Chapitre consacré à la réalisation du lecteur de « cartes perforées », nous allons détailler les techniques employées pour relever le double défi annoncé dans le chapitre précédent, sans oublier de passer en revue les nombreux autres aspects de cette phase particulièrement importante dans la création de notre prototype. Nous allons commencer par le premier chalenge relatif aux efforts qui s’exercent dans cette unité, actions mécaniques internes qui en influencent directement la conception globale des éléments principaux.
♦ Contraintes mécaniques engendrées par les palpeurs.
Mécaniques de précision, les frêles capteurs avec palpeurs télescopiques n’imposent qu’une faible sollicitation pour les comprimer d’environ 4mm lorsque le lecteur est fermé et verrouillé. La Fig.8 en précise les dimensions, ce sont vraiment des petites pièces d’horlogerie.
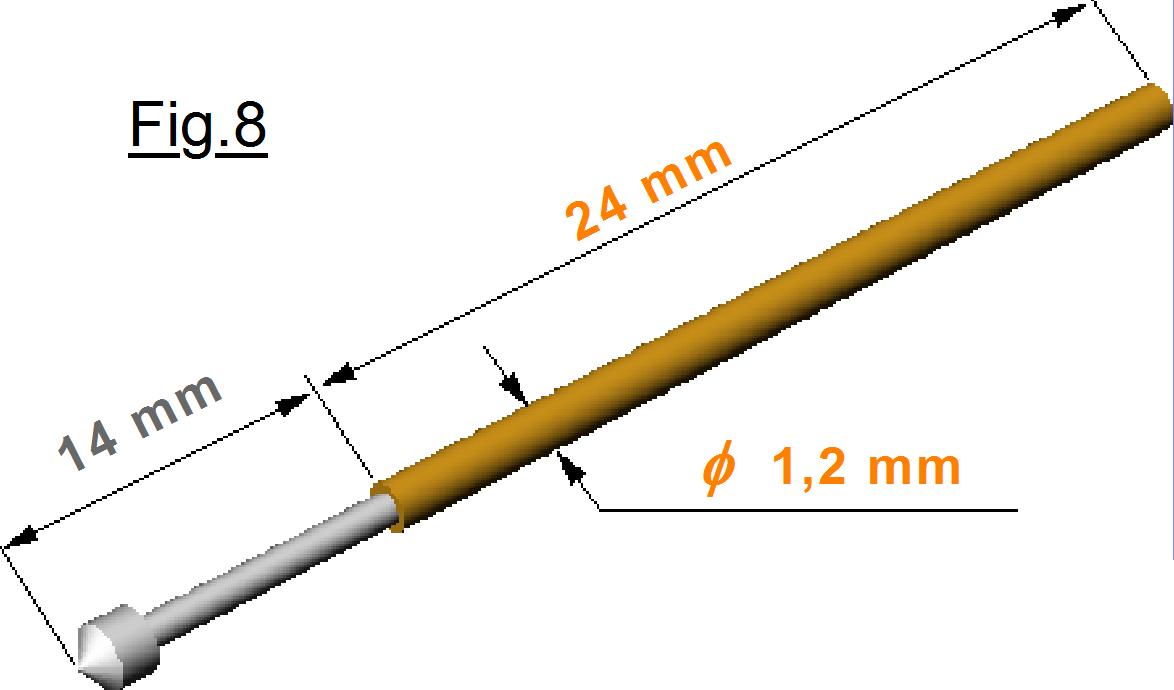
Une mesure montre que l’effort à fournir dans ces conditions avoisine 62 « Grammes Force ». (Que les spécialistes acceptent la non utilisation du Newton, unité légale trop ignorée par le grand public.) C’est un effort assez dérisoire facile à exercer manuellement quand tenu à la main on pousse dans l’axe sur l’extrémité du palpeur. Mais, c’est bien connu, l’union fait la force. Quand on désire avancer la Contre-matrice vers les circuits imprimés des capteurs, c’est une troupe de 561 palpeurs qu’il faut rétracter. Un rapide calcul élémentaire prédit que l’effort total à exercer sur le système sera de 62 x 561 = 34782 grammes, soit la bagatelle de 34,8 Kg Force. (Soit environ 341 N.) Autant dire que le pouce ne suffit plus, et qu’il faut prévoir un dispositif d’amplification de l’effort humain efficace pour ramener la force à exercer à une valeur très raisonnable. Par ailleurs, cet effort va se retrouver sur les circuits imprimés supportant les palpeurs, sur la Contre-Matrice et sur le corps du lecteur de feuilles de programme. Il faut impérativement rigidifier tous ces organes vitaux de la machine.
