Mon contenu
Mon contenu Homme
Homme






Cliquez moi.
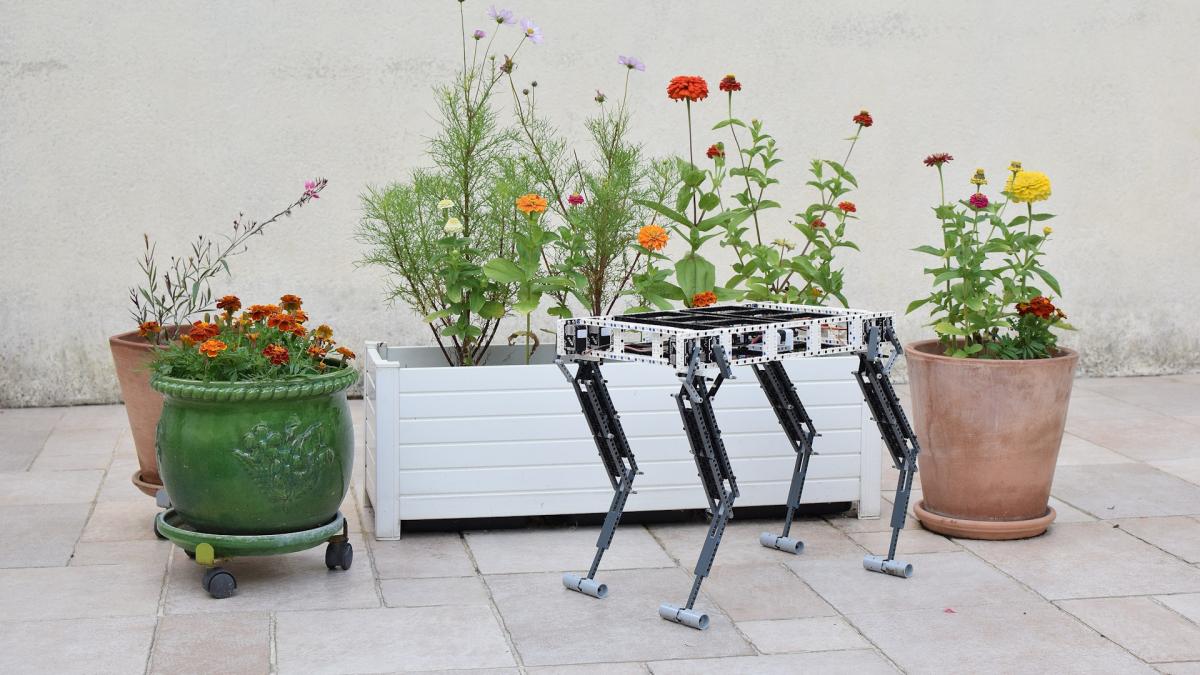
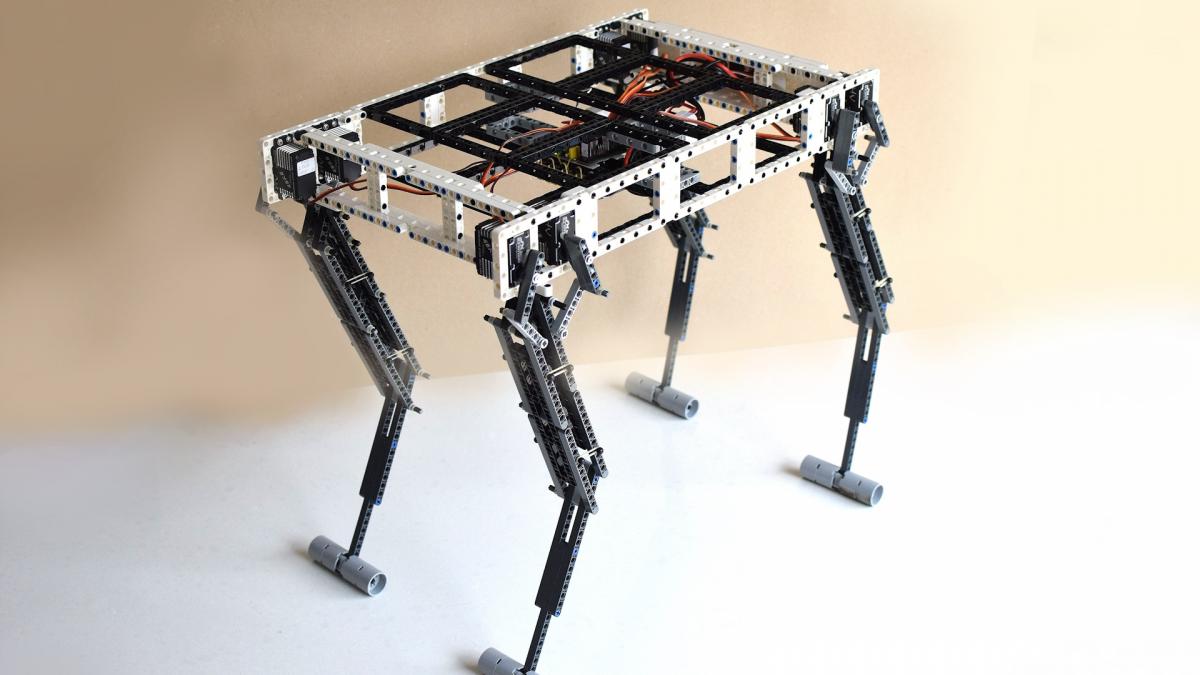
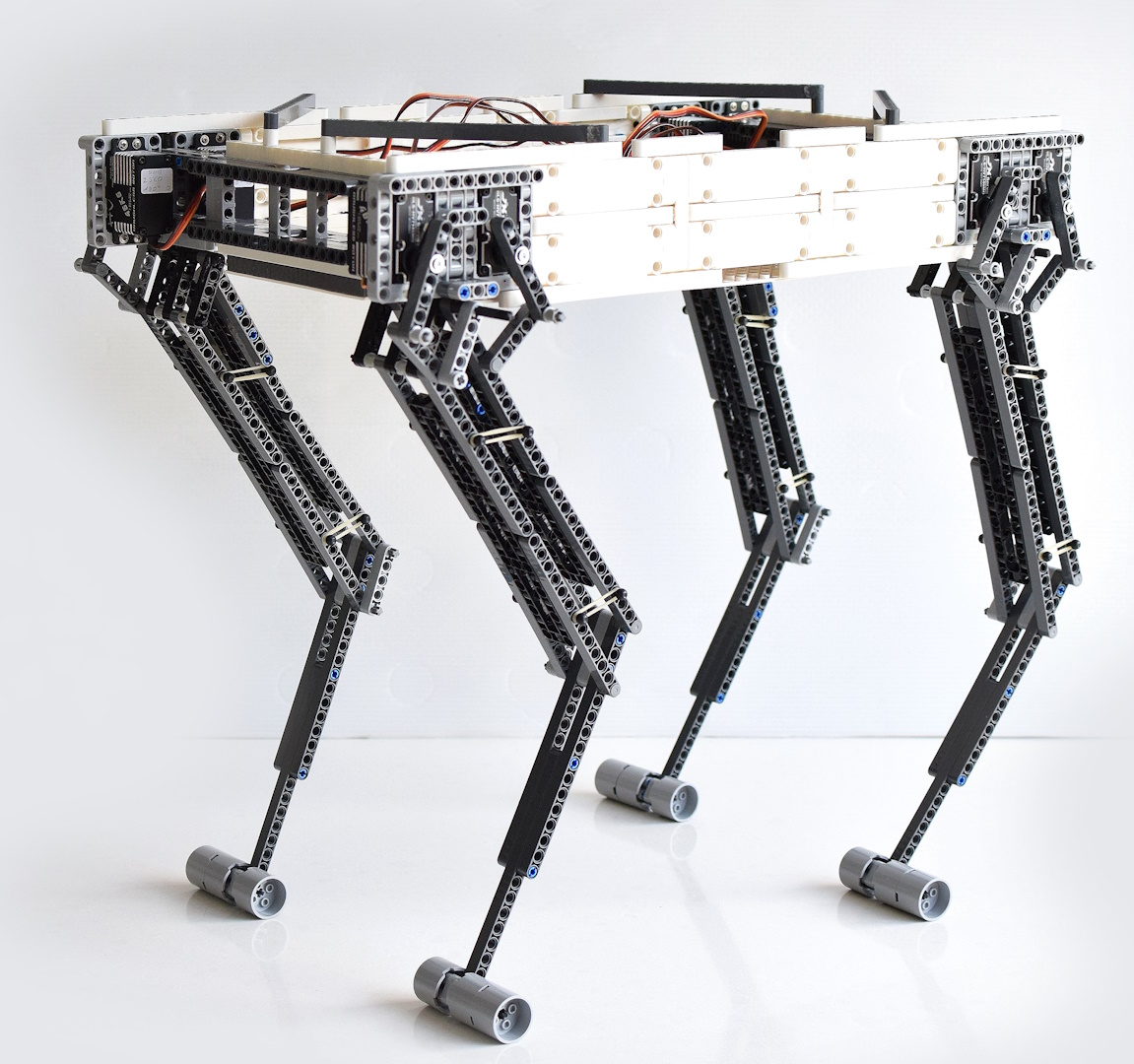
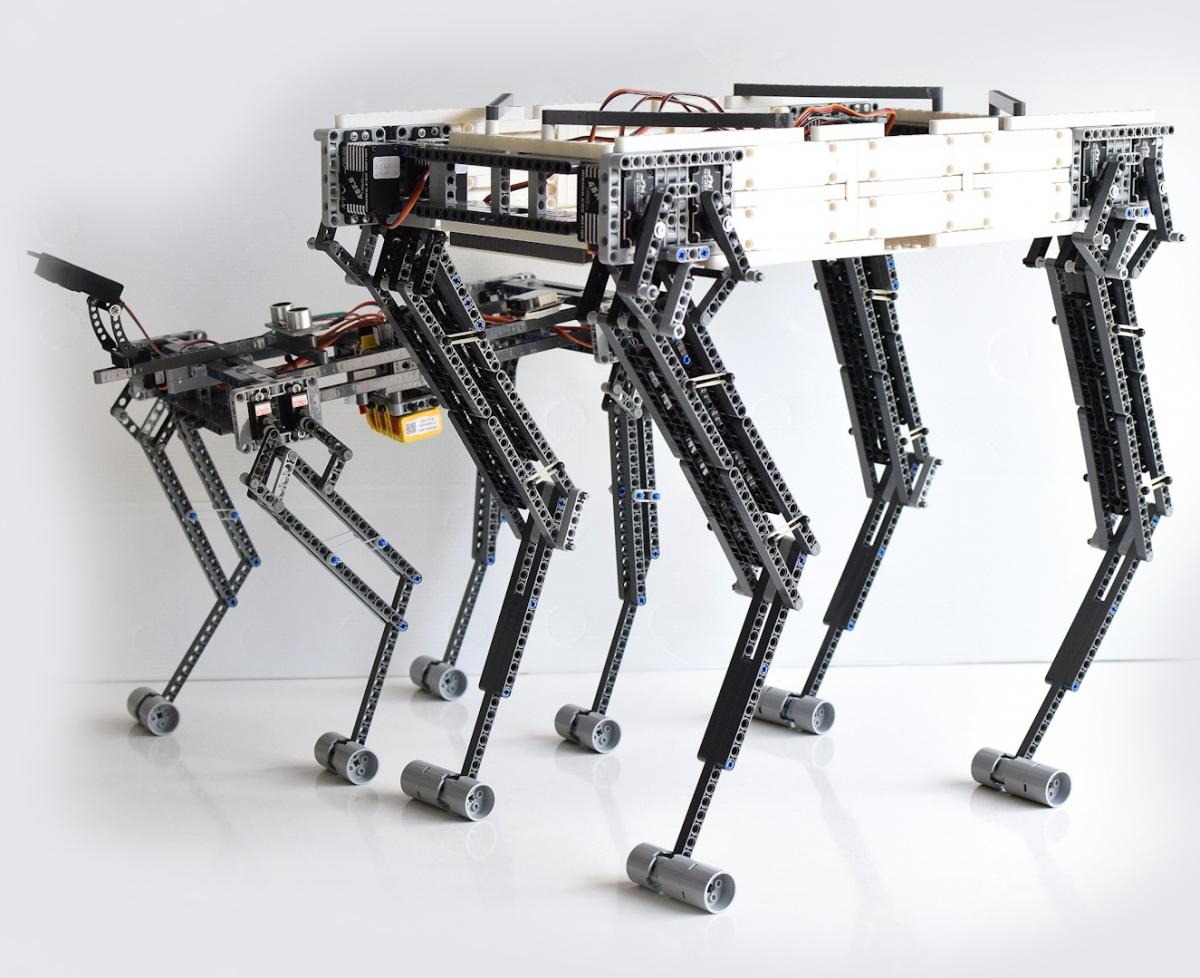
Une photo, pour illustrer ce sujet. Il est fatigué, là. Il a travaillé toute la matinée. Un peu de douceur lui fait du bien . . .
Alors, non, la charge de la batterie, n'est pas un paramètre qui varie. La batterie est totalement chargée, à 8.4V, quand je valide un test.
Ce matin, j'ai fait des tests sans élastique et j'ai obtenu 10,50m en 6 secondes avec une longueur d'itération à 20mm et un delayMicroseconds(2600).
Puis j'ai fait des tests, toujours sans élastique, en diminuant la longueur d'itération à 15mm et un delayMicroseconds(1650).
Le résultat est de 9,5m en 5,5 secondes.
C'est toujours intéressant de diminuer la longueur d'itération. L'allure est plus fluide.
Malheureusement, je ne crois pas que ce soit possible d'atteindre les 10m / 5s, sans augmenter la longueur d'itération.
Par ailleurs, pour amortir le mouvement, je pense quand même garder un ou deux élastiques par pattes.
Le code.