 cest pas les servos les plus pouuris du marché. ^^
cest pas les servos les plus pouuris du marché. ^^

 5 note(s)
5 note(s)
Mes robots web sécurisés avec accès publique !
Débuté par Serveurperso, avril 08 2017 02:43
Robot Node.js Serveur Web UHF Faible latence Radioamateur PIC32 HTML5 H.264
245 réponses à ce sujet
#182

Serveurperso
-
- Membres
-

- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 05 octobre 2017 - 07:27
Punaise je ne comprends pas tout quand tu parles mais il est clair que tu es une sacrée source d inspiration pour moi
lol c'est juste du marmonnage je ne dit quasi rien sur la vidéo
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#183
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 17 octobre 2017 - 06:58
J'ai trouvé une astuce pour les pinces basées sur des servos comme les dynamixels qui exploitent des moteurs à réducteurs réversibles (sans visse sans fin)
Quand on utilise le couple maximum du motoréducteur pour serrer un objet avec la pince le moteur chauffe et dans le cas des dynamixels, la sécurité minimum obligatoire est la protection thermique activée par défaut.
Le servo passe en sécurité et désactive le couple moteur. la canette de boisson tombe et c'est l'echec de la mission lol.
Utiliser des capteurs de pression et un asservissement en pression ne sert a rien dans ce cas : cela ne ferait que diminuer la puissance de serrage. Le but est bien de serrer au maximum possible sans surchauffe.
Pour éviter ce problème il suffit de faire varier le couple afin de serrer l'objet au maximum pendant les variations de la consigne de position, puis quelques instants après, comme pour un mode veille, diminuer en couple de maintien (j'ai mis 1/4 de la puissance max), le moteur est quand même bloqué car il ne peux pas tourner dans l'autre sens et l'objet serré au maximum sans surchauffe ni limite de durée.
Avec 1/4 de couple de maintient il est impossible de forcer contre la consigne par la sortie du réducteur ou si : jusqu’à en casser le train de pignon ! du coup victoire je peux exploiter les servomoteurs au maximum et déplacer n'importe quel objet jusqu’à 500 grammes de façon fiable avec de simples AX-12A.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

#185