♦ Contraintes de conception de la MATRICE de palpeurs.
Concilier l’inconciliable serait un titre plus approprié, car les incompatibilités sont nombreuses, et il importe de faire appel à un compromis qui optimise au mieux les divers critères qu’il faudrait respecter pour aboutir à une solution raisonnable. Nous allons détailler dans la suite de ce tutoriel les solutions envisagées et les techniques mises en œuvre pour les concrétiser.
♦ Conception de la matrice de palpeurs.
Étudiée pour réduire au maximum les dimensions de la machine et utiliser au mieux la surface d’une feuille de programme au format A4, l’usage de circuits imprimés prépercés du commerce prévus pour le prototypage facilite considérablement la réalisation, car le circuit imprimé est directement utilisable et les trous déjà percés avec une précision « industrielle ». La répartition des palpeurs se fait dans un quadrillage de 2,54mm. (1/10 ième de pouce.) Les contraintes de conception sont nombreuses, et la Matrice de palpeurs est étudiée pour obtenir une rigueur de perpendicularité des 561 aiguilles par rapport à la Contre matrice, c’est à dire la plaque cuivrée sur laquelle s’établissent les contacts électriques à travers la feuille des transitions. Il faut donc aboutir à une perpendicularité la plus rigoureuse possible entre les palpeurs et les circuits imprimés. Dans ce but le lecteur de
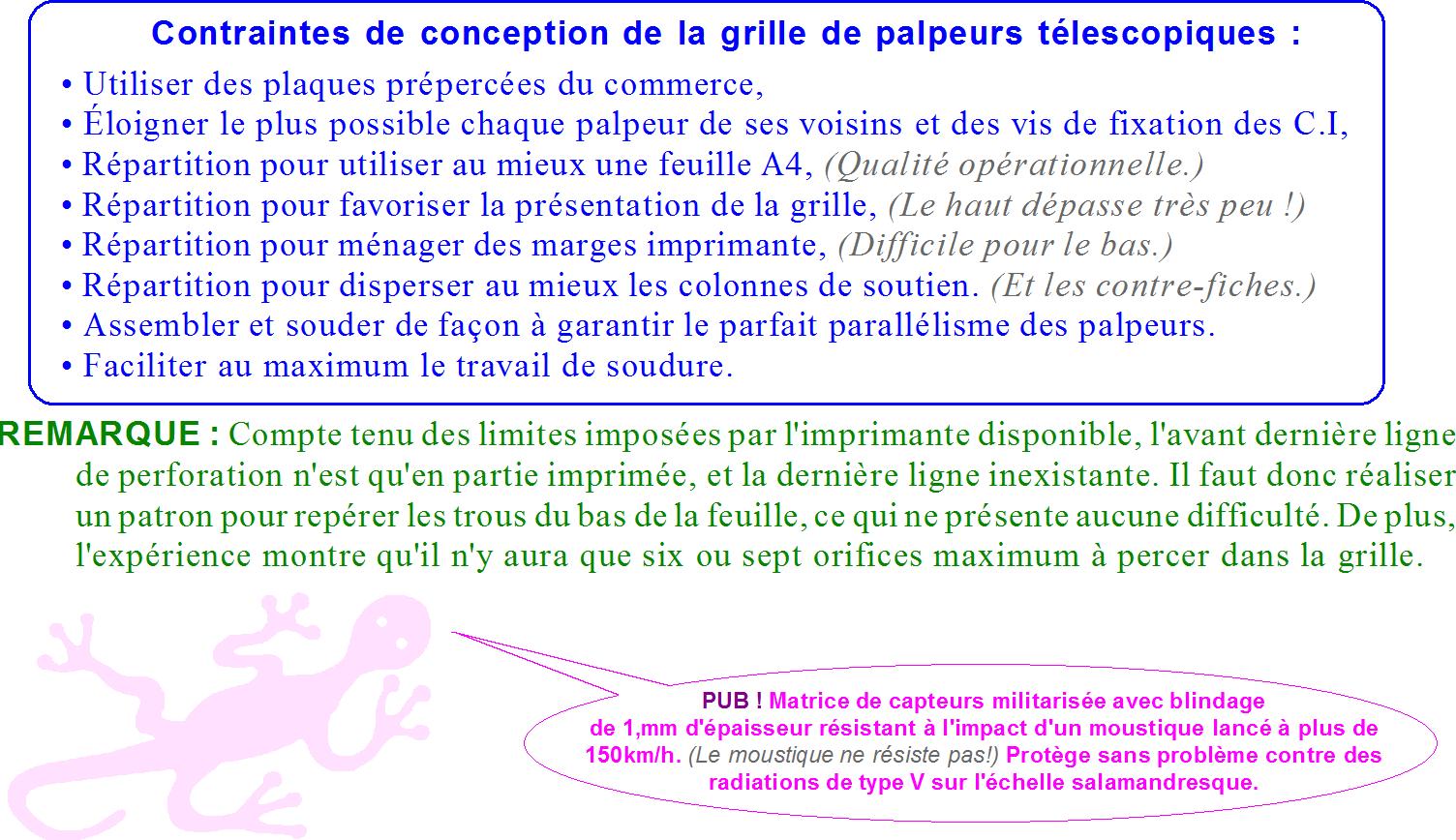
feuilles de programme est globalement architecturé comme présenté sur la Fig.9 avec les palpeurs 1 dont le corps 3 est maintenus par la plaque d’Altuglas 5 qui sont soudés en A sur le circuit imprimé 4. Pour assurer la perpendicularité entre 3 et 4 le corps 3 des palpeurs télescopiques traverse la plaque d’Altuglas 5 distante de 4 de 6mm par l’entremise des entretoises en nylon 6. Les vis 2 et leurs rondelles d’appui immobilisent 4 sur les entretoises hexagonales 7 qui sont également en matériau de type nylon. Ces entretoises 7 sont immobilisées sur le dos de la structure 10 par les vis et leurs rondelles d’appui 9. Les entretoises d’écartement 7 ont une longueur suffisante pour souder en C les diodes 8 en laissant un espace suffisant avec 10.
