Robots
-
 Construction d'un R2D2 échelle 1 motoriséAutre robot - - 22/02/2024
Construction d'un R2D2 échelle 1 motoriséAutre robot - - 22/02/2024Salut à tous, Suite à mon inscription je vous présente mon R2D2, échelle 1, motorisé et télécommandé. C'était mon 1er gros projet robotique, j'ai mis (quand même) 3 ans &agra...
-
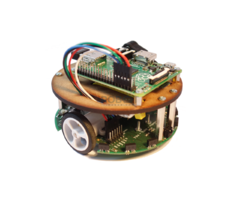
 Robot MR-PicoBase roulante - (Bretagne) - 24/03/2023
Robot MR-PicoBase roulante - (Bretagne) - 24/03/2023Le robot MR-Pico est un petit robot mobile Open Source programmable. Il est contrôler par une carte Raspberry Pi Pico. Spécification techniques : API Open source : python Deux moteurs à courant continu avec encodeurs en quadrature...
-
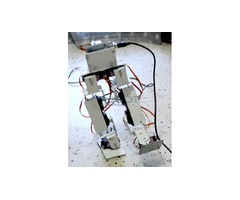
 ROBOPALRobot bipède - SAINT ROMAIN DE JALIONAS - 05/02/2023
ROBOPALRobot bipède - SAINT ROMAIN DE JALIONAS - 05/02/2023Robot fait maison : impression 3d , programmation arduino , 17 servos moteurs
-
 thermostat chaudièreAutre robot - BERNAC DEBAT (midi Pyrénées ) - 23/03/2021
thermostat chaudièreAutre robot - BERNAC DEBAT (midi Pyrénées ) - 23/03/2021Motorisation d'un thermostat de marque BUDERUS type BFU afin d'en faire un thermostat actionnable de n'importe quel endroit . La partie electronique est de fourniture ROBOT MAKER et l'adaptation à VIGIBOT realisée avec l'aide de Mike 11...
-
 Kani le robot quadrupèdeQuadripode - - 16/06/2020
Kani le robot quadrupèdeQuadripode - - 16/06/2020KANI est un proche cousin de KAME , autre robot quadrupède mais le projet KANI se caractérise par quelques points intéressants : ➔ L’ensemble des pièces à été complètement redessin&...
-
 RattlerBase roulante - - 07/10/2019
RattlerBase roulante - - 07/10/2019Rattler est une voiture de course radiocommandée rendue autonome pour participer à la Toulouse Robot Race 2019 avec seulement quelques capteurs TF Mini plus, et une arduino mega . Elle ne s'est pas illustrée...
-
 RBA #1Robot bipède - Montigny-le-bretonneux (île-de-France) - 02/07/2019
RBA #1Robot bipède - Montigny-le-bretonneux (île-de-France) - 02/07/2019RBA #1 (Robot Bipede Amhnemus) Partie mécanique : Toutes les parties mécaniques proviennent d'un kit de bipede BRAT (Lynxmotion), les pieds sont emprunté de la version plus grandes. Lien pour le kit :https://www.robot-maker.com/s...
-
 RobilBase roulante - - 28/05/2019
RobilBase roulante - - 28/05/2019Robil est un robot équipé de 4 roues mécanum, d'une tête pan tilt équipée d'une caméra avec vision nocturne, d'un télémètre capable de mesurer jusqu'à 12m et d'un pointeur la...
-
 VM10iMachine - - 30/10/2018
VM10iMachine - - 30/10/2018Modification de la télécommande de contrôle d'une VM10i de chez HURCO. but de la modif : remplacer un bouton rotatif à 12 position, dont 3 seulement servent pour les axes X,Y et Z, permettant de gagner en ergonomie. Restric...
-
 MinusBase roulante - - 22/10/2018
MinusBase roulante - - 22/10/2018Base roulante simple, principalement imprimée en 3D, piloté par le système de contrôle à distance vigibot. Deux servomoteurs permettent de déplacer la caméra. Deux autres moteurs servent au d&eacut...
