Au passage, bravo pour ton projet, je fais habituellement partie de la masse silencieuse des lecteurs mais c'est l'occasion de le dire

je plussoie

 1 note(s)
1 note(s)
Membre passionné

Posté 24 septembre 2017 - 06:32
La synchronisation RPI <-> Arduino fonctionne maintenant après avoir déplacé le code de traitement du message RPI_READY envoyé par la RPI coté Arduino , de la boucle Setup vers la boucle Loop .
Mais cela ne marche que si l'Arduino a terminé sa sa boucle "Setup"
Reste à faire le test de la mise à jour de l'App Android "Test connection App <-> Arduino"
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 17 octobre 2017 - 11:44
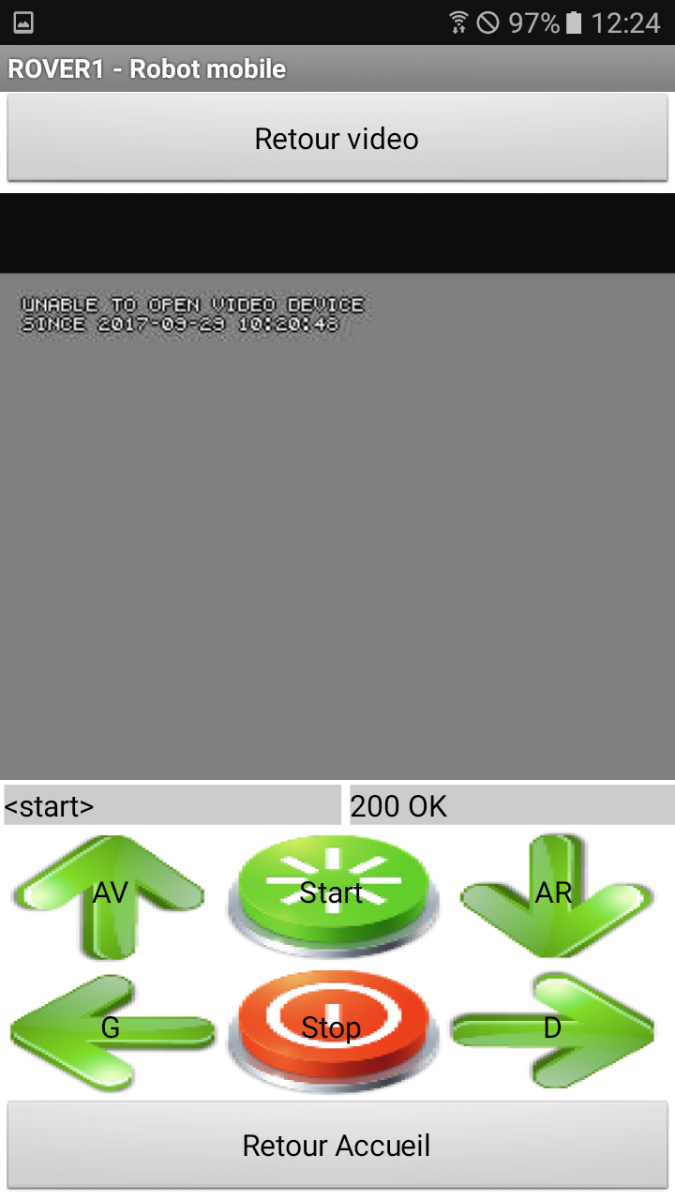
La commande START de l'app Android de controle du robot est opérationnelle après quelques modifs de code coté RPI ( Python) et Arduino.
Une Api Python tourne sur le Rpi pour le traitement des messages entre l'App Android e l'Arduino ( sockets server et client, ...)
Message cmd = <start> affiché dans l'App Android
message Http POST + <start> : App Android -> Rpi
message <rpi_ready> : Rpi -> Arduino
message <arduino_ready> : Arduino -> Rpi
message Http 200 OK : Rpi -> App Android
Message Retour cmd = 200 K affiché dans l'App Android
Screenshot du test ( le retour video ne fonctionne car la webcam n'est plus connectée temporairement au Rpi)
EDIT : Test OK pour la commande STOP avec arret des moteurs par l'Arduino.
Une séquence START -> STOP -> START -> .... fonctionne sans blocage de l'interface de commande du robot