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 17 octobre 2017 - 07:39
C'est le cas mais tout en gardant la pince le plus universel possible.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#186
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 novembre 2017 - 08:08
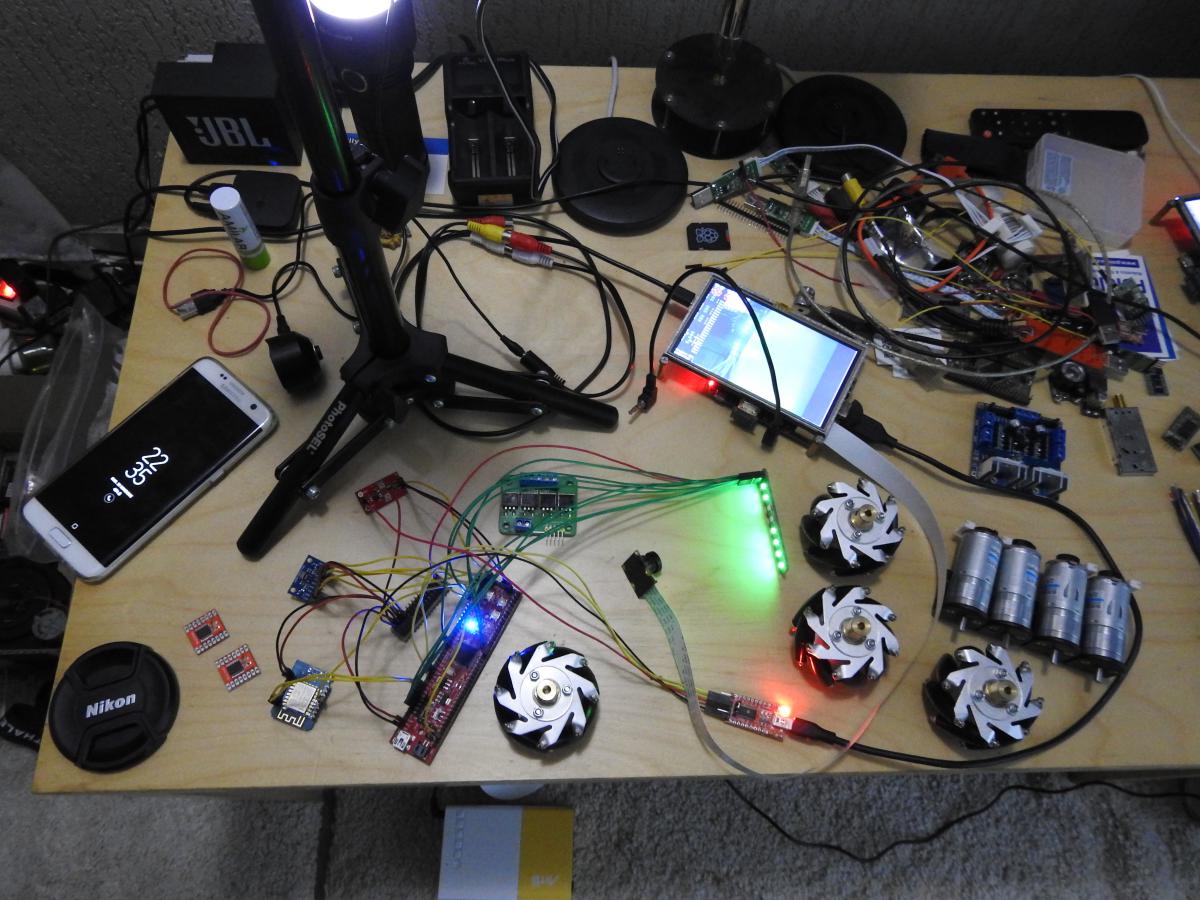
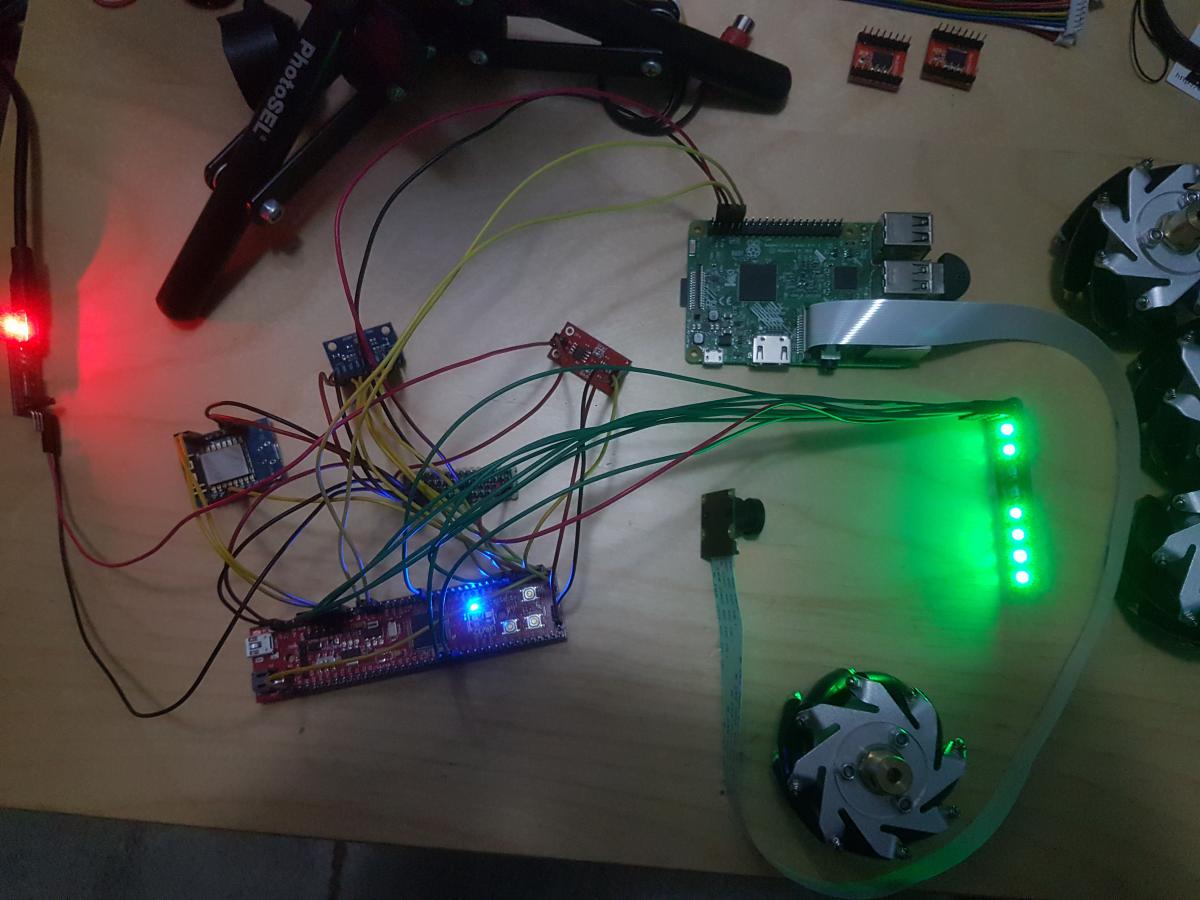
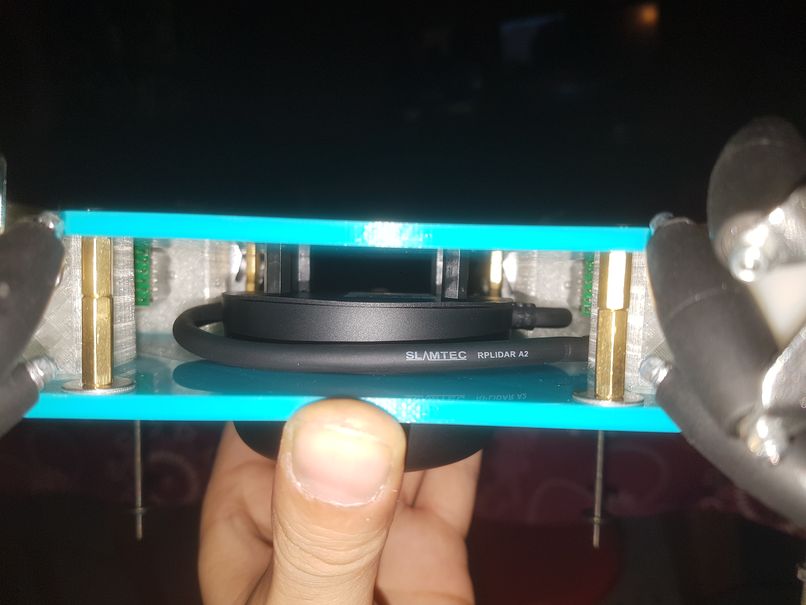
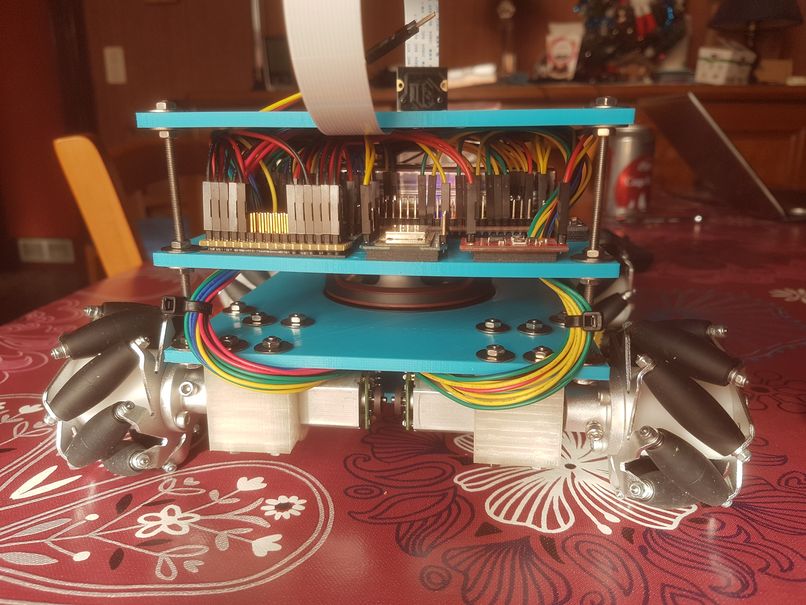
Hop le nouveau robot en train de naître lol.
Celui ci est Wi-Fi et l'interface web est totalement embarquée dessus. Il suffit d'ouvrir un port (en l’occurrence le 8080) pour y avoir accès.
Le next step de développement web c'est qu'il(s) se connecte(nt) à un cloud (serveur relais) pour avoir un truc facile à mettre en service sur n'importe quel accès internet.
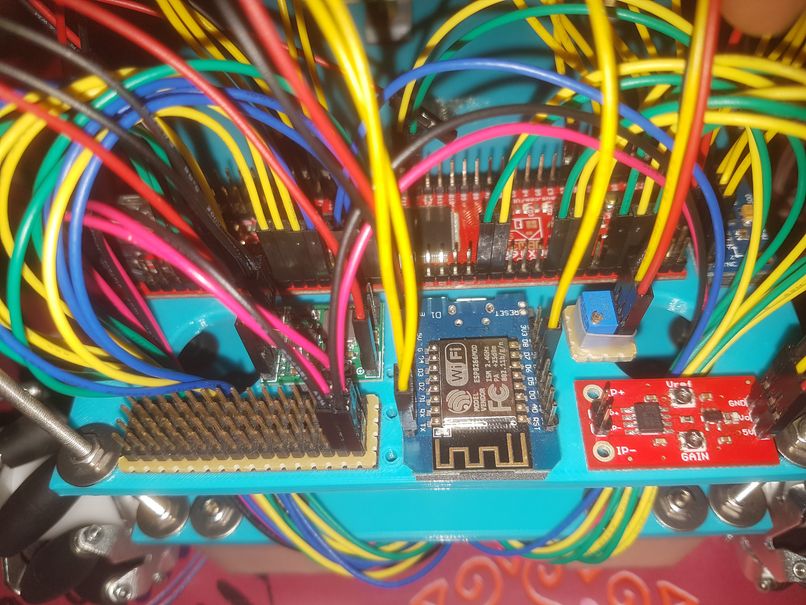
J'attend que le jojo (Mike118) m'envoie le RPLIDAR A2 pour que ça commence à avoir de la gueule ! Pour l'instant ya l'IMU qui fonctionne (gyro du yaw de l'odométrie) et j'ai mis temporairement une barre de LEDs sur les 8 bits qui servent à commander les diverses alimentation des sous systèmes du robot.
