 Actuellement le pupitre se résume à ce que représente la photographie de la Fig.384 et n’est pas très convivial, c’est le moins que l’on puisse dire. Aussi, on va devoir « tasser » tout ce petit monde dans un coffret, y ajouter les accumulateurs d’énergie, et le clavier bien plus grand que celui visible en 7. Bref, si l’on veut aboutir à un coffret relativement modeste en dimensions il va falloir tasser. Ce n’est jamais facile, et ce d’autant plus que l’assemblage et la maintenance doivent rester faciles. Bref, une étude des circuits imprimés s’avère indispensable et doit évoluer simultanément avec la genèse des dessins du coffret. Dans ce didacticiel on va avancer chapitre par chapitre, mais la conception aura été globalement achevée avant de rédiger le tutoriel. Examinons au passage l’ensemble de développement avec en 1 la ligne ombilicale des données qui va vers JEKERT. En 2 le petit écran OLED est bridé sur le support 3 qui l’oriente convenablement et le maintien « au dessus de la mêlée ». Nettement visible la ligne standard USB permet de programmer le microcontrôleur caché sous « la tignasse » 5 qui domine la petite plaque à essais. Assisté par un autre module de branchement en 4 se trouvent diverses LEDs dont la tricolore. En 6 on observe l’adaptateur de multiplexage du petit clavier matriciel 7, avec en 8 le codeur rotatif. En 9 une plaque à essais sert de base de départ pour le cordon ombilical. En 10 se trouve un petit module dont on utilise le mini contacteur pour déporter le RESET, car sous la canopée 5 celui de la carte NANO Arduino est inaccessible. Enfin en 11 un petit module comportant un inverseur double permet d’isoler la ligne TX/RX de dialogue entre les deux microcontrôleurs quand on téléverse un programme dans la mémoire de l’un d’entre eux. Vous pouvez observer que pour « aérer » l’ensemble, plusieurs lignes sont regroupées par des petites torsades, facilitant les innombrables interventions lors du développement.
Actuellement le pupitre se résume à ce que représente la photographie de la Fig.384 et n’est pas très convivial, c’est le moins que l’on puisse dire. Aussi, on va devoir « tasser » tout ce petit monde dans un coffret, y ajouter les accumulateurs d’énergie, et le clavier bien plus grand que celui visible en 7. Bref, si l’on veut aboutir à un coffret relativement modeste en dimensions il va falloir tasser. Ce n’est jamais facile, et ce d’autant plus que l’assemblage et la maintenance doivent rester faciles. Bref, une étude des circuits imprimés s’avère indispensable et doit évoluer simultanément avec la genèse des dessins du coffret. Dans ce didacticiel on va avancer chapitre par chapitre, mais la conception aura été globalement achevée avant de rédiger le tutoriel. Examinons au passage l’ensemble de développement avec en 1 la ligne ombilicale des données qui va vers JEKERT. En 2 le petit écran OLED est bridé sur le support 3 qui l’oriente convenablement et le maintien « au dessus de la mêlée ». Nettement visible la ligne standard USB permet de programmer le microcontrôleur caché sous « la tignasse » 5 qui domine la petite plaque à essais. Assisté par un autre module de branchement en 4 se trouvent diverses LEDs dont la tricolore. En 6 on observe l’adaptateur de multiplexage du petit clavier matriciel 7, avec en 8 le codeur rotatif. En 9 une plaque à essais sert de base de départ pour le cordon ombilical. En 10 se trouve un petit module dont on utilise le mini contacteur pour déporter le RESET, car sous la canopée 5 celui de la carte NANO Arduino est inaccessible. Enfin en 11 un petit module comportant un inverseur double permet d’isoler la ligne TX/RX de dialogue entre les deux microcontrôleurs quand on téléverse un programme dans la mémoire de l’un d’entre eux. Vous pouvez observer que pour « aérer » l’ensemble, plusieurs lignes sont regroupées par des petites torsades, facilitant les innombrables interventions lors du développement.
Le dessin du circuit imprimé.
