Optimisé pour répartir le plus judicieusement possible l’effort de 34,8KgF nécessaire au verrouillage du LECTEUR de cartes perforées, le dispositif adopté met en œuvre six leviers bien visibles sur la photographie de la Fig.2 et regroupés mécaniquement par trois pour former deux poignées indépendantes l’une articulée en bas, l’autre en haut de la structure. Morphologiquement, ces leviers comportent diverses zones fonctionnelles repérées par des couleurs sur la Fig.14 représentée en respectant les proportions de cette pièce. Compte tenu de leurs formes spécifiques, ces pièces sont moulées en fils de PLA sur une imprimante 3D. Naturellement ce didacticiel est accompagné des fichiers gco pour que vous puissiez facilement réaliser des clones. (Le PLA utilisé est un matériau « écologique » qui présente une résistance mécanique largement suffisante.) En C on trouve le corps longitudinal du levier terminé en B et en D par des manchons assurant la rigidité indispensable.
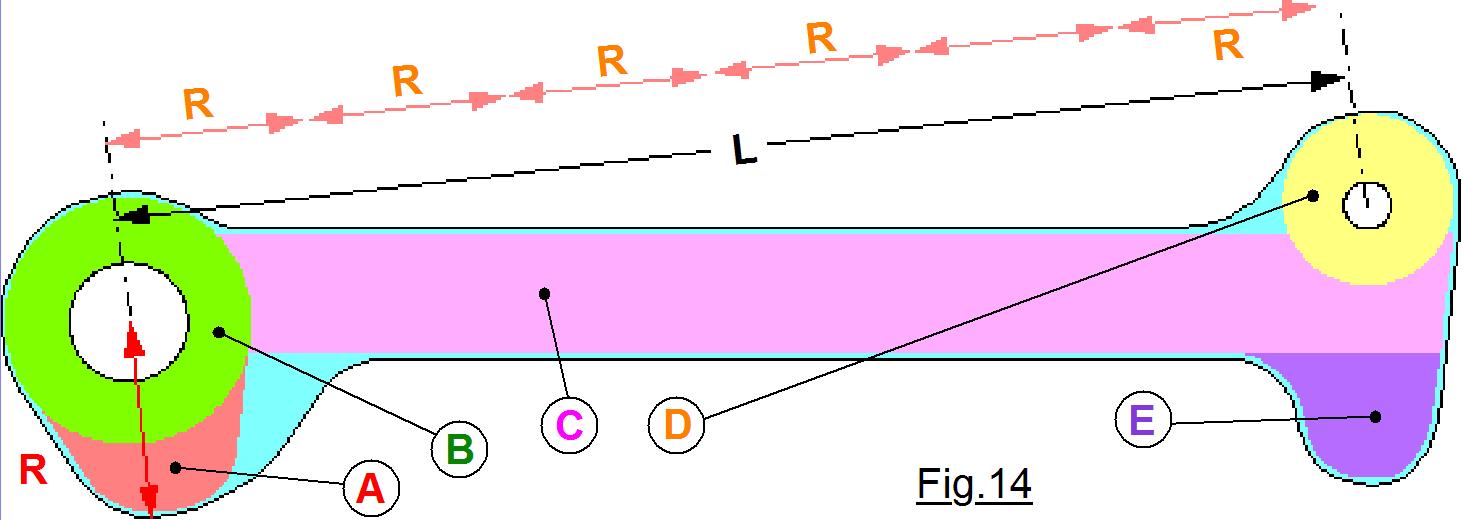
En A se trouve la partie active de la came de verrouillage. Enfin en E le bossage sert de butée sur le dos de la structure en phase verrouillée. On peut vérifier sur ce dessin que le rayon actif R de la came est six fois inférieur à la longueur L du levier. L’amplification d’effort avoisine donc six. L’effort à fournir pour fermer le lecteur par chaque groupement de levier est de 34,8KgF / 2 soit 17,4KgF. La poussée à exercer sur la poignée D sera alors égale à 17,7 / 6 = 2,9 KgF soit environ 28,5 Newtons. Cet effort est très facile à produire.
♦ Fonctionnement du dispositif de verrouillage.