http://www.serveurperso.com:8080/
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#187
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 29 novembre 2017 - 09:21
Sympa Tu vas mettre quoi comme batterie ?
J'ai une autre question. Tu pilote l'alimentation des sous-système. La raison, c'est uniquement pour économiser l'énergie de la batterie ? Ou bien c'est un moyen de mettre la batterie en charge automatiquement ? Je me demande comment réaliser cette fonction de recharge à chaud, comme tu l'as fait.
#188
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 novembre 2017 - 11:22
La veille automatique coupe tout oui (soit manuellement, soit après le départ du dernier visiteur, soit après un timeout)
La réponse c'est que ya rien à faire : pour charger une batterie il suffit d'un générateur CC CV (courant constant / voltage constant) et d'un BMS pour l'équilibrage - le genre de petites cartes qu'on trouve sur Ali -> va falloir que JOJO s'occupe d'ajouter des BMS 2S/3S/4S sur la boutique 
Après c'est neuneu si tu tires moins que ce que tu charges bah ça charge sinon ça décharge... mon simple lipo à bas pris (genre 20 euros 4S 2500mAh) encaisse une année de fonctionnement sans monter le moindre signe de faiblesse. équilibré, jamais trop chargé ni trop déchargé..
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#189
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 29 novembre 2017 - 11:38
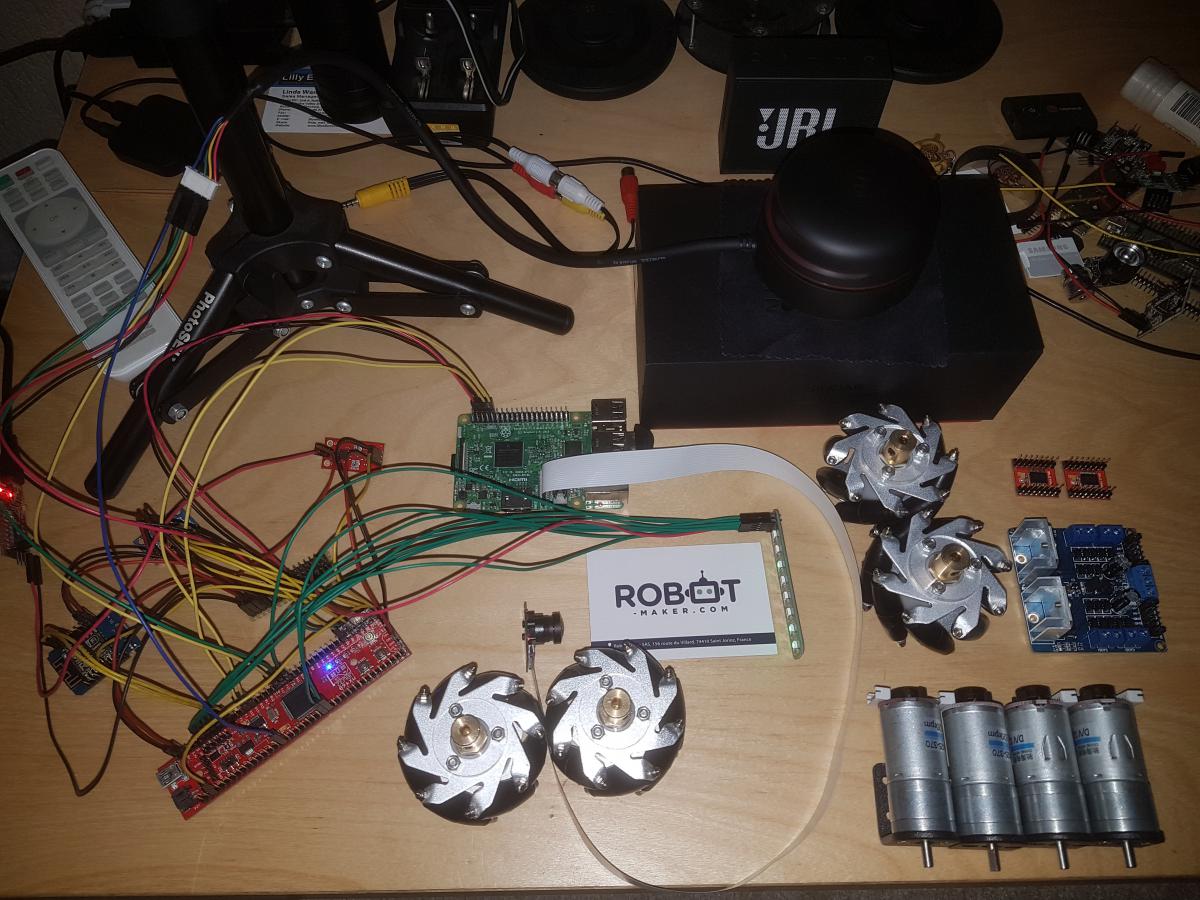