=> Reste à tester les commandes restantes AV , AR , D , G
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 20 octobre 2017 - 11:24
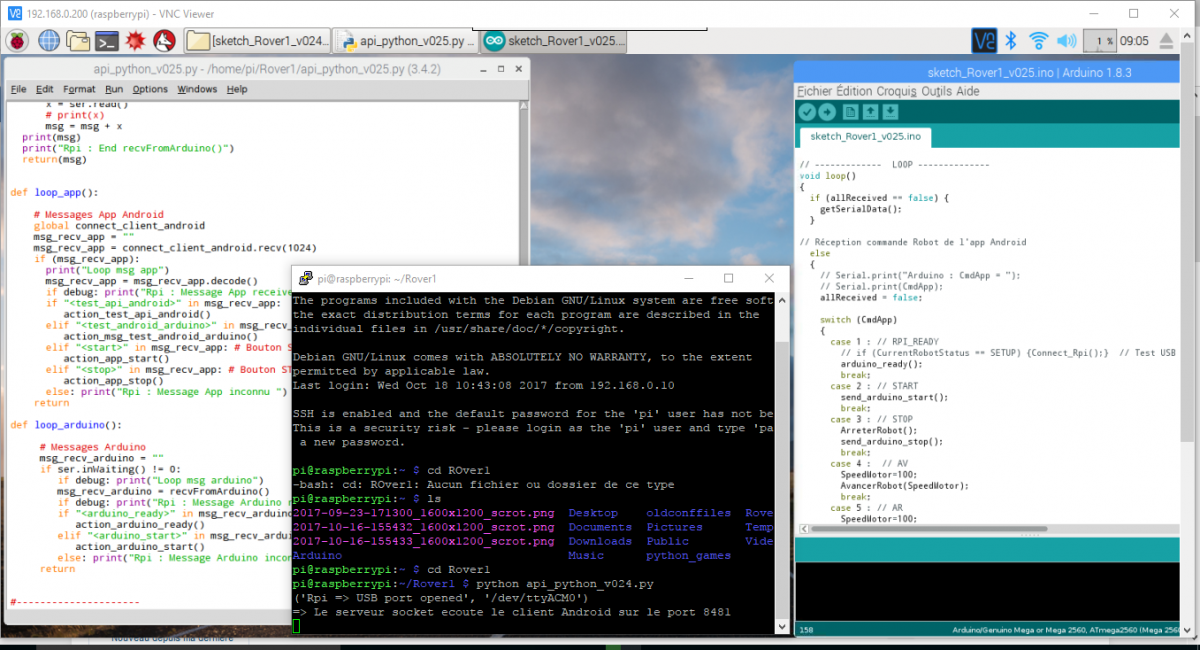
Mon environnement de développement est installé entièrement sur le Rpi3 + VNC Server et est utilisé à partir d'un PC connecté en Wifi en tant que client VNC :
- Python
- IDE Arduino
- Console RPI en SSH ( Putty)
Cela permets , sur le meme écran du PC d'avoir accès dans la fenètre VNC Client aux :
- Code source Python interprété
- Code source Arduino dans son IDE pour compilation et téléversement
- A la console Rpi pour éxécution du code Python et Debug
+ MIT Inventor 2 dans Firefox pour l'App Android
NB : J'ai pour objectif final de pouvoir travailler sur mon robot de surveillance à distance ( comme le Rover Curiosity de la Nasa .... humblement )
Cf screenshot
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 04 novembre 2017 - 03:43
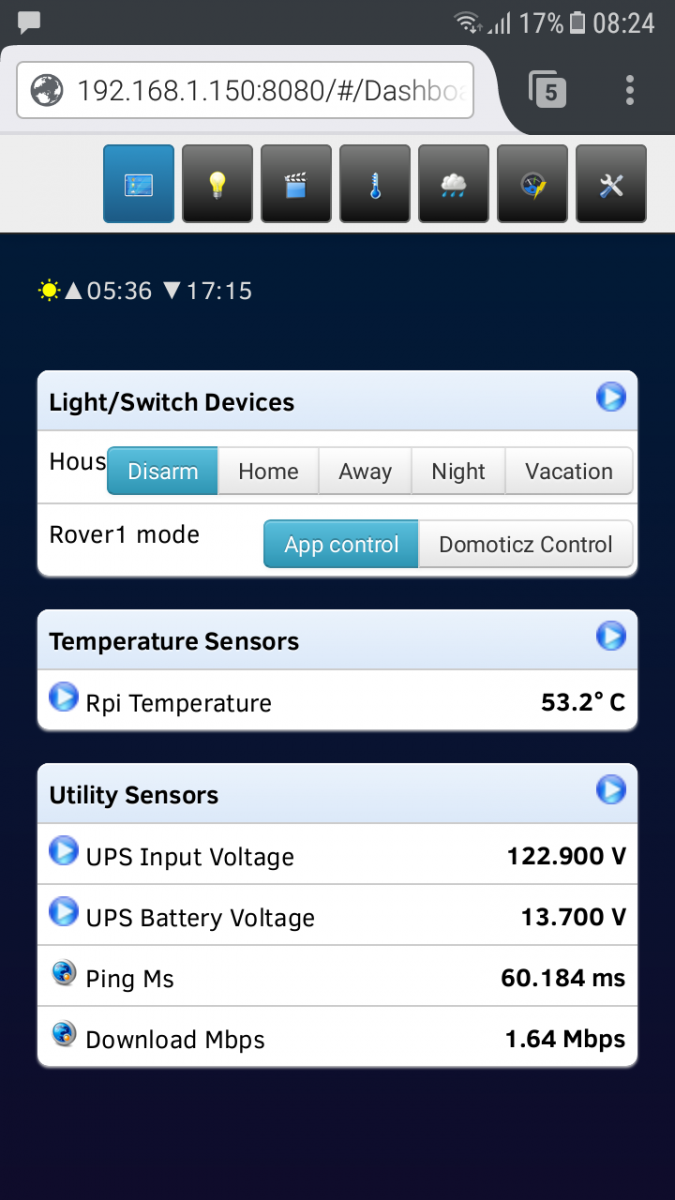
Bon avant de terminer les boutons AV,AR,D,G de commande du robot .... et se changer les esprits , je me suis penché sur l'intégration du robot avec mon logiciel domotique "DOMOTICZ" sur RPI3 :
- Un switch selector "House Mode" avec des actions définies en fonction de l'état de ma présence dans la maison DISARM , HOME , AWAY , NIGHT , VACATION
- un switch selecr "Rover1 mode" pour indiquer au logiciel Domiicz de controler ou pas le robot.