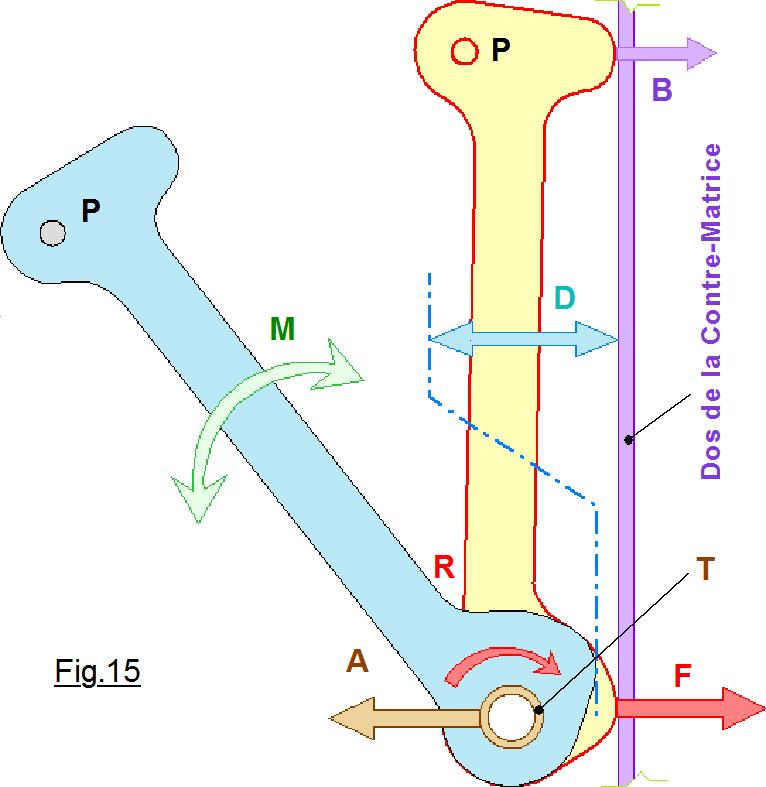 Représenté sur le dessin (Réalisé à l’échelle.) de la Fig.15 il montre le mécanisme en position verrouillée obtenu par la rotation R jusqu’à ce que le levier butte en B. Quand on manipule un groupe de leviers par sa poignée P, un mouvement de grande amplitude M se réduit sur le mécanisme à un débattement D relativement modeste. Cette translation rectiligne de la Contre-Matrice sur le corps du LECTEUR de cartes perforées reste toutefois largement suffisante pour dégager pleinement la feuille, ou rétracter tous les palpeurs d’environ 5mm, assurant un contact électrique franc avec la plaque cuivrée. Quand le système est verrouillé, il y a arc-boutement, c’est à dire que la poussée des 561 palpeurs sur les leviers par l’entremise du dos de la structure ne peut en aucun cas engendrer une rotation inverse des leviers. Quand les leviers exercent la poussée F de 17,4 kilogrammes force sur le dos de la plaque verticale, réciproquement cette dernière engendre l’action mécanique inverse A. Cette poussée non négligeable passe des leviers à la tige centrale T. Cette dernière est retenue par les flancs de la structure à ses extrémités. Sollicitée en son centre et maintenue en place proche de ses extrêmes, cette pièce est fortement sollicitée en flexion. Aussi, pour éviter qu’elle n’accuse une déformation, aussi faible soit-elle, cet arbre d’articulation est débité dans une tige en acier soudé de diamètre 10mm très rigide. Cette barre est maintenue latéralement en place par les chapeaux également moulés avec une imprimante 3D, et visibles en verts sur la Fig.2 de la page 2.
Représenté sur le dessin (Réalisé à l’échelle.) de la Fig.15 il montre le mécanisme en position verrouillée obtenu par la rotation R jusqu’à ce que le levier butte en B. Quand on manipule un groupe de leviers par sa poignée P, un mouvement de grande amplitude M se réduit sur le mécanisme à un débattement D relativement modeste. Cette translation rectiligne de la Contre-Matrice sur le corps du LECTEUR de cartes perforées reste toutefois largement suffisante pour dégager pleinement la feuille, ou rétracter tous les palpeurs d’environ 5mm, assurant un contact électrique franc avec la plaque cuivrée. Quand le système est verrouillé, il y a arc-boutement, c’est à dire que la poussée des 561 palpeurs sur les leviers par l’entremise du dos de la structure ne peut en aucun cas engendrer une rotation inverse des leviers. Quand les leviers exercent la poussée F de 17,4 kilogrammes force sur le dos de la plaque verticale, réciproquement cette dernière engendre l’action mécanique inverse A. Cette poussée non négligeable passe des leviers à la tige centrale T. Cette dernière est retenue par les flancs de la structure à ses extrémités. Sollicitée en son centre et maintenue en place proche de ses extrêmes, cette pièce est fortement sollicitée en flexion. Aussi, pour éviter qu’elle n’accuse une déformation, aussi faible soit-elle, cet arbre d’articulation est débité dans une tige en acier soudé de diamètre 10mm très rigide. Cette barre est maintenue latéralement en place par les chapeaux également moulés avec une imprimante 3D, et visibles en verts sur la Fig.2 de la page 2.
La suite est ici : Conception des 7 octets de la mémoire vive de notre machine de Turing.