Outre le circuit du clavier déjà étudié, le pupitre intègre cinq autres modules que nous allons analyser séparément. Commençons par le plus important, celui qui supporte la carte NANO Arduino et divers composants qui y sont reliés. Bien que très petit, le circuit comporte un grand nombre de composants, et comme nous allons le constater, les torons de liaison dans le coffret occupent un volume considérable en proportion des circuits imprimés. C’est du reste cette connectique qui a engendré beaucoup d’études pour s’assurer de la faisabilité. Bien que figurant sur le livret DOSSIER TECHNIQUE, le schéma électrique de branchement du microcontrôleur est reproduit sur la Fig.385 car le circuit imprimé décrit sur la Fig.386 en découle directement.![]()
En vis à vis du schéma électronique, dans le manuel vous avez la page d’affectation des broches d’entrées et de sorties. Il est indispensable de consulter cette page pour établir le lien entre le schéma et le dessin du circuit imprimé. Il importera également de faire référence à ces informations quand on passera à l’étude de l’interconnexion des divers modules entre eux dans le coffret.
 Lorsque le boitier sera achevé et qu’il sera fermé, la carte NANO ne sera plus accessible et le bouton de RESET deviendra indisponible. On disposera toutefois d’un petit connecteur HE14 en 1 face à une petit ouverture pour pouvoir reprogrammer facilement à notre guise le microcontrôleur si l’on désire modifier le logiciel. Par ailleurs, sur la face avant seront disponibles certains témoins lumineux « techniques ». Par exemple en 2 on notera que deux diodes électroluminescentes indiqueront l’état des deux contacts DT et CLK du codeur rotatif. Quand on tourne ce dernier, les deux LEDs clignotent en fonction de l’état logique de chaque contact électrique. Lors des interventions techniques, cette information s’est avérée bien utile, notamment en programmation quand le logiciel ne présente pas le comportement attendu. Également précieux en 3 les deux témoins lumineux qui s’illuminent lors des dialogues entre les deux processeurs. Si TX s’illumine et que RX reste éteint, c’est que le dialogue série n’est pas effectif. Du coup le programme se bloque. Pouvoir visualiser les échanges de données entre les deux cartes électroniques est pratiquement indispensable pour le suivi technique de l’ensemble. Notez au passage que sur le schéma de la Fig.385 le symbole d’un picot (@) précise que la broche du microcontrôleur va sur un connecteur de type HE14 mâle soudés directement sur le circuit imprimé. C’est le cas en 4 pour le dialogue série, en 5 pour la liaison avec le codeur rotatif et en 6 pour l’afficheur OLED. Pour les autres liaisons les connecteurs sont situés aux extrémités de lignes filaires reliées en torons électriques. En 7 une LED bleue atteste du « ronronnement » de la boucle de base du programme. Quand elle clignote, le processeur déroule les instructions de void loop. Si elle reste allumée ou éteinte en permanence, c’est soit que
Lorsque le boitier sera achevé et qu’il sera fermé, la carte NANO ne sera plus accessible et le bouton de RESET deviendra indisponible. On disposera toutefois d’un petit connecteur HE14 en 1 face à une petit ouverture pour pouvoir reprogrammer facilement à notre guise le microcontrôleur si l’on désire modifier le logiciel. Par ailleurs, sur la face avant seront disponibles certains témoins lumineux « techniques ». Par exemple en 2 on notera que deux diodes électroluminescentes indiqueront l’état des deux contacts DT et CLK du codeur rotatif. Quand on tourne ce dernier, les deux LEDs clignotent en fonction