En conclusion , le robot sera controlé par l'app Android si House Mode = Disarm et Rover1 = App Control
Pour rappel , sur évènement de détection de mouvement le logiciel domotique va donner les instructions au robot pour aller dans la zone du détecteur de mouvement qui a été actionné
Le dashboard de "Domoticz" montrant l'interface avec le robot
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 10 novembre 2017 - 03:15
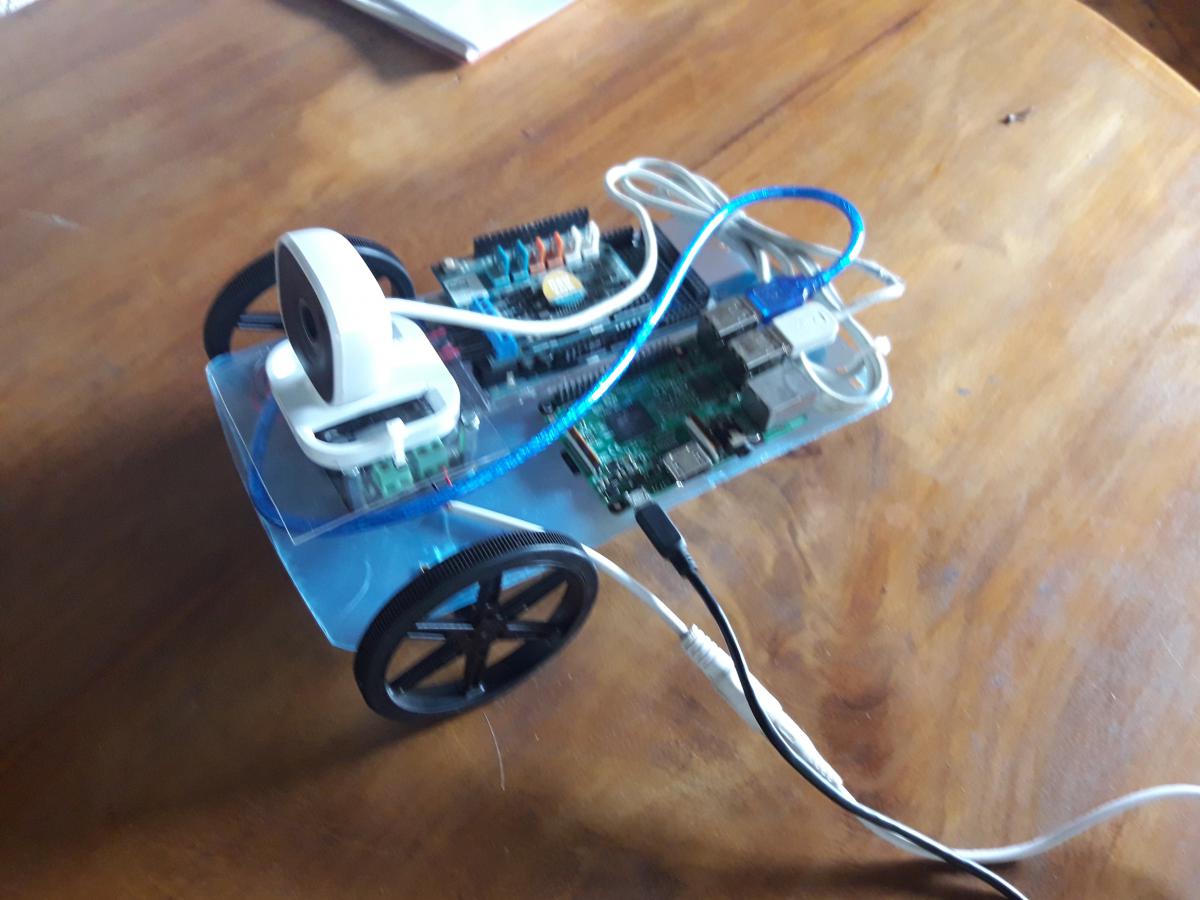
Un nouveau chassis de test ( 2 roues avec motoréducteurs + 1 rue folle) a été réalisé pour y installer une alim 5V A , une carte Arduino MEGA avec au-dessus son shield moteur Arduino, une carte RPI3 et une webcam USB . ..... pas facile d'etre maquettiste !
Pour l'instant pas de batterie mais un chargeur 5V 2A pour le RPI et un chargeur 12V 1A pour la carte alim en attendant un modèle plus puissant car il alimente les 2 cartes Arduino.
Cette phase de test va ( enfin ) consister à piloter le robot à partir de l'app Android ( AV , AR , D , G , STOP ) et avec le retour video sur l'app Android.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Membre passionné
Posté 10 novembre 2017 - 11:18
Effectivement la structure du chassis en tubes PVC a été abandonnée car c'est assez difficile pour réaliser des angles sur chassis de petite taille .
Pour le chassis final , je vais certainement m'orienter vers une structure en profilé comme toi et certains des Makers à ce que j'ai pu voir sur le forum.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Pilier du forum

