
 Mon contenu
Mon contenu Homme
Homme






Excellent ! Vraiment !
Petite question. Pourquoi as-tu rendu solidaire les yeux et les servos, plutôt que de coupler les yeux avec les palonniers des servos.
Avec ta solution, les servos doivent soulever leur propre poids, ce qui est lourd.
Alors qu'avec la solution classique, chaque servo n'aurait qu'à déplacer son palonnier et son morceau de carton, ce qui est très léger.
#99165 Reconnaissance de carte en lego mindstorm
 Posté par
- 23 septembre 2018 - 05:55
Posté par
- 23 septembre 2018 - 05:55
Très beau boulot !
En fin de compte, peux-tu nous faire un petit résumé en listant les problèmes et les solutions ?
En fin de compte, peux-tu nous faire un petit résumé en listant les problèmes et les solutions ?
- pmdd aime ceci
#99156 Toulouse Robot Race 2018
Posté par
- 22 septembre 2018 - 08:46
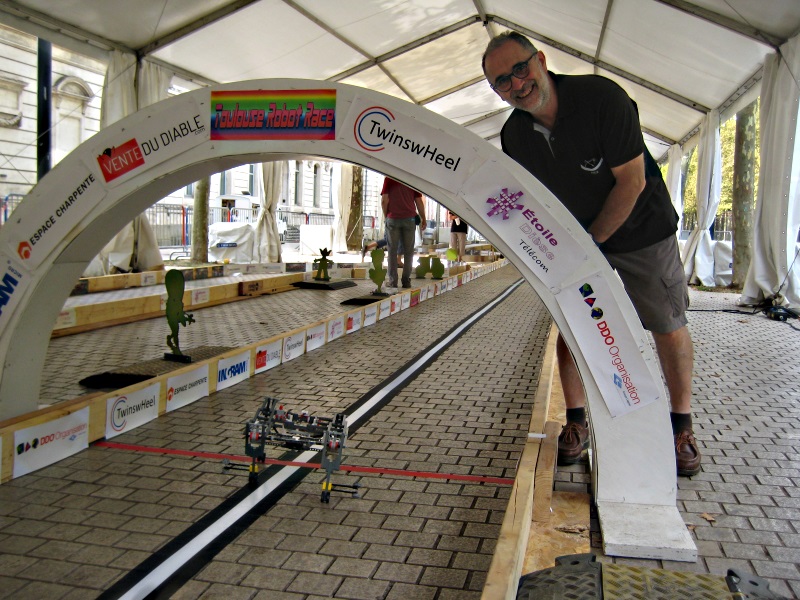
Et bien, j'ai remporté le premier prix dans la catégorie Multipattes.
Aussi loin que je me souvienne, c'est la première fois que je remporte un prix.
Imaginez ma joie.
Voici quelques photos, j'ai privilégié les réalisations en Lego qui n'ont pas démérité, loin de là !


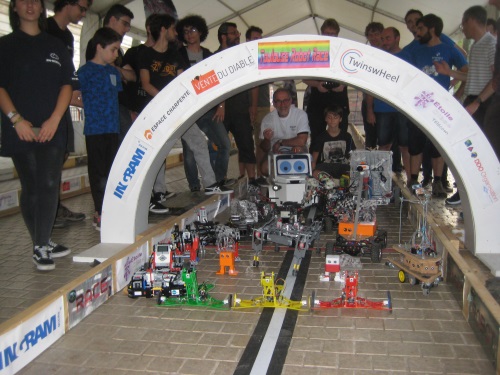




<j'ai demandé l'autorisation pour la publication de ces photos>
Aussi loin que je me souvienne, c'est la première fois que je remporte un prix.
Imaginez ma joie.
Voici quelques photos, j'ai privilégié les réalisations en Lego qui n'ont pas démérité, loin de là !
<j'ai demandé l'autorisation pour la publication de ces photos>
#99054 Toulouse Robot Race 2018
Posté par
- 17 septembre 2018 - 01:10
Vendredi, c'est le jour des tests, la météo va être mauvaise. Heureusement que le circuit sera couvert.
Par contre samedi, grand beau temps.
Je pars demain matin, j'ai prévu 3 jours pour descendre à Toulouse. Je vais m'arrêter dans 2 jolis petits villages.
Par contre samedi, grand beau temps.
Je pars demain matin, j'ai prévu 3 jours pour descendre à Toulouse. Je vais m'arrêter dans 2 jolis petits villages.
- Thot, Mike118, gerardosamara et 1 autre aiment ceci
#98960 Un petit lien vers des techniques d'assemblage de pièces imprimées en 3D
Posté par
- 11 septembre 2018 - 08:01
Je ne sais pas si cela pourrait coller l'ABS des impressions 3D.
J'ai essayé de coller des pièces Lego en ABS et cela fonctionne très bien, alors je ne vois pas pourquoi cela ne fonctionnerait pas pour des impressions 3D en ABS.
