Contenu de Mike118
Il y a 24 élément(s) pour Mike118 (recherche limitée depuis 29-mai 13)
Par type de contenu
Plus de filtres

0) Introduction : Premier Billet du Blog dédié à Robil mon robot pilotable par internet !Introduction
Voici le premier billet du blog dédié à la création de ce petit robot pilotable à distance, projet réalisé avec pascal ( voir le robot de pascal alias serveurperso ) au travers du projet Vigibot de Vigirobotics! Au delà du design de ce petit robot, j'ai travaillé afin de le rendre... |
|

|
|
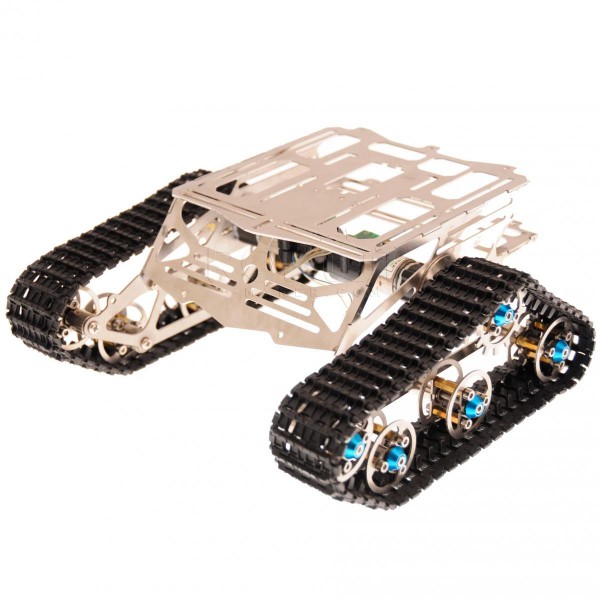
I) Structure générale du châssisL'idée générale:
Les contraintes que je me suis donné pour ce châssis sont : => Facilement réalisable, peu coûteux. => Facile à monter et démonter => Modulaire => Le lidar qui passe juste au dessus des roues => Une taille réduite d'envrion 20... |
|
|
|
Qu'est ce que Robot Maker ?Robot Maker est votre spécialiste robotique francophone sur internet qui s'adresse aux particuliers comme aux professionnels et aux collectivités en regroupant:
Un forum très actif qui vous permet de poser vos questions et d'avoir rapidement des réponses. Une boutique en ligne qui vous permet de trouver tous... |
|
|
|