de l’état logique de chaque contact électrique. Lors des interventions techniques, cette information s’est avérée bien utile, notamment en programmation quand le logiciel ne présente pas le comportement attendu. Également précieux en 3 les deux témoins lumineux qui s’illuminent lors des dialogues entre les deux processeurs. Si TX s’illumine et que RX reste éteint, c’est que le dialogue série n’est pas effectif. Du coup le programme se bloque. Pouvoir visualiser les échanges de données entre les deux cartes électroniques est pratiquement indispensable pour le suivi technique de l’ensemble. Notez au passage que sur le schéma de la Fig.385 le symbole d’un picot (@) précise que la broche du microcontrôleur va sur un connecteur de type HE14 mâle soudés directement sur le circuit imprimé. C’est le cas en 4 pour le dialogue série, en 5 pour la liaison avec le codeur rotatif et en 6 pour l’afficheur OLED. Pour les autres liaisons les connecteurs sont situés aux extrémités de lignes filaires reliées en torons électriques. En 7 une LED bleue atteste du « ronronnement » de la boucle de base du programme. Quand elle clignote, le processeur déroule les instructions de void loop. Si elle reste allumée ou éteinte en permanence, c’est soit que 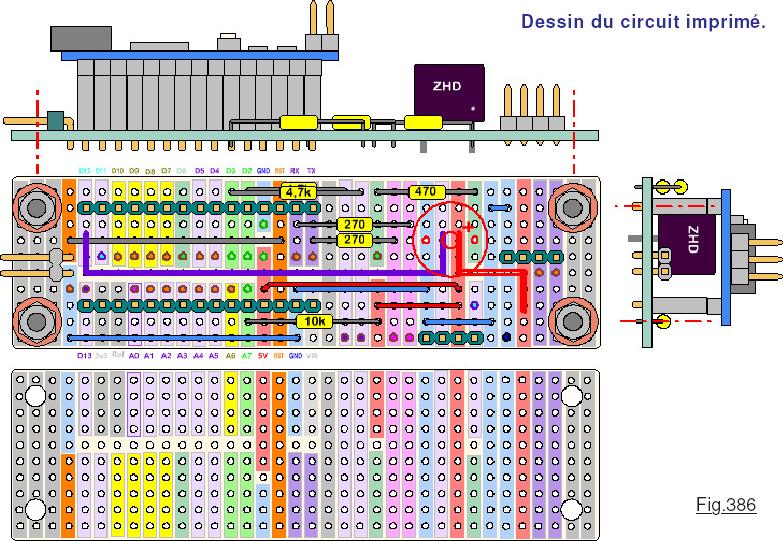 l’ATmega328 est occupé dans d’autres séquences du programme, (Tout va bien.) soit que le programme est « planté ». On se doute que cette LED n’est vraiment utile qu’en mise au point des programmes.
l’ATmega328 est occupé dans d’autres séquences du programme, (Tout va bien.) soit que le programme est « planté ». On se doute que cette LED n’est vraiment utile qu’en mise au point des programmes.
Comme toutes ces informations lumineuses ne sont utiles qu’à des périodes très spécifiques et surtout particulièrement gênantes en exploitation de la sonde, le commutateur INV en 8 permet de les éteindre quand on ne veut plus qu’elles titillent exagérément notre attention.
Présentation du pupitre.
Comprendre un schéma et sa logique n’est pas du tout aisé si l’on n’a pas bien présent à l’esprit ce qu’il est supposé représenter par des symboles conventionnels. Pour mieux se repérer, la Fig.387 présente le coffret entièrement terminé, en favorisant la face avant et le clavier de pilotage. On retrouve en 2, 3 et 7 les LEDs déjà mentionnées ainsi qu’en 8 l’interrupteur INV. Bien visible en 9 se trouve à gauche (Pour les droitiers !) le gros bouton du codeur rotatif. Sur la face  avant en 10 se trouve la LED rouge pilotée par A0 qui signale que le mode APPRENTISSAGE est actif. Importante en exploitation cette LED n’est pas coupée par 8. Le clavier étant disposé à droite, on reconnait en 11 la LED triple pilotée par les sorties A1, A2 et A3 et en 12 celle jaune qui impose de sortir d’une fonction par la touche FIN. En 13 la LED rouge prévient d’une situation potentiellement dangereuse pour JEKERT et en 14 la LED bleue qui précise que le mode MOUVEMENTS est en cours. Les touches bleues auront dans ce cas un effet sur les déplacements du petit robot. Nous verrons plus loin que l’alimentation en énergie utilise trois sources distinctes. Les deux cartes NANO Arduino sont alimentées par un petit bloc 5Vcc. La mise en marche des deux cartes électroniques se fait par l’inverseur 18. Indépendamment des microcontrôleurs, la motorisation est alimentées par deux blocs accumulateurs de 6Vcc pouvant être mis en fonction par les inverseurs 15 et 16. Nous y reviendrons. En 17 deux LEDs blanches témoigneront de la mise en recharge des accumulateurs de puissance, cette dernière étant indépendante pour chaque bloc énergétique.