-
 Horus Mk1Robot bipède - - 27/08/2018
Horus Mk1Robot bipède - - 27/08/2018Je vous présente mon robot bipède https://youtu.be/4QKclR7IER8
-
 RMAD, Robot Mobile Asservis en DistanceBase roulante - - 21/06/2018
RMAD, Robot Mobile Asservis en DistanceBase roulante - - 21/06/2018RMAD "le robot fou ( MAD Robot :) )" Robot longeant les murs grâce à un capteur de distance sharp, asservis en distance de manière complètement analogique sans microcontrôleur. vidéo : https:/...
-
 Rick Hunter, Inspecteur ChocRobot à chenilles - - 16/06/2018
Rick Hunter, Inspecteur ChocRobot à chenilles - - 16/06/2018Robot d'Inspection et de Contrôle de Kanalisations. Ce robot a été réalisé sur demande pour inspecter des canalisations de 300 mm de diamètre. Le robot est équipée d'une caméra de type gop...
-
 Robot 2018Robot coupe de robotique - Lannion (Bretagne) - 14/05/2018
Robot 2018Robot coupe de robotique - Lannion (Bretagne) - 14/05/2018Présentation du robot principal de l'équipe de l'ENSSAT pour la coupe de France de robotique2018. Les missions de ce robots sont : récupérer les cubes pour les mettre dans la zone, déclencher le panneau domotique et...
-
 MRPiZBase roulante - - 27/01/2018
MRPiZBase roulante - - 27/01/2018Le robot MRPiZ est un petit robot mobile programmable contrôler par une carte Raspberry Pi Zero W. Spécification techniques : API Open source : python, C et Java Deux moteurs à courant continu avec encodeurs en quadrature (400 tic...
-
 Cyno1Robot bipède - - 13/12/2017
Cyno1Robot bipède - - 13/12/2017Cyno1 : Robot Bipède autonome. Il se ballade dans des labyrinthes, contourne les obstacles (...) sans assistance. Robot sur base Arduino et print 3D. cout 74€ sans les pièces d'impressions Composé d'une UNO, 4 servomoteurs, ...
-
 Robot Serveurperso.comBase roulante - Paris - 27/09/2017
Robot Serveurperso.comBase roulante - Paris - 27/09/2017- Robot localisé au mm près, répétabilité des déplacements au cm près. - Développement du système embarqué Bare Metal sur un PIC32 80MHz - Aucun code bloquant, pile d'algorithmes l...
-
 CubDogRobot à chenilles - Genève - 02/06/2017
CubDogRobot à chenilles - Genève - 02/06/2017Hello tous! Voici CubDog à prononcer [kyoob dog] Cube car il est carré et dog car il est cencé nous suivre partout comme un toutou.. J'hésite aussi avec follower-cube pour le cube-suiveur, bref on s'en fous un peu :-...
-
 TinyBot24Autre robot - Le Mans (Pays de Loire) - 21/05/2017
TinyBot24Autre robot - Le Mans (Pays de Loire) - 21/05/2017TinyBot24 mini robot autonome diamètre 4cm poids 25 Grammes détection IR & LDR Petit robot autonome mû par deux servomoteurs de 3,7 Grammes à rotation continue. tous les fichiers de construction ici: https://drive.googl...
-
 Robarchi X.XXBase roulante - - 27/01/2017
Robarchi X.XXBase roulante - - 27/01/2017Si vous recherchez une base roulante XL pour vos propre programmes. Il y aura d'autres versions par la suite en fonction des options. Matériels : Raspberry atmega328p + quartz + 2 condensateurs, batterie 12v, des roues de 25 cm de diam&e...
-
 XbotMicroBase roulante - Belmont/Lausanne (Vaud) - 26/11/2016
XbotMicroBase roulante - Belmont/Lausanne (Vaud) - 26/11/2016Xbot est une plateforme qui permet de se concentrer sur la programmation. Les moteurs, drivers, moustaches, accu avec chargeur incorporé sont là, "propre en ordre" comme on dit dans le canton de Vaud. Connectez 6 pins depuis votre carte...
-
 Pablo OdysseusBase roulante - (Bretagne) - 16/09/2016
Pablo OdysseusBase roulante - (Bretagne) - 16/09/2016Pablo est un robot artiste Land Art autonome dont le but est de tracer de grands dessins sur les plages de sable à marée basse. La mission est prépérée avant le départ, le robot doit tracer le parcours avec l...