Le lien, ici, http://www.robot-maker.com/forum/topic/12330-coller-des-lego/
J'ai essayé de coller des pièces Lego en ABS et cela fonctionne très bien, alors je ne vois pas pourquoi cela ne fonctionnerait pas pour des impressions 3D en ABS.
Le lien, ici, http://www.robot-maker.com/forum/topic/12330-coller-des-lego/
- Forthman aime ceci
#98959 Coller des Lego
Posté par
- 11 septembre 2018 - 06:45
Il m'est arrivé de vouloir coller des Lego, mais sans grand succès.
Aujourd'hui, j'ai testé une colle qui m'à l'air pas mal.
Je l'ai appliquée par petits points de colle avec un cure dents en bois sur 2 poutres 7L.
Il faut serrer les 2 pièces pendant 10 secondes. Pour l'alignement, j'ai utilisé 2 pin 3L bleu que j'ai pu retirer ensuite.
Après 24h, il m'a été impossible de casser la jonction.
Pour moi, cela me permettra de faire des poutres de grandes dimensions.
Voici un lien, https://www.leroymer...00#avis-details, mais on doit pouvoir la trouver partout.

Aujourd'hui, j'ai testé une colle qui m'à l'air pas mal.
Je l'ai appliquée par petits points de colle avec un cure dents en bois sur 2 poutres 7L.
Il faut serrer les 2 pièces pendant 10 secondes. Pour l'alignement, j'ai utilisé 2 pin 3L bleu que j'ai pu retirer ensuite.
Après 24h, il m'a été impossible de casser la jonction.
Pour moi, cela me permettra de faire des poutres de grandes dimensions.
Voici un lien, https://www.leroymer...00#avis-details, mais on doit pouvoir la trouver partout.
#98943 openDog, le quadrupède de James Bruton
Posté par
- 11 septembre 2018 - 07:12
Premiers tests des moteurs.
Si vous n'avez pas la patience, allez directement à 22'06".
Si vous n'avez pas la patience, allez directement à 22'06".
- Budet aime ceci
#98931 Gato, mon petit quadrupède
Posté par
- 10 septembre 2018 - 04:34
Prêt pour Toulouse !
Là, je n'utilise pas le détecteur à ultrasons pour détecter le portique, il pose trop de problèmes.
Il s'agit d'une simple temporisation. Je pense que c'est ce que je vais faire à Toulouse.
Comme Big Toy ne va pas très droit, je l'ai affublé de petite moustaches avec des roulettes à leur extrémités qui le remettent sur le droit chemin en prenant appui sur les bastaings.
C'est une configuration identique à celle de Toulouse.
Là, je n'utilise pas le détecteur à ultrasons pour détecter le portique, il pose trop de problèmes.
Il s'agit d'une simple temporisation. Je pense que c'est ce que je vais faire à Toulouse.
Comme Big Toy ne va pas très droit, je l'ai affublé de petite moustaches avec des roulettes à leur extrémités qui le remettent sur le droit chemin en prenant appui sur les bastaings.
C'est une configuration identique à celle de Toulouse.
#98896 L'oscilloscope
Posté par
- 08 septembre 2018 - 11:14
Suite à l'échange que j'ai eu avec Cocothebo, http://www.robot-maker.com/forum/topic/11656-au-bistrot-du-coin/?p=98866, je me suis dit qu'il serait intéressant d'avoir un fil traitant des oscilloscopes, en particulier pour savoir comment cela fonctionne.
Alors, ce n'est pas moi qui va vous l'expliquer, mes compétences étant très limitées en la matière.
J'ai préféré vous proposer 2 vidéos, en français.
- La première est plutôt pour les nuls (comme moi). J'ai eu la patience d'aller jusqu'au bout et j'ai appris beaucoup de chose.
- La deuxième est la première d'une série de 13, et est plus complète. Pour ceux qui veulent approfondir.
Alors, ce n'est pas moi qui va vous l'expliquer, mes compétences étant très limitées en la matière.
J'ai préféré vous proposer 2 vidéos, en français.
- La première est plutôt pour les nuls (comme moi). J'ai eu la patience d'aller jusqu'au bout et j'ai appris beaucoup de chose.
- La deuxième est la première d'une série de 13, et est plus complète. Pour ceux qui veulent approfondir.
#98895 Au bistrot du coin ...
Posté par
- 08 septembre 2018 - 11:04
Encore un volontaire pour nous faire un tuto...Mon équipe a utilisé ROS pour notre projet de fin d'études ...
- Mike118 aime ceci
#98817 Servo RD-B7640HV-180 de JX - 40kg.cm
Posté par
- 03 septembre 2018 - 01:46
Reçus !je les ai commandés ici, https://fr.aliexpres....3da26c37OdtBqG
Attention, c'est du 360° que j'ai commandé.
Pour l'instant, je suis occupé ailleurs, mais je ne tarderai sans doute pas à les mettre en oeuvre.
