Mon contenu
Mon contenu Homme
Homme






 Posté par
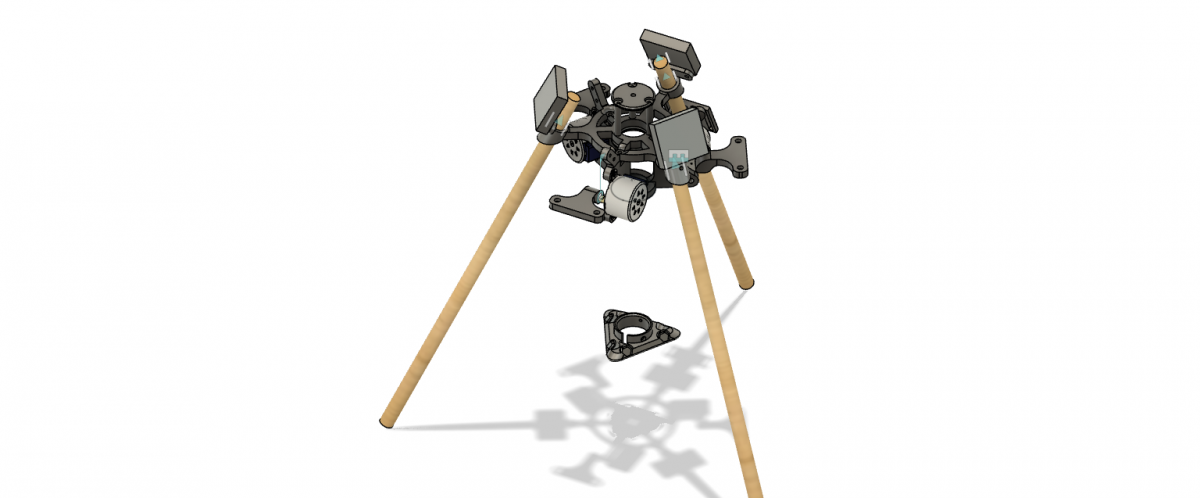
Posté par Ce que je recherche est une réduction de la réaction au mouvement pendant le mouvement. Similaire aux systèmes à contrepoids, mais sans limitation de distance et relativement indépendant de la gravité.[/color]
Bonjour,
Avez-vous déjà regardé du côté des volants d'inertie ? C'est une masse que l'on fait tourner, ça nécessite une énergie de base pour le ramener à la vitesse désirée (comme un contrepoids à besoin d'être remonté pour posséder une énergie potentielle de pesanteur) mais il doit sûrement exister un coupleur capable de lui donner de l'énergie ou de lui en prendre pour le reste du système

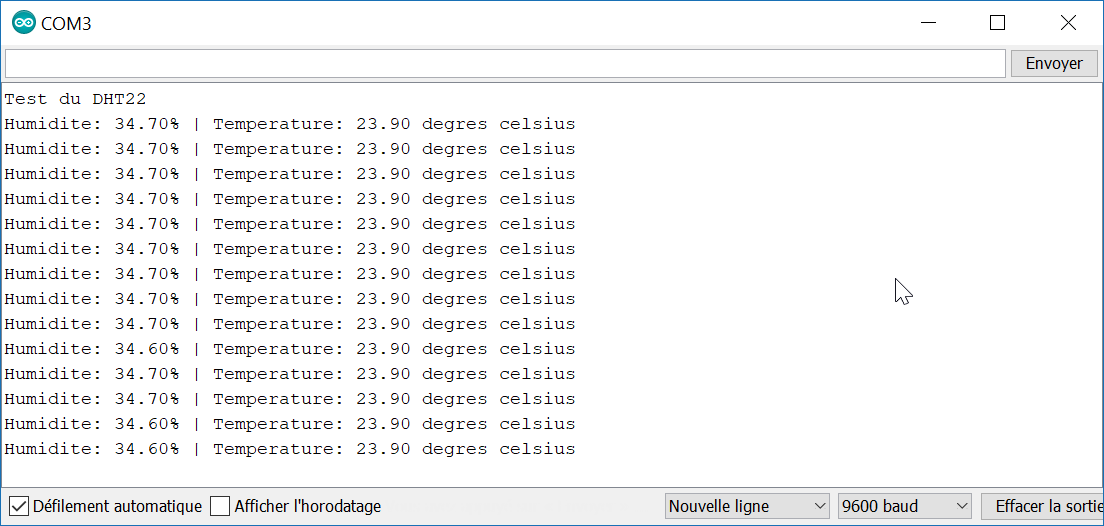
 Le programme de cet essai est disponible
Le programme de cet essai est disponible 

 )
)



 ) et très curieux de découvrir comment fonctionner tout ce qui m'entourait et en particulier tout ce qui volait (et j'avais un ami passionné de programmation). Avant de venir ici je voulais construire un robot volant comme j'avais pu certain en construire (comme celui de
) et très curieux de découvrir comment fonctionner tout ce qui m'entourait et en particulier tout ce qui volait (et j'avais un ami passionné de programmation). Avant de venir ici je voulais construire un robot volant comme j'avais pu certain en construire (comme celui de