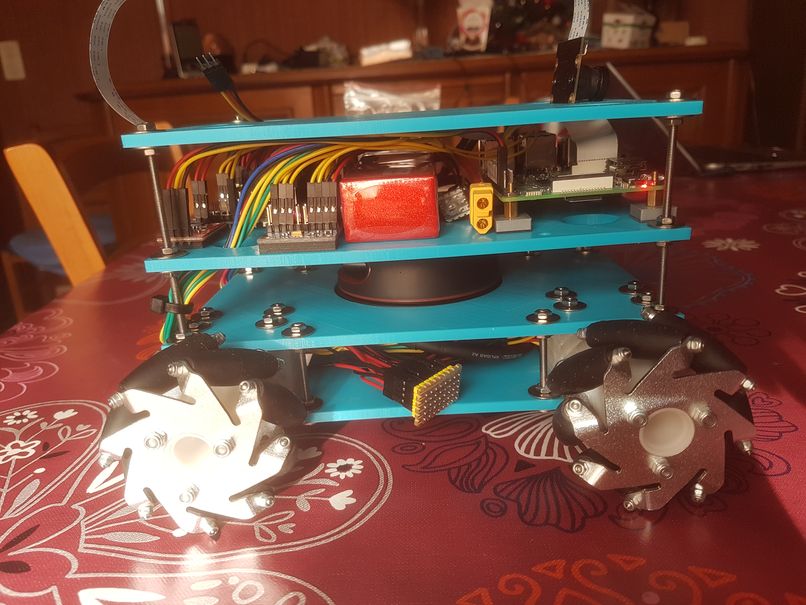
Par contre sur ce nouveau robot plus petit moins puissant je pense juste du 3S (2Ah et quelques) ça suffit...
Pouvoir couper des sous circuits complet à distance hyper pratique et sécuritaire. J'ai une petite carte avec 4 mosfets 15A 60V et une autre avec 1 relais et ce sera la même chose sur les 2 robots je pense...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#191
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 30 novembre 2017 - 09:54
Ben oui c'est neuneu lol
Après obtenir un état précis de la charge / pourcentage charge restante, faut utiliser un compteur de coulomb ou intégrer les mesures d'un capteur de courant mais c'est moins précis
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#192
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 02 décembre 2017 - 12:16
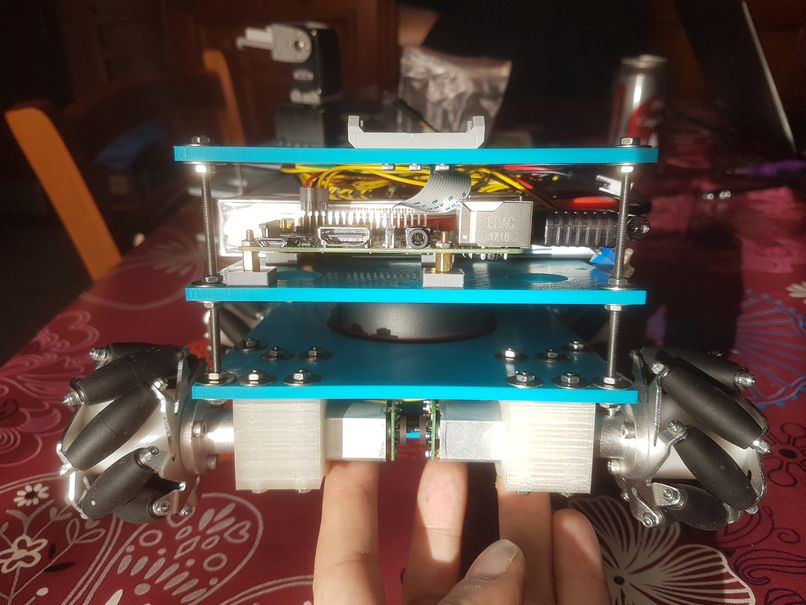
Hop le port série de la PI3 fonctionne a merveille à condition de virer le bluetooth :
dans
/boot/config.txt
ajouter
dtoverlay=pi3-disable-bt
dans
/boot/cmdline.txt
supprimer
console=serial0,115200
exemple la cmdline :
dwc_otg.lpm_enable=0 console=serial0,115200 console=tty1 root=PARTUUID=3df2c3b8-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait
devient :
dwc_otg.lpm_enable=0 console=tty1 root=PARTUUID=3df2c3b8-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait
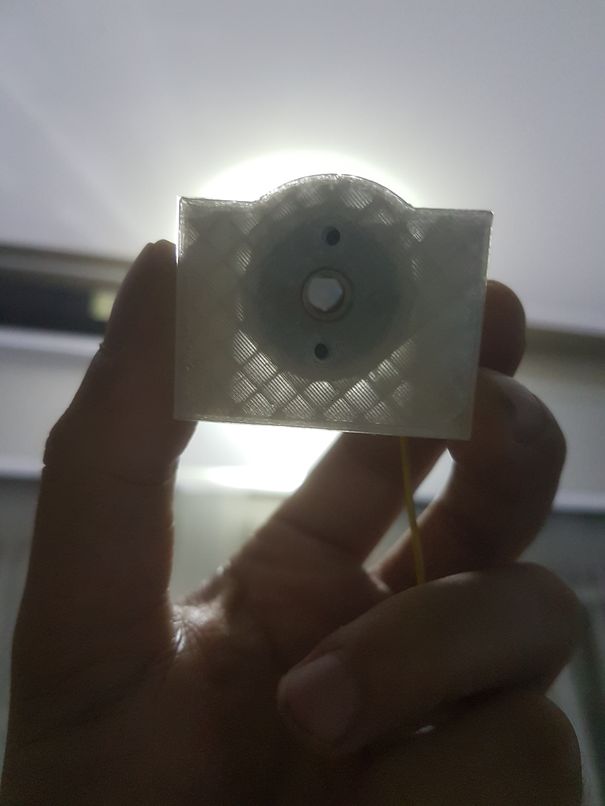
et hop une connectique minimaliste pour la PI sur le petit robot wifi

Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#193
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 02 décembre 2017 - 08:15
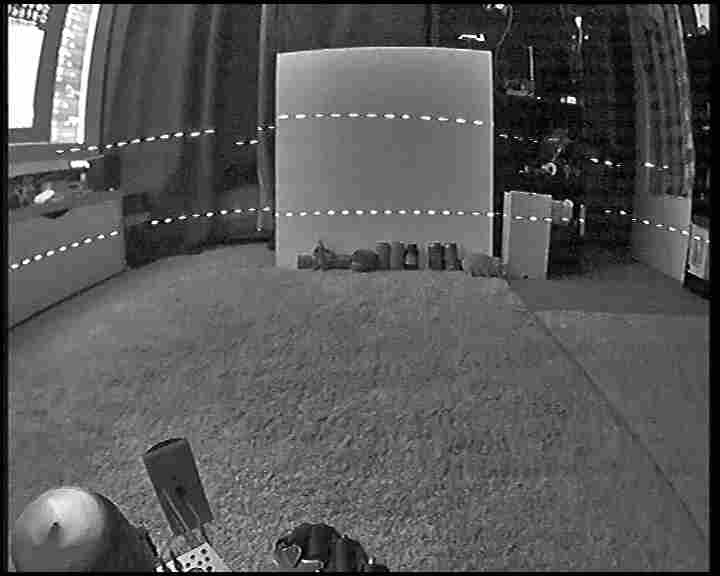
Allez tourne petit lidar tourne !!!
Double pointillés de lidars sur la cam infrarouge du premier robot:D
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#195
Mike118
-

- Administrateur
-
- 10â¯334 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 décembre 2017 - 02:33
Je vais répondre pour lui : non .
Le RPLIDAR A2 est branché sur le pic32 UBW =) .
- Serveurperso aime ceci
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#197
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 05 décembre 2017 - 10:24
Et HOP le robot PI (http://www.serveurperso.com:8080/) s'auto-programme son PIC32 en un clic sur l'IHM web:)
C'est l'architecture idéale pour le max de performances surtout si on déplace les mathématiques de la navigation sur la PI3 qui dispose maintenant de toutes les données lidar dans la trame télémétrie. La PI pour l'interface web et le PIC32 pour sa monstrueuse puissance de temps réel et son paquet d'I/O qui manque sévèrement sur la PI.
D’ailleurs ça pourrait permettre de faire faire le décodage 4K dans le PIC32 (avec les asservissement qui sont mieux dans un PIC32 que dans une PI) et la PI3 ne ferait que recevoir les données brutes tranquille vu que la connexion UART entre le PIC32 et la PI c'est du 230400 bauds.