-
 E-RamboRobot bipède - Lyon (Rhône) - 26/04/2016
E-RamboRobot bipède - Lyon (Rhône) - 26/04/2016Robot bipède constitué de 9 servomoteurs SR-402P commandés par un microcontrôleur ATmega328P. Une carte bluetooth nRF8001 Adafruit permet de contrôler le robot par bluetooth depuis un smartphone. Il est capable d'avan...
-
 PLR1Base roulante - Saint Paul (Ile de la réunion) - 21/04/2016
PLR1Base roulante - Saint Paul (Ile de la réunion) - 21/04/2016Bonjour. Voici mon premier Robot nommé PLR1 (prononcé pèlerin). Celui-ci est basé sur une base roulante programmable de chez Parallax (ActivityBot). J'ai ajouté une carte raspberry pi, une batterie, des capteurs, un...
-
 Climber tankRobot à chenilles - (Ile de France ) - 10/04/2016
Climber tankRobot à chenilles - (Ile de France ) - 10/04/2016Mon objectif était de faire un char qui monte de vrais escaliers. Caractéristiques: longueur 86cm largeur 42cm hauteur 17cm poids 2kg 4 moteurs XL Lego Patins de chenille en D joint (joint de fenêtre)
-
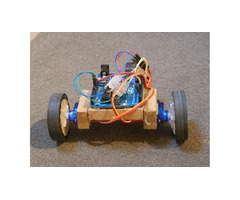
 Le robot à base d'une voiture RCBase roulante - - 08/04/2016
Le robot à base d'une voiture RCBase roulante - - 08/04/2016Caractéristiques techniques 1 Moteur de type "540", 1 Chassis 4*4 avec différenciels avant et arriere, Amortisseurs hydrauliques fournis avec le Kit! 1 Handy-Board à microprocesseur 68HC11 à 8MHz 1 Chargeur-Board pour la l...
-
 Script-BotAutre robot - - 08/04/2016
Script-BotAutre robot - - 08/04/2016Ce Robot a pour but d'inscrire des indications (mots) sur une grande surface plane(pour faire des banderoles par exemple) Ce robot a était fait sur 2ans,dans le cadre des cours de TPE. Prix: pas facile à définir car beaucoup de p...
-
 MRPi1Base roulante - Rennes (Bretagne) - 27/03/2016
MRPi1Base roulante - Rennes (Bretagne) - 27/03/2016Le robot MRPi1 est un robot Open source controler par une carte nano-ordinateur Raspberry Pi A+. La carte Raspberry Pi A+ permet d'avoir un Linux embarqué (Raspian) sur le robot et une programmation haut-niveau. Le robot est donc programmable ...
-
 KhairobotRobot bipède - Annaba - 20/03/2016
KhairobotRobot bipède - Annaba - 20/03/2016Mon premier bipède homemade, il est basé sur Arduino Uno et 8 servos MG946R.
-
 CubeBase roulante - Plonéour Lanvern (Bretagne) - 09/01/2016
CubeBase roulante - Plonéour Lanvern (Bretagne) - 09/01/2016Bonjour, Je vous présente Cube, un robot polyvalent de type base roulante et construit autout d'un Raspberry Pi B et d'un Arduino Mega 2560. Il est composé de : capteurs infrarouges (3), capteurs ultrasoniques (3), microswitchs (2), mot...
-
 Robot 3 roues open sourceBase roulante - Château-Thierry (Picardie) - 05/01/2016
Robot 3 roues open sourceBase roulante - Château-Thierry (Picardie) - 05/01/2016Robot 3 roues open source Matiere : bois 5 mm Electronique : 1x Arduino Uno 1x Motor Shield 1x Capteur infrarouge et télécommande 1x télécommande (lecteur DVD pour le Fun) 2x Moteurs 1x ruban Led vert 2x coupleur de pile (...
-
 pas encore de nomBase roulante - lyon (france) - 13/12/2015
pas encore de nomBase roulante - lyon (france) - 13/12/2015c'était un robot complètement autonome navigation slam ,exploration et pick and pose avec carte arduino mega IMU laser scan 2d lidar kinect pour le PCL et 1 pc comme centre de contrôle.