avant en 10 se trouve la LED rouge pilotée par A0 qui signale que le mode APPRENTISSAGE est actif. Importante en exploitation cette LED n’est pas coupée par 8. Le clavier étant disposé à droite, on reconnait en 11 la LED triple pilotée par les sorties A1, A2 et A3 et en 12 celle jaune qui impose de sortir d’une fonction par la touche FIN. En 13 la LED rouge prévient d’une situation potentiellement dangereuse pour JEKERT et en 14 la LED bleue qui précise que le mode MOUVEMENTS est en cours. Les touches bleues auront dans ce cas un effet sur les déplacements du petit robot. Nous verrons plus loin que l’alimentation en énergie utilise trois sources distinctes. Les deux cartes NANO Arduino sont alimentées par un petit bloc 5Vcc. La mise en marche des deux cartes électroniques se fait par l’inverseur 18. Indépendamment des microcontrôleurs, la motorisation est alimentées par deux blocs accumulateurs de 6Vcc pouvant être mis en fonction par les inverseurs 15 et 16. Nous y reviendrons. En 17 deux LEDs blanches témoigneront de la mise en recharge des accumulateurs de puissance, cette dernière étant indépendante pour chaque bloc énergétique.
Souder les composants sur le petit circuit imprimé.
 Quelques petits détails technique ne peuvent que vous faciliter la tâche. En particulier, (Je ne pense pas l’avoir précisé dans les didacticiels précédents.) un circuit imprimé qui a été stocké sur une longue période s’oxyde. La couleur rouge du cuivre change légèrement de teinte et ce n’est pas évident du tout. Cette minuscule couche d’oxyde constitue l’ennemi numéro un du soudage. L’étain refuse d’adhérer proprement sur la piste cuivrée. On doit insister, ce qui surchauffe les composants. On fait un « gros paquet » pour au final aboutir à ce que les électroniciens nomment une soudure sèche. Pourtant, éliminer ce problème est enfantin. Quand une éponge artificielle a trop souffert, elle commence à se désagréger et part en petits morceaux lors de son usage. Vous en séparez le « gratte avec le dos » et vous obtenez l’outil idéal de la Fig.388 qui frotté avec énergie sur les pistes cuivrées en modifie l’apparence sans pour autant en diminuer l’épaisseur du métal rouge. Devenues plus brillantes, les soudures seront faciles à soigner et mouilleront parfaitement le cuivre et la queue du composant assemblé.
Quelques petits détails technique ne peuvent que vous faciliter la tâche. En particulier, (Je ne pense pas l’avoir précisé dans les didacticiels précédents.) un circuit imprimé qui a été stocké sur une longue période s’oxyde. La couleur rouge du cuivre change légèrement de teinte et ce n’est pas évident du tout. Cette minuscule couche d’oxyde constitue l’ennemi numéro un du soudage. L’étain refuse d’adhérer proprement sur la piste cuivrée. On doit insister, ce qui surchauffe les composants. On fait un « gros paquet » pour au final aboutir à ce que les électroniciens nomment une soudure sèche. Pourtant, éliminer ce problème est enfantin. Quand une éponge artificielle a trop souffert, elle commence à se désagréger et part en petits morceaux lors de son usage. Vous en séparez le « gratte avec le dos » et vous obtenez l’outil idéal de la Fig.388 qui frotté avec énergie sur les pistes cuivrées en modifie l’apparence sans pour autant en diminuer l’épaisseur du métal rouge. Devenues plus brillantes, les soudures seront faciles à soigner et mouilleront parfaitement le cuivre et la queue du composant assemblé.
Notez au passage que le fil d’étain de la soudure mise à contribution s’oxyde également. Si vous le frottez fortement avant de vous en servir, les dépôts de résine sur la plaque cuivrée seront bien plus propres. Pour ma part, je commence par dérouler environ 80cm de soudure de la bobine. Puis je frotte tout le long pour enlever la pellicule périphérique. On peut alors passer au soudage. Quand tous les composants sont soudés sur la petite carte, on peut déjà la tester puisque la liaison vers l’afficheur OLED est sur connecteur HE14. Reliez cette dernière au connecteur de l’afficheur avec des fils d’expérimentation. Alimentez avec la mini prise USB. L’écran d’accueil doit s’afficher normalement. OUF, c’est bon signe. Nous allons provisoirement en rester là pour l’instant, nous verrons comment souder les torons de liaison au moment de l’intégration. Expliciter les différentes liaisons sera plus pertinent quand tous les circuits imprimés seront entièrement définis.
La suite est ici.