Ca permet de faire passer du 4K sans aucune compression de données comme a du faire Slamtec en 115K
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#198
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 05 décembre 2017 - 10:52
Je met le log de compilation ici il montre le temps (heure à gauche) que ça prend sur la PI3 : plus d'une minute quand même, (versus quelques secondes sur le serveur i5.)
Du coup ce robot peux être trimbalé partout et dispose de l'environnement de dev complet (et de son interface web) intégrés
22:50:53:917 | 192.168.0.1 | Pascal | Admin | Ordre de démarrer la séquence de compilation et de flashage du firmware par Wi-Fi 22:50:53:920 | 192.168.0.1 | Pascal | Admin | Démarrage du processus Socat 22:50:53:921 | 192.168.0.1 | Pascal | Admin | /usr/bin/socat pty,link=/dev/ttyACM99,raw tcp:192.168.0.4:2323 22:50:54:020 | 192.168.0.1 | Pascal | Admin | Démarrage du processus UECIDE 22:50:54:021 | 192.168.0.1 | Pascal | Admin | /usr/bin/uecide --headless --board=chipkit-max32 --core=chipkit --compiler=pic32-tools --port=/dev/ttyACM99 --programmer=pic32prog --compile --upload /var/www/robotadmin/Robot32/Robot32.ino 22:51:14:703 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Compiling... 22:51:14:706 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | ============ 22:51:14:707 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Preprocessing... 22:51:26:717 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Compiling sketch... 22:51:41:367 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Compiling core... 22:51:41:386 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > api 22:51:41:452 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Compiling libraries... 22:51:41:469 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > SPI [/root/.uecide/libraries/Communications/chipkit/SPI] 22:51:41:485 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > MPU9250 [/root/.uecide/libraries/git/MPU9250] 22:51:41:501 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Watchdog [/root/.uecide/libraries/git/Watchdog] 22:51:41:520 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Pipe [/root/.uecide/libraries/git/Pipe] 22:51:41:533 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Timer [/root/.uecide/libraries/Time/chipkit/Timer] 22:51:41:549 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > SimpleTimer [/root/.uecide/libraries/Time/SimpleTimer] 22:51:41:567 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Wire [/root/.uecide/libraries/Communications/chipkit/Wire] 22:51:41:568 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Linking sketch... 22:51:51:082 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Generating eep file... 22:51:51:371 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Generating etx file... 22:51:53:739 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Generating hex file... 22:51:54:140 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Generating lss file... 22:52:03:177 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Compiling finished. 22:52:03:180 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | =================== 22:52:03:184 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Memory usage 22:52:03:186 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | ============ 22:52:03:451 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Program size: 94 940 bytes (18%) 22:52:03:455 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Memory size: 11 240 bytes (8%) 22:52:03:470 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Compilation took 36,991 seconds. 22:52:03:480 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Uploading firmware... 