-
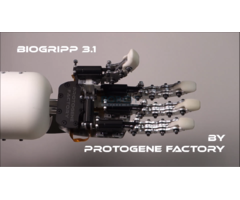 BioGripp 3.1 - Main robotiqueRobot humanoïde - Berlin (Berlin) - 03/11/2015
BioGripp 3.1 - Main robotiqueRobot humanoïde - Berlin (Berlin) - 03/11/2015J´ai construit cette main car je voulais faire mieux que les prothèses imprimées 3D qui fonctionnent avec des files de pêche. Elles sont esthétiquement parfaites mais elles n´ont pas la force nécessaire p...
-
 Wall-E autonomeBase roulante - (Sarthe) - 13/09/2015
Wall-E autonomeBase roulante - (Sarthe) - 13/09/2015J'avais acheté ce jouet à friction sur ebay ( avec l'intention de le rendre autonome) impressionné par le véritable jouet radiocommandé qui lui hélas est beaucoup plus cher Surprise en faisant des recherches,...
-
 Ro-BonnetRobot bipède - - 13/09/2015
Ro-BonnetRobot bipède - - 13/09/2015Mon but était de faire un robot le moins cher possible. Ayant une imprimante 3D, j'ai juste investi un peu : arduino mini (copie) HC06 (com BT) accelero-gyro = MPU6050 : pour une utilisation ultérieure, pour l'instant je ne fait que r&e...
-
 XbotMicroBase roulante - Belmont/Lausanne (Vaud) - 21/08/2015
XbotMicroBase roulante - Belmont/Lausanne (Vaud) - 21/08/2015Le XbotMicro est une plateforme prévue pour une carte compatible Arduino, mais elle peut accepter n'importe quel microcontrôleur qui a 7 entrées-sorties. Un connecteur d'extension pour un choix de capteurs demande 3 entrée ...
-
 Lu-bot V1Robot sumo - - 05/07/2015
Lu-bot V1Robot sumo - - 05/07/2015Un tout premier robot mais pas le dernier. Le but était de faire le plus petit possible avec de la récupèration. Il a des problème d'alignement et ne roule pas droit mais ce n'est qu'un début
-
 uXplorerRobot à chenilles - (Aquitaine) - 24/02/2015
uXplorerRobot à chenilles - (Aquitaine) - 24/02/2015Bonjour, Je viens vous presentez le dernier vehicule blindé :) sortie de mon apartelier.Il s'agit d'un petit chenillard d'environ 500gr, commandé a distance via radio-commande et avec une camera pour le Fpv.Grace a ces 2 puissante led, ...
-
 CubicBase roulante - - 21/01/2015
CubicBase roulante - - 21/01/2015Ce petit robot se déplace grâce à deux servomoteurs modifiés, de manière aléatoire sur une aire de jeu.Sa tâche est de récupérer les palets qu'y s'y trouvent, pour les amener vers les bords...
-
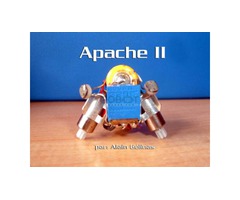 APACHE IIAutre robot - - 18/01/2015
APACHE IIAutre robot - - 18/01/2015Voici un p'tit chercheur de luminosité, ces moteurs de 4 mm de diamètre, ronronnent comme des ptits chats! Sa vitesse de pointe est de 30 cm/seconde. Un accu de 1,5v donnes tout son jus pour une durée de 5 minutes de plaisir. La ...
-
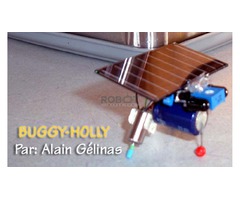 Buggy-HollyAutre robot - - 18/01/2015
Buggy-HollyAutre robot - - 18/01/2015Bonjour, désolé de prendre beaucoup d’espace sur le roboscope, mais j’adore faire des p’tits robots. Bref…Que voulez-vous?Bon voilà un beam solaire que j’ai fabriqué qu’avec des pi&egra...
-
 KRAPQuadripode - - 18/01/2015
KRAPQuadripode - - 18/01/2015Ce robot a été très sympa à réaliser, il ne ma pas couté très cher, environ 150E. Il est actionné par 8 servos (2 par patte) et la partie intelligence est réalisée par un 16F84 cou...