♦ La propagation des efforts.
Pour rétracter un palpeur d’environ 2mm à 3mm il suffit d’une pression que l’on peut qualifier de dérisoire. (62g force à 65g force environ comme déjà précisé dans le chapitre précédent.) C’est la poussée qui sera engendrée par 3 sur le circuit imprimé 4, largement supportée par ce dernier et par la soudure A. Nous avons vu qu’il en va tout autrement quand on multiplie ce « dérisoire » par 561. En effet, la pression engendrée par l’ensemble des capteurs sur les trois circuits imprimés 4 totalise environ 34,8kg force à 36kg force. (Oui, je sais que les puristes vont me reprocher de ne pas écrire 341N à 353N, mais je préfère ici un « langage » très approximatif acceptés par tous au détriment de la rigueur …) Cette poussée globale est considérable et engendre des déformations de la structure et de la Contre matrice qu’il faudra absolument contrer par des raidisseurs. En résumé, 4 pousse sur 5 en B. L’entretoise 5 à son tour agit sur 7 en D. Enfin, D pousse sur 10 en E. Ces efforts se propagent intégralement sur 10, en remarquant que sur chaque entretoise la « force » totale reste modérée car divisée par le nombre de 55 colonnes hexagonales qui sont réparties sur la surface de la grille des palpeurs. Réalisées en matériau de type « nylon », les entretoises 7 résistent mal au cisaillement, c’est à dire à l’arrachement des filets des taraudages. C’est sans importance, car les vis 2 et 9 peuvent se voir implanter avec un serrage très modéré car elles ne sont absolument pas sollicitées en traction, les colonnes étant comprimées et non tendues.
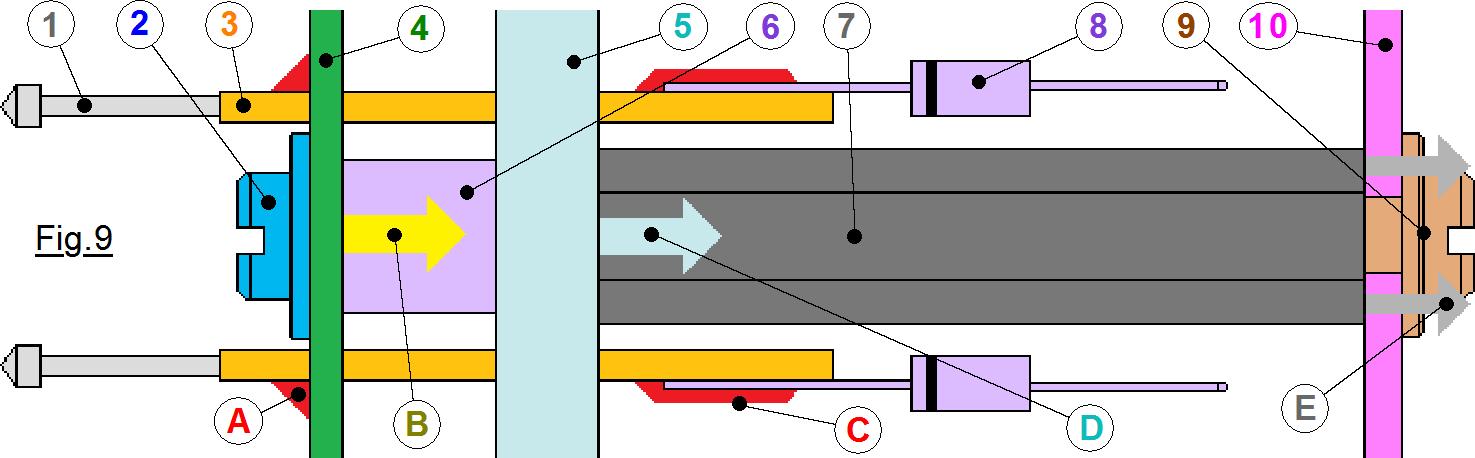