22:52:03:482 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | ===================== 22:52:03:544 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | * Uploading with STK500v2 protocol 22:52:03:571 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Resetting board 22:52:03:872 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | > Uploading firmware 22:52:06:053 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Programmer for Microchip PIC32 microcontrollers, Version 2.1.0 22:52:06:056 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Programmer for Microchip PIC32 microcontrollers, Version 2.1.0 22:52:06:064 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Copyright: (C) 2011-2015 Serge Vakulenko 22:52:06:065 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Copyright: (C) 2011-2015 Serge Vakulenko 22:52:07:334 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Adapter: STK500v2 Bootloader 22:52:07:335 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Adapter: STK500v2 Bootloader 22:52:07:338 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program area: 1d000000-1d1fffff 22:52:07:339 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program area: 1d000000-1d1fffff 22:52:07:386 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Processor: Bootloader 22:52:07:388 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Processor: Bootloader 22:52:07:393 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Flash memory: 2048 kbytes 22:52:07:395 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Flash memory: 2048 kbytes 22:52:07:395 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Boot memory: 80 kbytes 22:52:07:396 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Boot memory: 80 kbytes 22:52:07:400 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Data: 92380 bytes 22:52:07:404 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Data: 92380 bytes 22:52:07:405 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Erase: done 22:52:07:405 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Erase: done 22:52:26:416 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program flash: ..............................................############################################### done 22:52:26:419 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program flash: ..............................................############################################### done 22:52:26:422 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program rate: 4859 bytes per second 22:52:26:423 | 192.168.0.1 | Pascal | Admin | UECIDE | 728 | stdout | Program rate: 4859 bytes per second 22:52:27:530 | 192.168.0.1 | Pascal | Admin | Le processus UECIDE c'est arrêté après 93490 millisecondes avec le code de sortie 0 22:52:27:533 | 192.168.0.1 | Pascal | Admin | Envoi du signal SIGHUP au processus Socat 22:52:27:579 | 192.168.0.1 | Pascal | Admin | Le processus Socat c'est arrêté après 93637 millisecondes avec le code de sortie 129 22:52:27:581 | 192.168.0.1 | Pascal | Admin | Fin de la séquence de compilation et de flashage du firmware par Wi-Fi
- Oliver17 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#199
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 28 décembre 2017 - 11:06
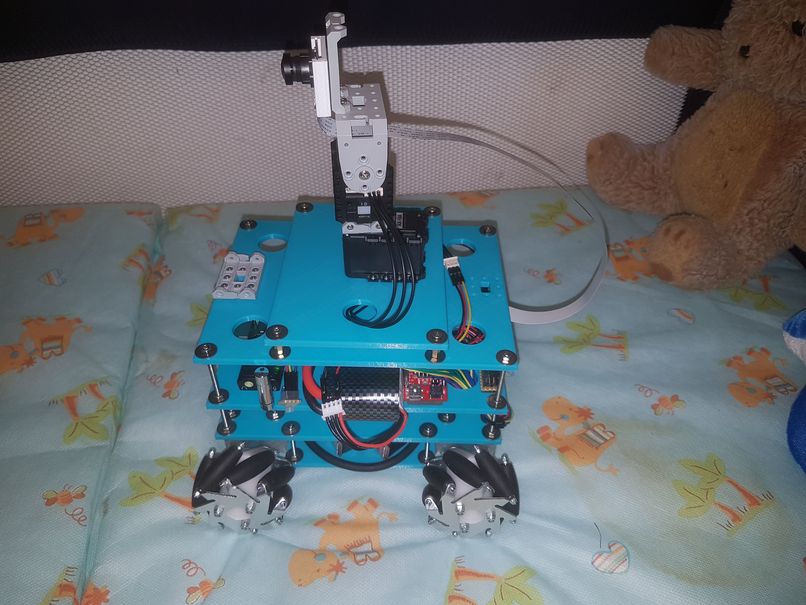
Voila, je voulais finir le robot portable avec le serveur web et les outils de développement intégrés avant la fin de l'année pour faire 2 robots roulants en une année, et c'est réussi le voici opérationnel
Manque que la pince mais cette partie ne presse pas.(ce sera du "plug'n'play" sur le bus dynamixel)


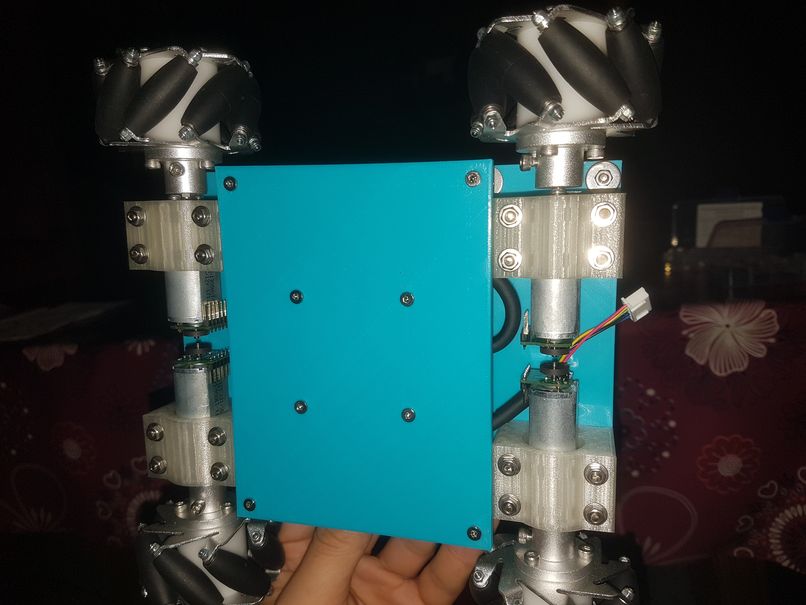





Et hop le nouveau né lol
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#200
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 29 décembre 2017 - 10:45
Toi c'est pas un petit Jésus que tu mets dans la crèche
Ça donne quoi sur un scan du Lidar les axes du support de plateforme ? Ça ne fait pas trop d'occlusion ?
Ah, et je suis jaloux de ta cam Pi avec une vraie longueur de nappe
Ça donne quoi sur un scan du Lidar les axes du support de plateforme ? Ça ne fait pas trop d'occlusion ?
Ah, et je suis jaloux de ta cam Pi avec une vraie longueur de nappe
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Robot, Node.js, Serveur, Web, UHF, Faible latence, Radioamateur, PIC32, HTML5, H.264
![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