-
 KHEPERHexapode - - 18/01/2015
KHEPERHexapode - - 18/01/2015Il s'agit d'un hexapode minuscule, basé sur le Basic Stamp de Parallax. Outre sa taille, l'originalité de KHEPER tient dans sa conception. L'agencement des différents "organes" et des processus électriques internes est dir...
-
 Automates en legoRobot bipède - - 18/01/2015
Automates en legoRobot bipède - - 18/01/2015Première image :celui-ci est un automate bipède, il est construit à base du "Dark side developer kit" de lego. J'aime beaucoup construire des bipèdes parce-qu'ils sont difficiles à faire marcher correctement, il me ...
-
 YemoRobot sumo - - 18/01/2015
YemoRobot sumo - - 18/01/2015Yemo a été conçu pour participer aux concours de robot sumo, ce qui m’a obligé à faire des choix techniques pour respecter le règlement (des matériaux particuliers, une source d’éner...
-
 ASA v2Robot d'entretien - Québec - 18/01/2015
ASA v2Robot d'entretien - Québec - 18/01/2015ASA v2, l'aspirateur semi-autonome. Ce robot est capable de suivre les ordres d'une télécommande pour nettoyer une pièce. L'aspiration se fait par le biais d'une turbine, propulsée par un moteur de 60W. Bientôt, le r...
-
 NimesisRobot sumo - Nimes - 18/01/2015
NimesisRobot sumo - Nimes - 18/01/2015Nimesis a vu le jour dans le cadre de l'iut GEII de Nimes en vue de participer au concours national de robot mini sumo organisé début Avril a Nimes.Nimesis a été réalisé en aluminium et autre matériaux...
-
 Arob@zBase roulante - - 18/01/2015
Arob@zBase roulante - - 18/01/2015C6PO est un club de robotique, situé à Perpignan. Nous avons conçu Arobaz pour participer aux Trophées de Robotique 2005.Ce robot devait être capable de ramasser avec sa pince des cubes placés sur le plateau d...
-
 Lux-botBase roulante - - 18/01/2015
Lux-botBase roulante - - 18/01/2015Voici mon premier robot,simple,il suis la lumière.Deux photoresistances avec des amplis montés en comparateurs permettent au robot de controller les moteurs droit et gauche!inconvenients:-la partie puissance (un simple transistor) ne d&...
-
 OlafBase roulante - - 18/01/2015
OlafBase roulante - - 18/01/2015OLAF est un robot de type BEAM sur lequel partant d'un robot du nom de Ali trouvé sur le net , modifié profondément toute la partie mécanique et ajouté des cartes éléctroniques à savoir un pont ...
-
 DIXI1Autre robot - - 18/01/2015
DIXI1Autre robot - - 18/01/2015DIXI est un ROV cad un robot sous-marin d'exploration. Il est filoguidé et doté d'une caméra et de capteurs divers ( profondeur , cap , température , ... )Vue montrant le compartiment étanche et le hublot de la cam&...
-
 ChenillardRobot à chenilles - - 18/01/2015
ChenillardRobot à chenilles - - 18/01/2015C'est un robot à chenilles dont le chassis est réalisé en LEGO. la propulsion est assurée par 2 servos de modélisme modifiés afin de pouvoir tourner indéfiniment. Il est pour l'instant tél&eacut...
-
 NestorBase roulante - - 18/01/2015
NestorBase roulante - - 18/01/2015Aprés avoir réalisé R2D2, robot géant, et mecha tama, robot à haut niveau d'intelligence, j'ai voulu faire un robot qui serait cette fois plus simple mécaniquement et électroniquement. Un petit robot q...
-
 ObeeOneRobot sumo - - 18/01/2015
ObeeOneRobot sumo - - 18/01/2015Voici mon tout premier robot ObeeOne (one parce que c'est le premier ...) Il est constitué d'une base de robot SUMO1 PICBASIC PB-3B 2 Capteurs infra rouge IS 471F2 servos modifiés en moteurs (sans electronique)2 ponts en H de chez micro...