Toujours sous forme de maquette virtuelle cachée dans les entrailles de l’ordinateur, la Fig.10 présente le module complet de la MATRICE de capteurs formant un sous-ensemble constitué de la plaque en d’Altuglas 5 assemblée rigidement sur la structure métallique 10 non représentée du corps vertical du lecteur de feuilles de programme. (La Fig.10 reprend les repères de la Fig.9) Cette plaque est rendue solidaire par les quarante neuf entretoises 7. Trouver un circuit imprimé de format A4 prépercé n’est pas vraiment réaliste. Aussi, c’est trois plaques cuivrées bien rigides qui constituent le support des palpeurs. Ces trois plaques sont assemblées de façon « robuste » sur d’Altuglas 5 par les vis 2 et les entretoises en nylon 6 dont deux sont discernables sur ce dessin.
La Fig.11 également fournie par le monde virtuel des ordinateurs présente l’allure globale du corps de la structure du lecteur des cartes perforées. Sur ce dessin l’ensemble du corps est colorié en bleu pastel, et la
plaque rigide du fond 10 en rose. En vert pastel sont mis en évidence les profilés qui servent à guider en translation rectiligne la structure de la Contre-Matrice dont il sera question plus avant. La grosse flèche violette montre la façon dont l’ensemble de la Fig.9 est assemblé en liaisons rigides sur la plaque verticale du fond 10.
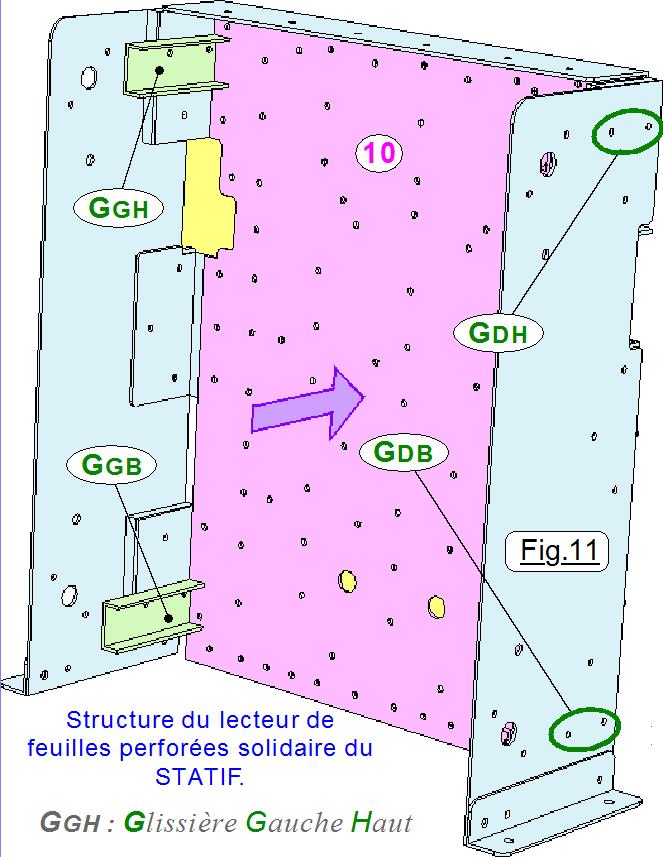
Les deux trous circulaire et la lumière jaunes servent à faire transiter vers l’arrière les innombrables liaisons entre les diodes, le circuit imprimé de la Contre-Matrice avec les prises DB25 non visibles sur le dessin et immobilisées sur les profilés de renfort et de rigidification disposés au dos de la plaque 10. Maintenant que nous avons une idée relativement précise de l’agencement de la MATRICE et de la structure globale de cette unité, nous pouvons passer à l’aspect réalisation. Dans ce but consultez le fichier RÉALISER.pdf très documenté …
La suite est ici: Conception de la contre matrice de notre machine de Turing.


