que commanderait un capteur. Dès que les "bébètes" s’engageraient complètement sur la trappe, pour rejoindre une réserve de nourriture aménagée pour les appâter, le capteur disposé sur une paroi du tunnel d'accès à la mangeoire à proximité de cette dernière, détecterait leur museau et enverrait un signal au servo qui actionnerait immédiatement la trappe envoyant les rongeurs dans une caisse située juste en dessous. La trappe se refermant aussitôt avec une toute petite temporisation (3/4 de seconde), le temps qu'ils arrivent au fond, les rats se retrouveraient "piégés".
Ce qui m’a incité à poursuivre ce projet après l'échec du piège avec contrepoids sur la trappe, c’est une vidéo réalisée par un dératiseur professionnel pour un appareil qui est destiné à piéger des rats grâce à une trappe basculante commandée par un capteur de présence. (juste ce qu'il me faut mais trop chère pour moi car plus de 1500 €)
(Vu que tout le monde peut la voir, Je vous joins le lien sans pour autant en faire la pub)
Je pense vous avoir tout dit de mes attentes. Je souhaite simplement recevoir les instructions qui me permettront de les concrétiser autrement dit savoir quoi faire et comment le faire sachant que ce domaine m’est complètement étranger. (Branchement et programmation de la carte de développement UNO R3)
Je compte dans un 1er temps modifier mon piège en y incorporant une trappe qui sera actionnée par un servo grâce à un capteur, avec un faisceau dont l’angle d’action leur laisserait le temps de bien s'engager sur la trappe avant qu'elle bascule, ( quitte à disposer un cache pour éviter de détecter leur présence trop tôt).
Si le système fonctionne comme prévu, j'en ferai un 2ème, toujours sur le principe de la trappe basculant de 90°, mais qui serait actionnée par un piston linéaire (vérin ) 12V..course 150 mm (vitesse 150 mm/s)
Là aussi j'aurais besoin d'avis éclairés pour la programmation, mais on n’en est pas encore là.
A votre disposition pour tout renseignement complémentaire.
Pièces jointes :
Photos piège actuel (avec contrepoids) =>


Vidéo 1 : piège avec contrepoids « en service »
 videoPiegeRat.zip 21,49 Mo
204 téléchargement(s)
videoPiegeRat.zip 21,49 Mo
204 téléchargement(s)
Vidéo 2 : piège avec trappe automatique (You Tube)
Fichier(s) joint(s)
-
 watch piège avec capteur.htm 1,19 Mo
584 téléchargement(s)
watch piège avec capteur.htm 1,19 Mo
584 téléchargement(s)




 )
) 


 . Tu peux par exemple utiliser A2 (ou A3 ... A5)
. Tu peux par exemple utiliser A2 (ou A3 ... A5)
