-
 NAUTILEAutre robot - - 13/01/2015
NAUTILEAutre robot - - 13/01/2015Echelle 1/8Dimension L 100cm l 35cm H 38 cmPoids 32KgsSous marins Radiocommandée robotisé, pilotage via radiocommande ou en mode autonome.Actuellement en cale séche pour modification de l'électronique embarqué et fi...
-
 RobojumpBase roulante - - 13/01/2015
RobojumpBase roulante - - 13/01/2015Le robot est construit pour ramasser des cubes et de construire une tour avec. Il a participé aux Trophées de Robotique 2005. On a eu besoin (je l'ai construit avec des amis) d' environ 200 heures pour le réaliser. J'ai du d&eacu...
-
 HR-V1Robot bipède - - 13/01/2015
HR-V1Robot bipède - - 13/01/2015HR-V1 est le nouveau corps réalisé par Alexander Vogler, destiné à être positionné à long terme et suite à des perfectionnements sur la base déjà existante de "Biped V-3" Le but fin...
-
 FerrailleBase roulante - (Aquitaine) - 13/01/2015
FerrailleBase roulante - (Aquitaine) - 13/01/2015Mon second robot, il se promenne en evitant les obstacle. Le chassis a été realiser entierement en composite (verre+polyester) Plus d'info sur le fofo.
-
 Small Bot v2Base roulante - (Aquitaine) - 13/01/2015
Small Bot v2Base roulante - (Aquitaine) - 13/01/2015Petit robot eviteur d'obtacle basé sur un Attiny 85. Le but été de faire un robot le plus petit et plus simple possible. Photos a venir
-
 SyLaMRobot d'entretien - - 13/01/2015
SyLaMRobot d'entretien - - 13/01/2015Mon premier Robot SYdney LAwn Mower : né à Sydney, pour tondre ma pelouse sans mon intervention, il a finallement fait ses premiers tours de roues à Toulouse. L'objectif de ce robot tondeuse est de pouvoir faire une tonte parall&...
-
 RobomicBase roulante - - 13/01/2015
RobomicBase roulante - - 13/01/2015Bonjour,voici mon premier robot.ROBOMICSon programme evolutif a l'infinie lui permet deContourner les obstacles et explorer.Saisir des objets manuellement.Saisir des objets en mode automate.Il mesure 220x165 mm hors bras.il possede 2 capteurs ir a l'...
-
 RhinobotRobot sumo - - 13/01/2015
RhinobotRobot sumo - - 13/01/2015salut a tous, depuis pas mal de temps je suis sur le forum de robot-maker et je n'avais jamais presenté une de mes realisations. ce robot est un mini sumo qui pèse environ 470g. il mesure 9.5cm x 10cm x 11.5cm.il ne ma rien couté...
-
 Snake1Base roulante - - 13/01/2015
Snake1Base roulante - - 13/01/2015Bonjour totu le monde je vous présente snake1... mon premier robots il s'agit d'un photovore.Le schémas éléctronique sort tout droit de "Je construits mon premier robot mobile" de Frédéric Giamarchi.Son nom,i...
-
 CorsaireRobot sumo - - 13/01/2015
CorsaireRobot sumo - - 13/01/2015Corsaire est le robot mini-sumo borgne qui a été présenté pendant le tournoi de robots mini-sumo de Nîmes les 25 et 26 mars 2006.Présenté hors catégorie par son concepteur, il représente l...
-
 Grand' vadrouilleBase roulante - - 13/01/2015
Grand' vadrouilleBase roulante - - 13/01/2015bon, voila un suiveur de ligne. a l'heure ou je vous presente ce robot, il n'est pas encore programmé, mais bon, ça pose pas vraiment de probleme.la partie mecanique est composé de 2 moteurs de lecteur CD, la reduction se fait pa...
-
 Limen MillesimusBase roulante - - 13/01/2015
Limen MillesimusBase roulante - - 13/01/2015Le Limen Millesimus a été concipé pour les Trophées de Robotique en 2006 et il a gagné les Trophées du Luxembourg.Le robot possède deux "bras" avec lesquels il ramasse des balles de tennis de table. Le...
-
 White robotBase roulante - - 13/01/2015
White robotBase roulante - - 13/01/2015temps: 5 jours.argent: 0?.taille: 10x10x20cm.poids: environ 100g.l'IA: dès qu'il rencontre un mur il tourne automatiquement grace a un système de court-circuits.