Posté 11 novembre 2017 - 08:18
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné

Posté 11 novembre 2017 - 10:52
Pilier du forum
Posté 11 novembre 2017 - 02:03
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 12 novembre 2017 - 12:50
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Pilier du forum
Posté 12 novembre 2017 - 07:59
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum

Posté 13 novembre 2017 - 10:37
Oracid, Il existe des profilés alu de plus grosse section de ceux de ta machine mais bien plus léger.
En France, il est très difficile de trouvé des profilés adapté à la robotique (petite section, léger et résistant),
Les profilés serait peut-être à demander ici.
Membre passionné
Posté 14 novembre 2017 - 07:10
En fonction de la taille/poids du robot , le chassis peut etre réalisé avec des sections de profilés plus ou moins importantes ( 8 x8 mm , , 4x 12mm 8 x 12 mm , 24 x 24 mm ....) , ce que permets Makeblock , cf lien ci-dessous avec les prix correspondants
https://www.lextroni...ofils-beam.html
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Pilier du forum
Posté 14 novembre 2017 - 07:21
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 15 novembre 2017 - 08:53
Ca y est enfin ... les premiers tours de roues de Rover1 , piloté à partir de l'application Android dédiée ( Boutons START , STOP , AV )
=> La vidéo ne peut pas etre ajoutée à ce post ( fichier mp4 ) , avec une erreur du type " pas la permission de télécharger le fichier " !
Comment faire sans passer par youtube ?
Ensuite restera à tester les autres boutons AR , Tourner à Gauche ,Tourner à Droite et à refaire une meilleure vidéo
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/









0 members, 0 guests, 0 anonymous users