Vous êtes Nouveau sur Robot Maker ?Nous vous souhaitons la bienvenue sur Robot Maker cependant à cause de trop nombreux SPAM nous sommes contraint de valider manuellement les inscriptions sur le forum. Donc merci de nous envoyer un email à contact@robot-maker.com après avoir crée votre compte.
Vous vous demandez par où commencer ? Alors venez lire ce bille... |
|
|
|
Mon premier robot, Rmad le robot fou!Mon premier "robot mobile", RMAD le robot fou,
Ce robot est nommé ainsi pour deux raisons : R obot M obile A sservis en D istance et à cause de son comportement foufou la première fois où je l'ai lancé ... Il n'était pas encore bien réglé et est parti dans tous les sens ... Le principe du r... |
|
|
|
La liste des réalisations de Mike118Voici quelques un des projets que j'ai réalisé :
RMAD le robot fou , robot suiveur de mur full analogique (CPGE) Bras asservis en position, asservissement full analogique Robots pour la coupe de France de robotique 2013, thème Anniversaire (équipe ESTIA SYSTEM) Robot pilotable par bluetooth... |
|
|
|
Modification de mon skateboard motorisé Airwheel M3Je vis en ville, très près de mon boulot, et pas loin de la poste où je fais souvent des allers-retours.
De tel sorte que la plupart de mes déplacements je les faisais à pied! Un jour je me suis dit que je pouvait réduire ce temps de trajet ( 10 min ) à environ 2 min en utilisant un moyen motorisé électrique. P... |
|
|
|
0) Présentation du projet :Afin d'aider un de nos compatriote du forum je me lance dans la réalisation d'un petit robot télécommandé ! =)
Afin de joindre l'utile à l'agréable, je vais présenter les différentes étapes de la réflexion de ce petit robot dans ce blog. 1) Choix du principe de pilotage => La radio comman... |
|
|
|
1) Choix de la télécommande sans filIl existe de nombreuses façon de piloter un robot,
bluetooth avec smartphone, IR avec télécommande TV Wifi avec un linux embarqué RC comme tout modèle de modélisme Liste des avantages et des inconvénients : Pour ce projet nous choisirons la radiocommande RC... |
|
|
|
2) Comment utiliser la Radiocommande pour piloter notre robot ?Maintenant que nous avons choisis d'utiliser une radiocommande :
Ici nous allons parler des techniques de lecture des signaux d'une radiocommande RC de modélisme avec Arduino . Nous avons déjà rédigé un tutoriel très simple expliquant la méthode " facile" pour lire les signaux d'u... |
|
|
|
0) Présentation du projet BRIELIntroduction :
BRIEL : Biped Robot for Interactive Experimentation and Learning Il s'agit de la réalisation d'un robot bipède afin d'expérimenter les problématiques lié à ce genre de Robot. L'ensemble des produits utilisés sur ce projet seront disponible sur la boutique... |
|
|
|
1) Choix de la structure de BRIELContraintes
Utilise des servomoteurs bas de gamme / économique => Les MG995 et voir leur limites http://www.robot-mak...erpro-mg995.jpg Avoir un bipède avec suffisamment de degrés de liberté ( on notera DOF => Degrees Of Freedom / degrès de libert... |
|
|
|
2) L'électronique de BRIELRapides calculs :
On est partit sur l'utilisation de 10 servomoteurs MG995 et d'après la doc chaque MG995 est alimenté en 5V peut consommer au maximum environ 1,45 A au couple max... On a 10 servomoteurs => 10 * 1,45 A = 14,5 A au maximum ... Soit environ 72,5 W max ( 14,5 A* 5 V) ce qui n'est pas rien Auquel... |
|
|
|
3) BRIEL : Calibration des servomoteurs et montage de la première jambeMaintenant que l'électronique est prête, avant d'assembler votre bipède il vous faudra calibrer les valeurs pour chacun de vos servomoteurs.
Pour cela on va commencer par calibrer les 5 servomoteurs pour tester la première jambe complète. Puisqu'on utilise un driver de servomoteur pour piloter... |
|
|
|
4) BRIEL : Tests sur une Jambe !Avant de faire du code pour pouvoir bouger la Jambe de Briel dans tous les sens il faut faire attention aux angles MIN et MAX de débattement !
Pour cela on va utiliser ce code : //Bibliothèques :#include <Wire.h>#include <Adafruit_PWMServoDriver.h>#define NBSERVO 5//Driver :Adafruit_PWMServoDriver... |
|
|
|
Robot Suiveur de signature thermiqueCe robot a été réalisé en 2015 dans le cadre de mon master de spécialisation en robotique et systèmes embarqués réalisé au sein de l'université de Salford à Manchester. Il utilise comme capteur principal une caméra thermique 16 pixel 4*4 Omron D6T MEMS Thermal... |
|
|
|
Asservissement en position d'un moteur à courant continu de manière analogiqueProjet de bras asservis en position réalisé en 2012.
Vidéo de présentation : Explications: L'asservissement du moteur à courant continu est réalisé en tout analogique avec des amplificateurs opérationnels. L'asservissement est... |
|
|
|
Présentation du projet de robot d'exploration à chenille.Ce projet est réalisé suite à une demande de client.
Il s'agit d'un robot d'exploration piloté par une radiocommande de modélisme. Ce robot doit naviguer dans des canalisations de diamètre > 250 mm et emporte une caméra. Première esquisse du projet : Sp... |
|
|
|
Structure du robotPhoto du char original servant de base pour le projet :
http://www.robot-maker.com/shop/26-large_default/chenille-encodeurs.jpg Le char a été démonté afin de récupérer les deux ensembles de chenilles et leur moteur intégré. Les chenilles : Voici la pièce imp... |
|
|
|
Tourelle Pan Tilt avec MG995Une tourelle "pan tilt" vient équiper le robot d'inspection :
On parle de tourelle pan tilt afin de décrire une tourelle à deux axes de rotation motorisés un des axes permettant de regarder de droite à gauche, c'est l'axe "Pan" aussi appelé axe de lacet. un des axes permettant de regarder de bas en haut, c'... |
|
|
|
L'électronique du robot d'explorationL'ensemble de l'électronique est assemblé en un bloc composé de deux plaques imprimées en 3D et séparées par des entretoises en plastique :
Modélisation : L'ensemble contient : Un arduino nano sur son shield. Un driver pour 2 moteurs L9110 . htt... |
|
|
|
Impression et assemblage du robotLes pièces du châssis imprimées en 3D
Le châssis est composé de seulement 4 pièces: Il aura fallu 30h d'impression pour ces 4 pièces. Des écrous métalliques ont été inséré pendant l'impression du châssis. Pour cela l'imprimante l'a été configurée... |
|
|
|
0) Le principe du robotMinus V0 est un premier prototype de robot Raspberry Pi simple pour montrer le potentiel du système de pilotage de robot Vigibot de Vigirobotics
Le but est de montrer un exemple possible, facile à réaliser. Voici une photo du résultat du premier prototype : Contenu du robot : Ch... |
|
|
|
1) Le châssis du robotLe châssis du robot est imprimé en 3D.
Il permet de relier mécaniquement deux servo moteurs 360° à la carte raspberry pi. Le châssis est plutôt simple : Deux empreintes adaptées aux servomoteur 9g à rotation 360... |
|
|





{kind=link}
{kind=link}