-
 Robot champion de Belgique 2006 !Base roulante - - 13/01/2015
Robot champion de Belgique 2006 !Base roulante - - 13/01/2015Bonjour à tous ! Me revoilà sur Robot maker ! Il y a un an, j'ai posté le robot que j'avais fait avec une équipe (les 3 frères) et qui nous avait permit d être Vice champion de Belgique 2005.Cette année...
-
 NemesisRobot à chenilles - - 13/01/2015
NemesisRobot à chenilles - - 13/01/2015J'ai créer, comme projet de fin d'études en télécommunications, un robot, basé sur le design du Packbot et ayant la capacité de grimper des escaliers.Temps: 2 ans de planification 2 mois de constructionCo&uci...
-
 Robby GortAutre robot - - 13/01/2015
Robby GortAutre robot - - 13/01/2015Un robot graveur, rippeur de CD réalisé avec des matériaux de récupération. Robby Gort (c'est son nom) est piloté à l'aide d'une interface web et utilise un système «client / serveur»...
-
 TwinnyRobot bipède - - 13/01/2015
TwinnyRobot bipède - - 13/01/2015Realisation d'un bipede de faible cout pour l'etude d'un marche statique puis dynamique la plus simplifiee possible. Actuellement seules les jambes sont realisees. La mecanique et l'electronique sont termines. La phase de programmation vient de debut...
-

-
 IzibotAutre robot - - 13/01/2015
IzibotAutre robot - - 13/01/2015Robot d'initiation non programmable autonome ou par commande filaire. Coût 50 euros envrion, 20 heures de temps passé, circuits imprimés réalisés par Etronics.free.fr.Le livre "La robotique à la portée ...
-
 QuibyBase roulante - - 13/01/2015
QuibyBase roulante - - 13/01/2015Ce robot a été fabriqué pour un forum des métiers afin de présenter les larges possibilités qu'offre le métier d'automaticien. Caractéristiques:Temps: 1 été de travailDimension: &O...
-
 Green R BotRobot d'entretien - - 13/01/2015
Green R BotRobot d'entretien - - 13/01/2015Après Sylam, le robot tondeuse voici Green R bot le robot tondeuse de deuxième génération.Le robot Sylam n'ayant pas la puissance de coupe voulue, son auteur planche sur une autre version corrigeant les erreurs passé...
-
 QuibotAutre robot - - 13/01/2015
QuibotAutre robot - - 13/01/2015Voici un robot expérimental concu dans le but de tester différents algorithmes de traitement du signal/d'image.visitez mon blog, vous en saurez un peu plus!
-
 HumabotRobot humanoïde - - 13/01/2015
HumabotRobot humanoïde - - 13/01/2015Projet commercial avorté de robot humanoide basé sur des supports de servo standards.Heures passées : trop !Cout : investissement dans une fraiseuse numérique.Pilotage prévu par microcontroleur : l'électroniq...
-
 VMOBase roulante - - 13/01/2015
VMOBase roulante - - 13/01/2015Voici un robot développé sur la base du foxboard et controlé via du wifi ou du bluetooth, équipé d'une webcam et de 3 capteurs infrarouge, il permettra dans le futur d'être autonome. Actuellement controlable d...
-
 JeanPinceBase roulante - - 13/01/2015
JeanPinceBase roulante - - 13/01/2015Bonjour à tous,Ce robot-pince a été construit via une base (base roulante + bras + pince) EasyRobotic.Nous avons équipé le robot d'une carte électronique comprenant un sharp (pour la détection de l'obj...
-
 bigoud 1Robot sumo - - 12/01/2015
bigoud 1Robot sumo - - 12/01/2015Mon robot de combat bigoud 1 est un robot qui pèse 1 kilos, il avance à 20 km/H, il va bientôt être équipé d'un lance flame et un pisolet à eau c'est un robot sumo frabriqué en contre plaqué...
-
 MYTHOSBase roulante - - 12/01/2015
MYTHOSBase roulante - - 12/01/2015MYTHOS un robot controlé par le nouveau microcontroleur paralléle de PARALLAX: le PROPELLER Le but était de tester quelques unes des possibilités de ce nouveau controleur.En effet nous avons pu y connecter 3 détecte...