- Oliver17 aime ceci
#98767 Les meilleurs vidéos LEGO
Posté par
- 31 août 2018 - 11:00
La video sur YouTube :Si c'est vrai c'est fort !
https://www.facebook...33496553983107/
- thermo_nono aime ceci
#98753 Gato, mon petit quadrupède
Posté par
- 30 août 2018 - 01:44
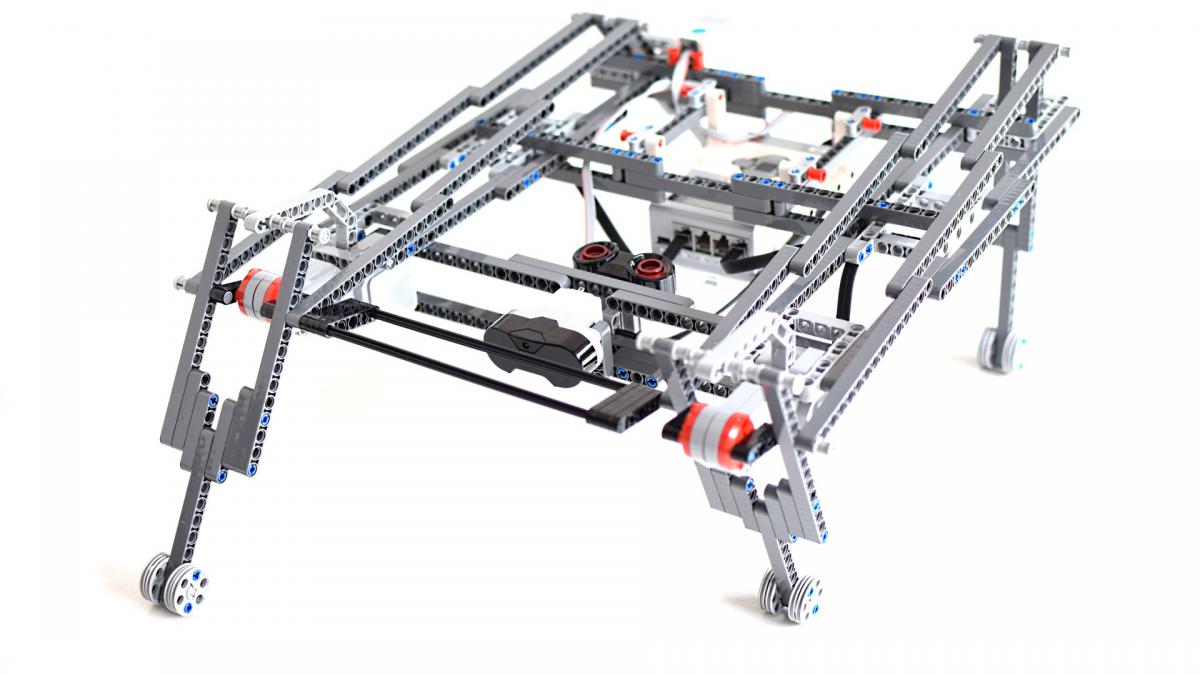
Nouvelle version de Big Toy. Encore plus grand. Il gagne 3cm en longueur et 2cm en largeur.
L'objectif est de contrôler sa trajectoire en ligne droite en augmentant sa taille. Il a tendance à dériver.
Et puis, plus il est gros et plus ce sera spectaculaire à Toulouse.
Là, je pense avoir atteint le maximum avec ces servos. J'ai fait quelques tests.
Avec cette version il parcourt les 10m (piste de la Toulouse Robot Race) en 36". Ce qui fait 1kmh.
Vous pouvez voir un capteur US orienté vers le haut, il détectera le portique marquant la fin de la piste. http://toulouse-robot-race.org/
A l'arrière, on voit mal sur la photo, il y a un bouton poussoir qui lance le quadrupède.
J'ai fait un petit programme simplissime qui calcule précisément le temps écoulé.
Caractéristiques :
- Poids : 895g
- Taille du corps, longueur 37cm, largeur 32cm
- Pattes : 15cm (susceptible de modification, en fonction des tests)
- 2 servos alimentés en 7,4V par l'EV3. (caractéristiques en 9V: 175RPM, 4,5kg.cm
- un EV3
Cliquez moi.
L'objectif est de contrôler sa trajectoire en ligne droite en augmentant sa taille. Il a tendance à dériver.
Et puis, plus il est gros et plus ce sera spectaculaire à Toulouse.
Là, je pense avoir atteint le maximum avec ces servos. J'ai fait quelques tests.
Avec cette version il parcourt les 10m (piste de la Toulouse Robot Race) en 36". Ce qui fait 1kmh.
Vous pouvez voir un capteur US orienté vers le haut, il détectera le portique marquant la fin de la piste. http://toulouse-robot-race.org/
A l'arrière, on voit mal sur la photo, il y a un bouton poussoir qui lance le quadrupède.
J'ai fait un petit programme simplissime qui calcule précisément le temps écoulé.
Caractéristiques :
- Poids : 895g
- Taille du corps, longueur 37cm, largeur 32cm
- Pattes : 15cm (susceptible de modification, en fonction des tests)
- 2 servos alimentés en 7,4V par l'EV3. (caractéristiques en 9V: 175RPM, 4,5kg.cm
- un EV3
Cliquez moi.
- Oliver17 aime ceci