-
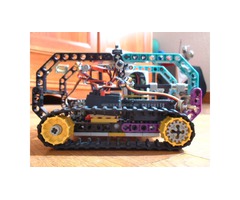
 James BondRobot à chenilles - - 12/01/2015
James BondRobot à chenilles - - 12/01/2015j'ai conçu ce robot dans un but de pur amusement et pour l'espionnage il a une autonomie de environ 30 minutes Il m'a couté environ 250 euros mais j'en suis fier son seul probleme est qu'il n'est pas du tout automome étant donn&e...
-
 HexabotHexapode - - 12/01/2015
HexabotHexapode - - 12/01/2015J'ai réalisé ce robot, car c'était un vieux rêve depuis FX Effets Spéciaux avec Bleuet ;)Le robot est en cours de construction, le chassi est fini (sauf améliorations), il reste encore à programmer le s...
-
 BumpyBase roulante - - 12/01/2015
BumpyBase roulante - - 12/01/2015It is a simple bumper that use two motors of chip chiness dvd and a a switch on-off at the back (at fron are most dispositives an no place)that interrupted de bridge batteries.
-
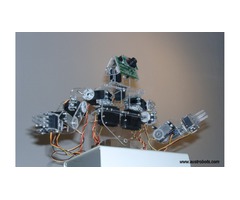
 CALIBANRobot humanoïde - - 12/01/2015
CALIBANRobot humanoïde - - 12/01/2015CBN-001 alias CALIBAN est un robot humanoïde full scale.Ce robot exploite un logiciel que j'ai développé durant 5 ans et exploitant la méthode heuristique pour effectuer des analyses contextuelle. Ce programme servait aupara...
-
 Alpha 2Base roulante - - 12/01/2015
Alpha 2Base roulante - - 12/01/2015Bonjour ceci est Alpha 2, grand frère d'un robot sacrifié pour la cause. Sur une carte E/S à partir d'un PICAXE j'ai crée toute la partie opérative, sa fonction etant de convoyer des pieces d'un poste de production ...
-
 BipedScoutRobot bipède - - 12/01/2015
BipedScoutRobot bipède - - 12/01/2015C'est le début d'une grande aventure. Voici un chassis de Scout Lynxmotion. Toutes les cartes sont fabriqués et programmées par ma pomme.Je développe le soft sur pc pour gérer tous les mouvements, puis j'envoie les ...
-
 Robot suiveur de lumièreBase roulante - - 12/01/2015
Robot suiveur de lumièreBase roulante - - 12/01/2015le châssis un CD le schéma : du robot "cocotix" un peu modifié. Moteur type jouet (voir photo du jouet en question)
-
 ELIPTONQuadripode - - 12/01/2015
ELIPTONQuadripode - - 12/01/2015Elipton est un quadripode araignée dont la commande est assuré par un basic stamp II de la société parallax.8 servos de modèlisme sont utilisé pour la mécanique des "pattes" qui sont, elles, réalisées en aluminium. La mécanique selon son concepteur n...
-
 PioupiouBase roulante - - 01/05/2004
PioupiouBase roulante - - 01/05/2004Micro: PIC16F876, avec bootloader pour une programation simple et rapide par RS323 Batterie de 7.2 Volts Ni/Cd. 4 detecteurs de presence infrarouge. 8 micro contact 4 switchs de configuration pour le programme du micro. Bouton reset Une LDR Un buzzer...
-
 Robot VIZZBase roulante - - 01/05/2004
Robot VIZZBase roulante - - 01/05/2004Descriptifi : Utilisant deux servomoteur pour sa locomotion, trois capteurs infra-rouge modulés et deux non-modulé, un capteur de position et un PIC basic pour la partie commande et traitement des informations, ce petit robot semble tr&...
-
 Biped V-3Robot bipède - - 01/05/2004
Biped V-3Robot bipède - - 01/05/2004Caractéristiques techniques: Nom V-3 début du projet année 2000 Dimensions H 30cm, W 21cm, D 11cm Poid 1200g Vitesse 2cm/s source d'alimentation externe Liberté de mouvement 12 akt. DOF Coût 500Euro Note des webmaste...
- 1
